Arne Nordmann ist von Kindesbeinen an Robotik-Fan und hat sich deswegen im Dezember 2008 entschlossen, seine Begeisterung in Form eines Blogs zu teilen. Er hat Elektrotechnik an der TU Dortmund studiert und an der Universität Bielefeld in der Robotik promoviert. Seit 2015 arbeitet er bei Bosch in der Forschung an der modell-getriebenen Entwicklung komplexer, software-lastiger Systeme wie z.B. Roboter und hoch-automatisierte Fahrzeuge.
Da ich es in den letzten Wochen wegen akuter Überarbeitung nicht zu enormer Aktivität geschafft habe und sich das vermutlich in den nächsten Tagen erst einmal nicht ändern wird, hier schon einmal ein paar Links der letzten Wochen. Über Roboter, die sich entschuldigen, selbständige Mondfähren und die Zusammenarbeit von Mensch und Roboter. Und nun geht’s ab nach Oslo …
Soziale Roboter„Ich weiß, es ist schwierig mit mir zu arbeiten“, sagt der Roboter. Welche Fähigkeiten und Verhalten benötigen Roboter, damit Menschen sie als angenehme Gesellschaft empfinden und sich in Anwesenheit von Robotern wohlfühlen? Das „Exzellenzcluster Cognitive Interaction Technology“ (Citec) in Bielefeld geht dieser Frage nach.Ich weiß, es ist schwierig mit mir zu arbeiten(Süddeutsche, Katrin Blawat, 18. August 2010)LaufmaschineArtikel über die Laufmaschine BioBiPed, die im Rahmen eines Forschungsprojekts des Lauflabors Jena und der TU Darmstadt wntwickelt wird. Das Außergewöhnliche: Der Roboter soll zuerst rennen und dann erst gehen lernen.Eine Laufmaschine lernt gehen(Heise Online, Hans-Arthur Marsiske, 20. August 2010)Weltraum-RobotikBis 2018 will Weltraumorganisation ESA ein unbemanntes Raumschiff zum Mond fliegen lassen. „Die Mondfähre muss Hindernisse, steile Hänge und Krater beim Anflug erkennen, ihnen ausweichen und selbstständig einen geeigneten Landeplatz suchen können“, ein typischer Anwendungsfall der explorativen Robotik.Europäische Roboter sollen 2018 auf Mond landen(Spiegel Online, Cinthia Briseño, 16. September 2010)Servicerobotik„Milliardenmarkt Maschinenmensch“ – Das Handelsblatt beobachtet, dass Roboter aus den Werkshalle, also dem industriellen Umfeld, mehr und mehr in den Alltag wandern. Ob in der Medizintechnik, zur Pflege oder als Staubsauger- und Spielroboter.Roboter laufen aus den Werkshallen(Handelsblatt, Martin Murphy und Hans Schürmann, 29. September 2010)Roboter-Ethik„Roboter sollen nicht töten dürfen“ – Tina Klopp schreibt über die Fiktion eines bloodless war, eines Krieges ohne Verluste, und von der Forderungen des Ethikers Rob Sparrow nach einem Menschenrecht, nicht von Robotern getötet zu werden.Roboter sollen nicht töten dürfen(ZEIT Online, Tina Klopp, 27. September 2010)Roboter als MitarbeiterDer Industrieroboterbauer Reis Robotics will zusammen mit fünf Partnern aus Industrie und Forschung in den nächsten drei Jahren daran arbeiten, Roboter ohne räumliche Trennung mit Menschen zusammenarbeiten zu lassen. Eine Aufgabe, die wegen der Kraft und des Gewichts von Robotern dringend Sicherheitsfragen aufwirft.Roboter sollen Hand in Hand mit Menschen arbeiten(Main-Netz, Nina-Anna Beckmann, 29. September 2010)
Über Hinweise zu lesenswerten Artikeln freue ich mich jederzeit. Entweder per Kommentar oder per E-Mail anbotzeit@ohmpage.org
Raumfahrer.net fragt bei der ESA, der Europäischen Weltraumorganisation, und der Planetaren Explorationsgruppe im Institut für Robotik und Mechatronik im DLR nach, was die Europäer bei ihrer Version des Marsrovers besser machen als die NASA: Das Antriebssystem des ExoMars-Rovers.
