Perseverance ist erfolgeich gelandet und hat bereits erste neue Bilder vom Mars geschickt. Die Landung Live zu verfolgen und dann ein Bild zu sehen, dass in diesem Moment vom nur wenige Minuten zuvor per Sky Crane auf dem Mars abgesetzten Rover gemacht wurde, war schon beeindruckend…
Erste Bilder geschickt von Perseverance [NASA/Bill Ingalls]
In den nächsten Tagen, Wochen, Monaten und Jahren werden noch viele beeindruckende Bilder, dann auch mit höherer Auflösung, folgen.
Das NASA Jet Propulsion Laboratory (JPL) hat heute noch ein wunderbares, 1-minütiges Video zusammengeschnitten, dass die letzten spannenden Minuten zusammenfasst. Zu finden auf twitter:
Heute gegen ca 22:00 Uhr mittel-europäischer Zeit soll der Mars-Rover Perseverance auf dem Mars landen. Der Mars-Rover mit deutscher Beteiligung wird genau wie seine Vorgänger wieder mit einem Sky-Crane gelandet – ein Konzept, dass für mich immer noch völlig verrückt wird, aber das zumindest bei Curiosity schon einmal einwandfrei funktioniert hat.
Auch Perseverance soll wieder mit einem Sky-Crane auf die Oberfläche des Mars heruntergelassen werden.
Schon jetzt läuft umfangreiche Live-Berichterstattung im SPACE-Channel bei Youtube:
Live-Berichterstattung im Youtube-Channel von SPACE mit interessanten Hintergrundinformationen schon Stunden vor dem Start.
Offiziell geht es dann los um 20:15 Uhr im offiziellen Youtube-Channel der NASA:
Die offizielle Live-Übertragung der NASA
Einen deutschen Stream gibt es ab 20:30 Uhr vom Planetarium Berlin:
Die Landung ist für 21:43 Uhr mitteleuropäischer Zeit geplant, spannend wird es aber wohl schon etwas früher, wenn das Raumschiff mit fast 20.000 Kilometern pro Stunde auf die Atmosphäre trifft. Landen soll der Rover im Jezero-Krater, da die dortige Geologie nur mit der Existenz von Wasser erklärbar wäre. Im vermuteten Jezero-Kratersee soll es vor rund 4 – 3,8 Milliarden Jahren wahrscheinlich noch offene Wasserflächen gegeben haben.
Wegen der der großen Signal-Laufzeiten, eine knappe Viertelstunde wegen den aktuell 200 Millionen Kilometern zwischen Mars und Erde, kann die NASA während der komplizierten Landung nicht steuernd eingreifen. Stattdessen hat Perseverance als erster Mars-Rover eine nach unten gerichtete Kamera, um während des Landung Anflugs selbstständig den Boden zu scannen und die beste Stelle für eine Landung zu bestimmen. In der Zwischenzeit hilft nur Warten und Daumendrücken: dass die Hitzeschild halten, dass der Bremsfallschirm rechtzeitig aufgeht, die Bremsraketen und Landeinstrumente funktionieren, …
Aufmerksam geworden bin ich auf das folgende Experiment, da es mir im Internet vielfach unter Schlagzeilen wie „mit LEGO einen Mars-Rover bauen“ begegnete. Auch wenn diese Schlagzeile irreführend ist, ist das Video nicht weniger interessant.
Der Bastler des Experiments, der Brick Experiment Channel, probiert hintereinander viele verschiedene, komplexer werdende Gestalten (Kinematiken) eines mobilen Roboters aus. Während die erste Ausbaustufe noch an einem einfachen Buch als Hindernis scheitert, klettert der Roboter in seiner finalen Form über Bücherstapel und an Überhängen hoch:
Das Video zeigt nicht nur sehr schön, wie sich durch schnelles Experimentieren und Ausprobieren – Rapid Prototyping – die Kinematik eines Roboters für seine Aufgabe entwickeln lässt. Sondern es zeigt außerdem, wie wichtig die Gestalt eines Roboters ist. So werden durch relativ kleine Änderungen der Kinematik (größere Räder, ein zusätzliches Gelenk, ein zusätzlicher Motor) Aufgaben möglich, die vorher undenkbar oder sehr kompliziert gewesen wären. Wer in diesen Kaninchenbau hinab steigen will, dem sei der Suchbegriff „morphological computation“ empfohlen. Dahinter verbirgt sich eine Disziplin, die erforscht, welchen Einfluss die Gestalt eines Lebewesens oder einer Maschine auf dessen Bewegungsfähigkeit oder sogar dessen kognitive Prozesse hat.