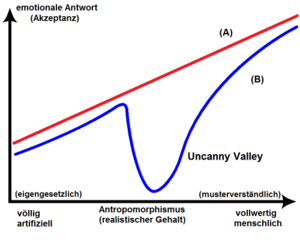
Das Uncanny Valley (englisch für „unheimliches Tal“) ist die Bezeichnung für einen psychologischen Effekt, der in der Robotik bei humanoiden Robotern auftritt. Der Effekt ist scheinbar widersprüchlich, aber deutlich messbar. Er bewirkt, dass humanoide Roboter dem Menschen nicht in dem Maße vertrauter werden wie sie ihm ähnlicher werden.
Das Uncanny Valley, das unheimliche Tal
Bis zu einem gewissen Maße ist dies zwar der Fall: Ein ASIMO ist uns vertrauter als eine Blechbüchse. Aber irgendwann kippt dieser Effekt und wir beginnen, uns zu gruseln. Es ist der Moment, in dem unser Unterbewusstsein beginnt, in dem Roboter tatsächlich eine menschliche Gestalt zu erkennen. Unser Unterbewusstsein beginnt in dem Moment allerdings auch, an diese menschliche Gestalt all die Ansprüche zu stellen, die wir an einen Menschen stellen. Wir erwarten Mimik, dass sich der Brustkorb beim Atmen bewegt, dass die Augen mit uns Blickkontakt aufnehmen, vielleicht blinzeln und wir erwarten vor Allem weiche, natürliche, menschliche Bewegung. Sehen wir eine menschliche Gestalt (die gilt übrigens im gleichen Maße für animierte Figuren etwa in einem Computerspiel) und vermissen diese Aspekte, signalisiert uns unser Unterbewusstsein, dass irgendetwas nicht stimmt. Schuld ist hier wie so oft unser Fortpflanzungstrieb, der uns potentielle Partner kontinuierlich auf Hinweise auf Fehlbildungen oder Krankheiten absuchen lässt.
Der Effekt lässt sich wie gesagt messen und wie in obiger Grafik darstellen (entnommen der Wikipedia). Die Grafik zeigt in rot die intuitive Annahme, dass die (emotionale) Akzeptanz mit der Menschenähnlichkeit steigt und in blau die tatsächliche Akzeptanz, die kurz vor der Menschenähnlichkeit dramatisch einknickt und den Betrachter verstört.
Zurück zur Robotik: Das Uncanny Valley zu Umschiffen ist für die Erbauer humanoider Roboter eine wichtige Frage. Wollen Sie den Roboter für die Interaktion mit dem Menschen erbauen (und das ist bis auf wenige Ausnahmen bei Humanoiden der Fall), ist einem mit einem Roboter, der den Betrachter verstört, nicht viel geholfen.
Viele Entwickler entscheiden sich deshalb bewusst für eine schemenhafte, manchmal gar comic-hafte Gestalt, die uns schon vertraut ist, aber bewusst nicht ähnlich genug, um ins Uncanny Valley zu geraten. An dieser Stelle wollte ich auf ursprünglich auf den iCub verweisen, der für mich ein gutes Beispiel darstellt. Ein Kommentar in meinem Beitrag zum iCub zeigt jedoch, dass es da offenbar deutliche Unterschiede gibt. Simon ist vielleicht ein noch besseres Beispiel.
Und damit komme ich zum ursprünglichen Antrieb für diesen Blogbeitrag: Ein neuer Roboter auf der internationalen Bildfläche der Telenoid R1:
Telenoid R1
Der Roboter ist nicht nur ein humanoider, sondern er ist sogar ausdrücklich zur Kommunikation mit einem Menschen konstruiert. Er ist ein Telepräsenzroboter und damit dafür gedacht, einen Diskussionspartner zu vertreten, der irgendwo auf der Welt in eine Kamera spricht. Der Roboter gibt die Sprache weiter und versucht, die mit der Kamera aufgezeichnete Gesichtszüge und Mimik nachzuahmen.
Die reduzierte Gestalt des Roboters ist Absicht und soll erlauben, dass der Telepräsenzroboter sowohl weibliche als auch männliche, sowohl junge als auch ältere Gesprächspartner repräsentieren kann.
Hier scheint es mir doch deutlich der Fall zu sein, dass die Uncanny-Valley-Empfindung im japanischen Raum entweder eine komplett andere ist oder von dem allgemeinen Robotik-Enthusiasmus schlicht überschrieben wird. Dass jemand 6.000 Euro bezahlt (der geplante Preis bei Markt-Einführung), um sich in einem Gespräch von dem merkwürdig anmutenden Telenoid mit seinen Stummelarmen vertreten zu lassen, scheint mir in westlichen Ländern mindestens unwahrscheinlich. Das Konzept, die Telepräsenz auf die Art und Weise durch die physische Präsenz eines Avatars noch realistischer zu machen, ist mir zwar einleuchtend, aber wer will schon während der Telepräsenz tief im Uncanny Valley sitzen?
Und hier sieht man den Roboter im Einsatz, für mich sieht das nicht nach einer besonders vorteilhaften Gesprächssituation aus:
Demonstration eines Ferngesprächs mit dem Telenoid
Der Telenoid kommt übrigens von dem gleichen Schaffer, Hiroshi Ishiguro, der auch schon für den Geminoid verantwortlich zeichnet, der ähnliche Reaktionen hervorrief.
Lange habe ich keine Linksammlung mehr eingestellt, dafür kommen hier aber ein paar wirklich tolle Artikel der letzten zwei Monate: Ein Interview, religiöse Robotik und ein Staubsaugerroboter in der echten Welt …
Tauchroboter „Ferngesteuerte Roboter […] können zur Erschließung neuer Ölfelder vor den Küsten eingesetzt werden“. Ein Beitrag im aktuellen Kontext der Ölkatastrophe im Golf von Mexiko zum Einsatz von Tauchrobotern, die zwar Vorteile bieten und tiefer tauchen können als Menschen, aber zum Teil auch achtköpfige Bedienungsmannschaften erfordern.Baumarkt in der Tiefe(Süddeutsche, Alexander Stirn, 19. Juni 2010)
Robotik als Religion In der New York Times schreibt Jaron Lanier von der University of Southern California einen Artikel unter dem bezeichnenden Titel The First Church of Robotics, die erste Kirche der Robotik. „The influential Silicon Valley institution preaches a story that goes like this: one day in the not-so-distant future, the Internet will suddenly coalesce into a super-intelligent A.I. […] it will become alive in the blink of an eye, and take over the world before humans even realize what’s happening.“The First Church of Robotics(New York Times, englisch, Jaron Lanier, 9. August 2010)
Haushaltshilfe Für Welt-Online macht Familienvater Clemens Wergin den Test, einen Staubsaugerroboter in die Familie und den Haushalt einzuführen. Ausgesucht hat er sich einen von Samsung, weil dieser der Intelligenteste sei, mit seinem „Visionary Mapping System“ und der „beeindruckende[n] Zahl von Sensoren“. Der Test ist interessant zu lesen, weil er zeigt, wo Roboter nach wie vor scheitern: In der echten Welt, in der Kabel und andere Gegenstände rumliegen und in der der Roboter von Menschen bedient wird, die nicht an der Programmierung beteiligt waren oder geschult wurden. Unterhaltsam zu lesen.Saugroboter – im Bewährungstest knapp gescheitert(Welt Online, Clemens Wergin, 27. Juni 2010)
Interview Der US-Politologe Peter W. Singer (siehe Buch-Review Wired for War) sieht in Militärrobotern eine ähnlich große Veränderung für die Kriegsführung – und eine ähnlich unkalkulierbares Risiko – wie durch die Atombombe. Matthias Kolb führt mit ihm für die Süddeutsche ein Interview.Wenn Roboter das Schlachtfeld übernehmen(Süddeutsche, Matthias Kolb, 12. August 2010)
Google hat die deutsche Firma Microdrones gekauft, die zivile ferngelenkte Drohnen entwickelt. Die Spekulationen schießen seitdem – gerade im Zusammenhang mit der aktuellen StreetView-Debatte – aus dem Boden. Spekuliert wird unter anderem über detailliertere Aufnahmen oder sogar Live-Aufnahmen von wichtigen Plätzen.Google dementiert Berichte über geplanten Drohnen-Einsatz(Spiegel Online, Frank Patalong, 9. August 2010)
Über Hinweise zu lesenswerten Artikeln freue ich mich jederzeit. Entweder per Kommentar oder per E-Mail anbotzeit@ohmpage.org
Der Nao, französischer Fußballroboter und aktuelle Standardplattform in der RoboCup-Fußballliga, soll in Zukunft im Weltall trainieren. Allerdings nicht sich selbst, sondern die dortigen Langzeitastronauten.