Heute also soll es soweit sein und der neue Mars-RoverPerseverance soll um 13:50 Uhr mittel-europäischer Zeit in Richtung Mars aufbrechen. Der umgerechnet 2,2 Milliarden Euro teure Roboter ist der komplexeste Roboter, der bislang zum Mars geschickt wurde. Er hat neben viel eigener Sensorik auch die kleine Helikopter-ähnliche Drohne Ingenuity mit an Bord.
Untersuchen bzw. finden sollen die beiden … natürlich … Spuren von (mikrobakteriellem) Leben. Aber sie werden auch das Mars-Klima und die Geologie des Mars‘ untersuchen. Die Landestelle wurde übrigens mit deutscher Beteiligung ausgewählt. In die Auswahl sind Bilddaten und die daraus berechneten Geländemodelle der hochauflösenden DLR-Stereokamera HRSC der früheren ESA-Mission Mars Express eingeflossen. Die Expertise des DLR nutzt die NASA auch bei dieser Mission wieder, nämlich in der Mastcam. Die Mastcam ist ein panoramisches und stereoskopisches Kamerasystem mit Zoomobjektiv. Neben vielen anderen Partnern ist daran auch das Deutsche Zentrum für Luft- und Raumfahrt (DLR) und die österreichische Joanneum Research GmbH beteiligt.
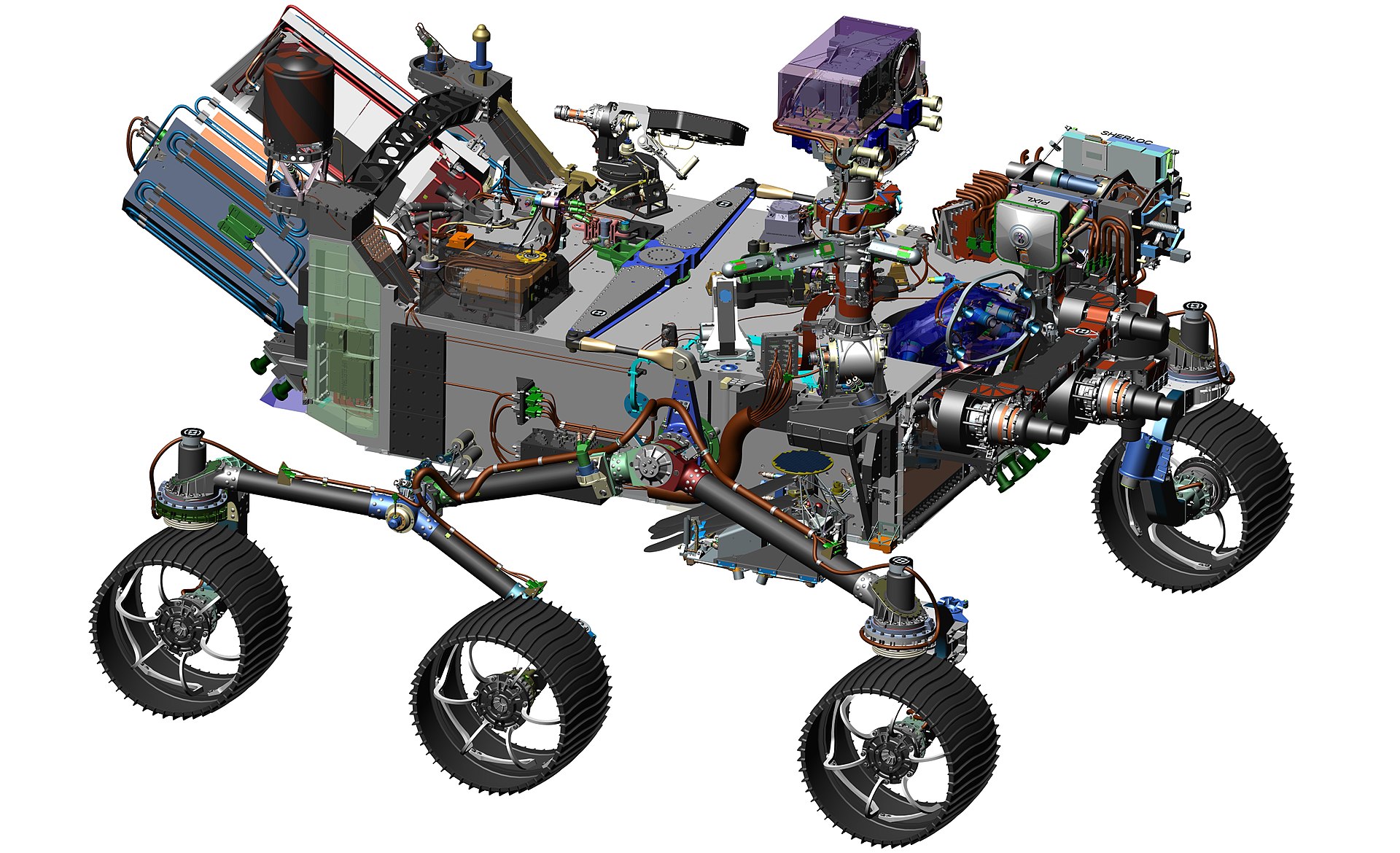
Um die lange Wartezeit bis zur Landung im Februar 2021 zu überbrücken, hat die NASA auf ihrer Website ein wunderbares 3D-Modell von Perseverance zur Verfügung gestellt, das sich auf beliebigen Websites einbinden lässt … also auch hier:
Eine noch coolere Version dieses 3D-Modells hat die NASA übrigens auf ihrer Website. Dort kann man nicht nur den Rover von allen Seiten begutachten, sondern ein Click auf das entsprechende Bauteil gibt Hintergrundinformationen dazu preis. Zu sehen gibt’s das hier: NASA – Learn About the Rover.
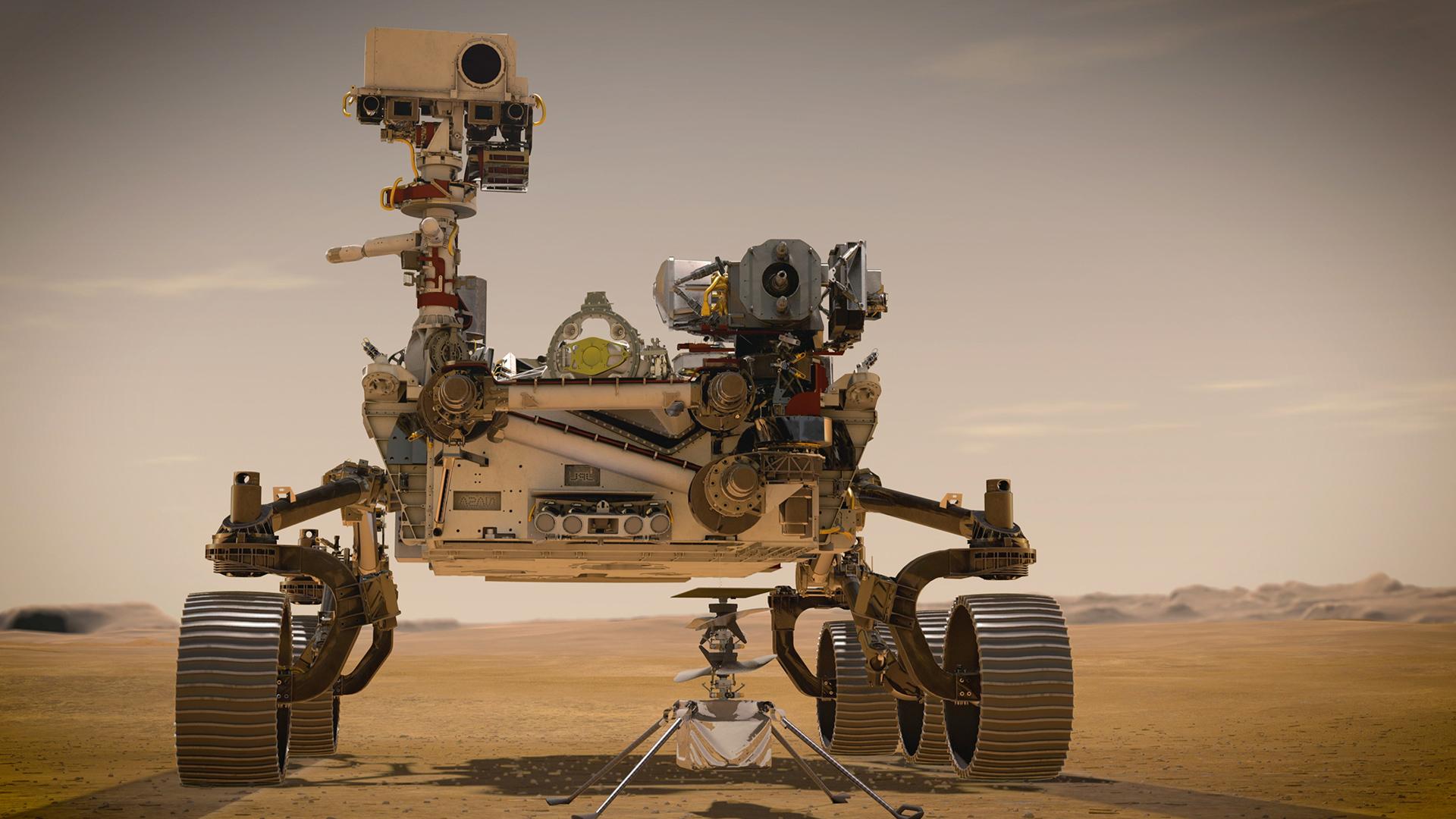
Im März hatte ich im Rahmen der öffentlichen Namensfindung schon über den neuen Mars-Rover Perseverancegeschrieben. Übermorgen, am 30. Juli, soll er sich jetzt endlich auf den Weg zum Mars machen – mit deutscher Beteiligung. Der Rover ist mit seiner umfangreichen Sensorik an sich schon recht komplex, trägt aber zusätzlich noch eine kleine Hubschrauberdrohne mit sich, die Erkundungsflüge auf dem Mars unternehmen soll:
Mars-Rover “Perseverance” und Hubschrauberdrohne “Ingenuity” [NASA/JPL-Caltec]
Übermorgen, am 30. Juli 2020 um 13:50 Uhr mittel-europäischer Zeit, soll es von Cape Canaveral losgehen. Auf die Landung und den ersten Einsatz des Rovers müssen wir noch etwas warten: das ist für den 18. Februar 2021 geplant.
Wie schon bei vorigen Missionen wie Mars Express, Dawn, MASCOT/Hayabusa2 und Philae/Rosetta hat auch diese Mission wieder deutsche Beteiligung an Bord: an der Verarbeitung der Bilder der Stereokamera Mastcam-Z sind Forscher des Berliner Deutschen Luft- und Raumfahrtzentrum (DLR) beteiligt. „Die beiden wissenschaftlichen Augen von Perseverance zur räumlichen Orientierung und mineralogischen Analyse befinden sich am ‚Kopf‘ des Rovers auf dem markanten Mast“, erklärt Frank