Nao
Der Nao soll als Personal Trainer die Langzeitastronauten bei Laune halten und zum täglichen Kampf gegen den Muskelrückgang motivieren. Das zumindest plant das CoR-Lab, Forschungsinstitutes für Kognition und Robotik, in Zusammenarbeit mit dem DLR, dem deutschen Zentrum für Luft- und Raumfahrt.
Das Projekt umfasst sowohl die Analyse von Techniken menschlicher Motivationstrainer als auch die Übertragung der Ergebnisse auf den Roboter. Die Universität Bielefeld hat mit dem CoR-Lab und dem CITEC, dem Exzellenzcluster für kognitive Interaktionstechnologie, die notwendige Expertise, sowohl die Interaktion zwischen Motivationstrainer und -schüler zu verstehen, als auch dies in Technik umzusetzen. Zumindest in dem Rahmen, in dem man dies heutzutage schon mit Roboter machen kann. Zum Einsatz kommen werden dabei wahrscheinlich sowohl der Nao als auch FloBi, ein emotionaler Roboterkopf aus Bielefeld.
Flobi, Roboterkopf mit ausdrucksstarker Mimik
Das Projekt läuft über drei jahre und endet in einem Live-Versuch, in dem mehrere Personen unter medizinischer Aufsicht isoliert werden und über mehrere Wochen unter den Augen der Wissenschaftler vom Nao bespaßt werden und dabei auf ihre Stimmungslage und Trainingserfolge untersucht werden.
Disclaimer: Das CoR-Lab ist mein aktueller Arbeitgeber.
Zurück von der iCub Summer School VVV10, die einfach großartig war. Fast zwei Wochen haben einige dutzend Robotiker aus Europa (sowie einzelne aus den USA und Neuseeland) in einem alten Kirchengebäude in Sestri Levante rund um zwei iCubs gearbeitet, ausprobiert und gelernt. Wie das aussieht und wie die Arbeitsstimmung dort ist, zeigt ein Timelapse-Video eines der Tage:
iCub Summer School 2010, 24. Juli 2010 (Dank an Alexis)
Links im Vordergrund ist ein iCub in schwarzem Gewand aufgebaut (die Roboter sind besser erkennbar, wenn man das Video in HD ansieht), links im Hintergrund der zweite im weißen Gewand. Bereits in den ersten zwei Tagen hatten sich alle Teilnehmer in Gruppen zusammengerauft, die ähnliche Ziele verfolgten und ähnliche Experimente machen wollten und somit in den nächsten Tagen gemeinsam arbeiteten.
Die freie, konstruktive und kollegiale Arbeitsstimmung … das gemeinsame Arbeiten und Lernen mit Wissenschaftler aus aller Welt … das tolle Kongresszentrum nur fünf Schritte vom Meer entfernt … das war eine richtig tolle Summerschool.
Dass ich nicht nur viel über den iCub gelernt habe, sondern auch tolle Gespräche mit den Machern des iCub führen konnte, die mir in den nächsten Tagen viel helfen werden, und dass ich zusätzlich noch eine private Führung durch das IIT (Italien Institute of Technology) bekommen habe, war das Sahnehäubchen. Am IIT durfte ich die Protoypen der Weiterentwicklung des iCub sehen: die tollen neuen Beine (mit eingebauter Federung und Kraftregelung) und neue, kleine und feinfühlige Hände.
Ich freue mich schon auf die nächste Summerschool.
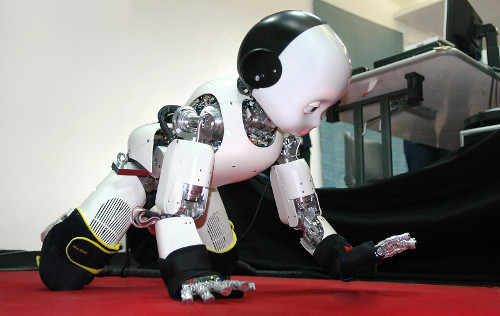
Der iCub ist ein waschechter europäischer Roboter-Spross. Die Vision zu diesem Roboter hatte Giorgio Metta vom IIT (Italien Institute of Technology), der an seinem Institut zusammen mit vielen anderen europäischen Forschungsinstituten im fünfjährigen RobotCub-Projekt das Roboterkind entwickelte.
Die Kleinkind-Gestalt des iCub kommt nicht von Ungefähr. Mit dieser Gestalt trickst man die Kommunikationspartner – den menschlichen Gegenüber des iCub – aus. Zum einen erwarten Menschen instinktiv von einem Kind nicht so viele, komplexe und entwickelte Fähigkeiten wie von einem Erwachsenen. Entsprechend verzeihen wir einem kindlichen Roboter eher die Fehler, die jeder Roboter heutzutage nun einmal noch zuhauf und ständig begeht: Sie verstehen uns nicht, erkennen Objekte in ihrer Umgebung nicht und greifen daneben, wenn sie diese greifen sollen.
Zum anderen bietet die kindliche Gestalt große Vorteile für den Roboter, wenn es darum geht, Fähigkeiten vom Menschen zu lernen. Unbewusst ändern Menschen ihre Sprache, Gestik und Mimik gegenüber Kleinkindern. Sprechen wir mit Kindern, sprechen wir sehr deutlich und sehr betont. Wir achten darauf, Bewegungen langsam und deutlich auszuführen und synchron mit der Stimme auszuführen die gerade die Bewegung oder deren Zweck beschreibt. Und wir zeigen mit unserem Blick ganz deutlich, wo auch das Kind gerade hinsehen sollte, um die Aufgabe zu verstehen. Diesen Effekt, mit dem normalerweise Eltern und Erwachsene Kleinkindern beim Lernen und Verstehen der Welt helfen, macht man sich so zunutze. Ein Vorteil bei der Kommunikation zwischen Roboter und Mensch, den man zumindest heute mit besserer Sensorik und besserer Technik des Roboters noch nicht ausgleichen kann.
Ursprünglich war der iCub nach der Vorlage eines noch kleineren Kindes geplant, herausgekommen ist ein Roboter, der in der Einschätzung zwischen zwei- und dreijährig rangiert. Der Grund ist, dass es Motoren und Getriebe in der Größe und gleichzeitig Leistungsfähigkeit, um den iCub zu tragen, damals noch nicht gab, weswegen man die Größenvorstellung anpassen musste.
Doch auch mit diesem Kompromiss ist der iCub ein wunderbarer Roboter geworden, der im besten Sinne ein langfristiges, europäisches Projekt ist. Die Robotik-Welt beneidet Europa um die langfristige, klare Strategie in der Robotik und der iCub zeigt, warum. Das Projekt lief fünf Jahre und ist seit nunmehr einem Jahr vorüber, aber der iCub macht munter weiter. Überall auf der Welt ist er im Einsatz, wie stetig neue Videos auf Youtube beweisen. Neben den einzelnen Experimenten der (hauptsächlich europäischen) Forschungsinstitute, laufen über die nächsten Jahre weitere große Projekte, die den iCub nutzen und weiterentwickeln: iTALK, Robotdoc, AMARSi, … um nur drei der großen aktuellen Projekte zu nennen.
In sieben Stunden geht’s los nach Italien. Bis zum 28. Juli wird dort die diesjährige iCub Summer School stattfinden. Zehn Tage lang wird sich alles um den iCub drehen und mehrere dutzend Wissenschaftler aus ganz Europa werden zusammenarbeiten um dem iCub neue Fähigkeiten beizubringen oder einfach voneinander zu lernen. Da ich bislang den iCub nur in Simulation bewegt habe, werde ich mich in den ersten Tagen auf das Lernen konzentrieren.