Preusker vom DLR-Institut für Planetenforschung. Die im Kopf enthaltene Kamera kann mit maximalem Zoom bei einzelnen Aufnahmen Objekte von „der Größe einer Stubenfliege über die Länge eines Fußballfeldes hinweg sichtbar machen“. Insgesamt hat Perseverance sogar über 23 Kameras an Board, mehr als jede andere Mars-Mission bisher.
Zusammen werden die Kameras von Perseverance in der Lage sein, 360-Grad-Panoramen in 3D und in Farbe zu liefern. Auf die können wir uns also ab Februar 2021 freuen!
Der Name ist bekannt! Geworden ist es: Perseverance (Ausdauer, Beharrlichkeit).
Bei dem Wettbewerb zum Namen des Marsroboters haben über 770.000 Abstimende mitgemacht. Gewonnen hat schließlich der Aufsatz des Siebtklässlers Alex Mather aus Springfield, Virginia, der 28.000 Stimmen erhielt:
Curiosity. InSight. Spirit. Opportunity. If you think about it, all of these names of past Mars rovers are qualities we possess as humans. We are always curious, and seek opportunity. We have the spirit and insight to explore the Moon, Mars, and beyond. But, if rovers are to be the qualities of us as a race, we missed the most important thing. Perseverance. We as humans evolved as creatures who could learn to adapt to any situation, no matter how harsh. We are a species of explorers, and we will meet many setbacks on the way to Mars. However, we can persevere. We, not as a nation but as humans, will not give up. The human race will always persevere into the future.