Da die Summer School praktischerweise in der Nähe von Genua ist, habe ich mich außerdem schon für einen Kurzbesuch bei Nikos Tsagarakis am IIT (Italien Institute of Technology) angemeldet und werde an die Summer School noch zwei Tage am IIT ranhängen. Dort werde ich dann die neue Version des iCub sehen, die dort gerade in der Advanced-Robotics -Gruppe entwickelt wird. So bekomme ich dann noch einen konkreteren Einblick in die weitere Zukunft des iCub und kann einige meiner Kollegen aus dem AMARSi-Projekt persönlich kennenlernen, mit denen ich bislang nur per E-Mail Kontakt hatte.
Amy Harmon, Reporterin der New York Times, hat einen Artikel über den Roboter Bina48 geschrieben, einen sprechenden Roboterkopf. Hinter dem Kopf steckt eine künstliche Intelligenz, wie es heißt, und der Roboter soll sich mit seinem Gegenüber in der Art seiner Vorlage Bina Rothblatt, einer lebendigen Person, unterhalten. Was die Reporterin Amy Harmon unter dem vielversprechenden Titel Making Friends With a Robot Named Bina48 („Freundschaft schließen mit einem Roboter namens Bina48“) zeigt, ist für denjenigen, der ein natürliche Kommunikation erwartet, etwas ernüchternd. So auch für die Reporterin selbst, wie in der Aufzeichnung des Interviews erkennbar ist:
Interview mit Bina48 (englisch)
Der Roboter fokussiert seine Gesprächspartnerin nicht, versteht Fragen falsch oder gar nicht, usw. …
Eine natürliche Gesprächssituation zu erzeugen, ist für einen Roboter (bzw. deren Erschaffer) eine unglaublich schwierige Aufgabe. Der Mensch kommuniziert eben in einem Gespräch nicht nur über Sprache, sondern gleichzeitig über viele weitere Kanäle: Gestik, Mimik, Betonung, … entsprechend erwarten wir Menschen in einem Gespräch, auf sämtlichen dieser Kanäle von unserem Gegenüber plausible Signale zu empfangen. Ein Roboter, der mit uns spricht, aber über keine Mimik verfügt, wird niemals natürlich, menschlich wirken. Ein Roboter, der die Betonung nicht variiert, wird niemals Emotionen transportieren oder beim Gegenüber erzeugen können wie es mein Mensch vermag.
Und so sieht man die Schwierigkeiten der Reporterin, mit dem Roboter ein Gespräch zu führen. Schwierigkeiten, die nichtmal inhaltlicher Natur sind. Selbst wenn der Roboter die Frage versteht und eine einigermaßen plausible Antwort erzeugen kann: Wie er dabei wirr umhersieht, immer einen Moment zu lange mit dem Antworten wartet und mangels ausgeprägter Mimik nicht zu erkennen gibt, ob er gerade nachdenkt oder einfach die Frage nicht verstanden hat … all das verwirrt die Reporterin und sorgt mehrfach für ein stockendes Gespräch und gegenseitiges Unterbrechen.
Die Leistungen der Truppe um David Hanson von Hanson Robotics sollten bei alledem aber nicht unterschätzt werden. Der Chatbot Bina48 ist nicht schlecht … die Aufgabe – natürliche, menschliche Kommunikation – ist nur einfach eine unglaublich schwierige. Hier ist man in der Robotik noch ganz am Anfang der Entwicklung (das allerdings schon seit Jahrzehnten) und hat noch zahlreiche ungelöste Fragen vor sich.
Insofern ist Bina48 und dieses Interview einfach als ein weiterer Baustein in dieser Entwicklung zu verstehen und als weiterer Quell neuer Erkenntnisse. Für den Zuschauer macht dieses Interview anschaulich, wie sehr Roboter – bei allen Erfolgen in letzter Zeit – versagen, wenn man sie ins Feld lässt, in die sogenannte unstrukturierte Umgebung. Das ist unsere natürliche Umgebung, die nicht den künstlichen, vereinfachten Laborbedingung entspricht. In diesem Fall eine Reporterin, die einfach nur ein normales Gespräch führen möchte.


{kind=link}