Alexander Mather
Schwer pathetisch, aber das kennt man ja aus Hollywood.
Noch für gut einen Tag (zum Zeitpunkt des Schreibens 1 Tag und gute 9 Stunden) darf man bei der NASA über den Namen des Mars-Roboters für die Mission Mars2020 abstimmen. Zur Auswahl stehen die Namen TENACITY (Beharrlichkeit), CLARITY (Klarheit), INGENUITY (Einfallsreichtum), PROMISE (Versprechen), FORTITUDE (Tapferkeit), VISION, PERSEVERANCE (Ausdauer), ENDURANCE (Ausdauer) und COURAGE (Tapferkeit). Hier geht’s zur Abstimmung!
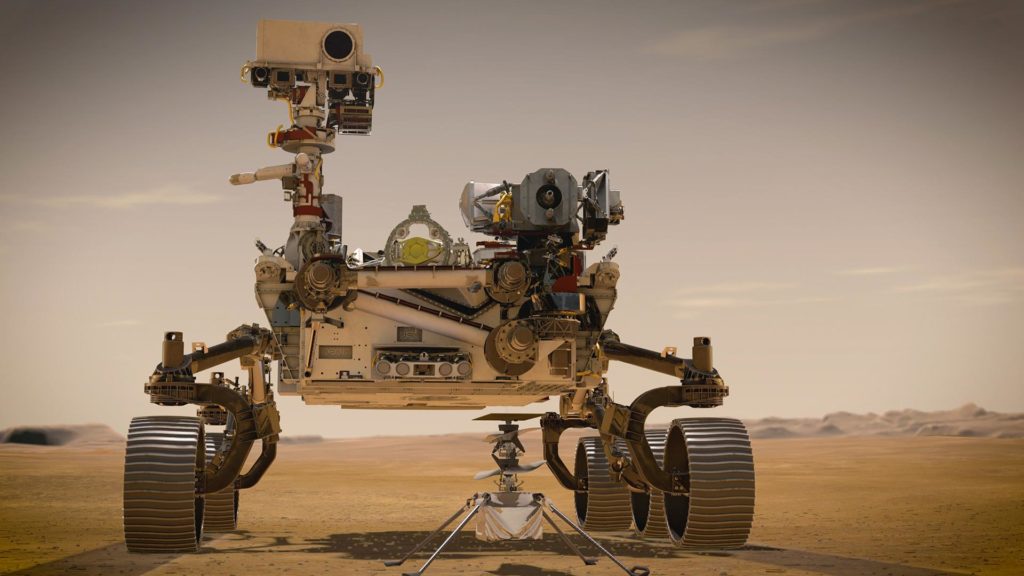
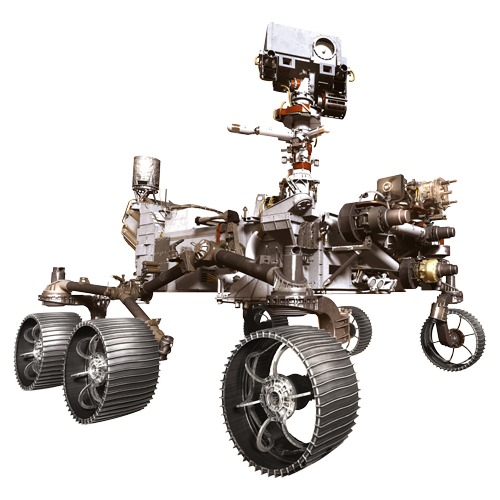
Der Roboter soll zwischen dem 17. Juli und 5. August 2020 von der Cape Canaveral Air Force Station in Florida starten und voraussichtlich am 18. Februar 2021 im Jezero Crater auf dem Mars landen. Vorausgesehen ist eine Missionsdauer von mindestens einem Mars-Jahr (ungefähr 687 Tage auf der Erde). Und so sieht er aus:
Mars-Roboter für Mars 2020 [Quelle: NASA]
Ich denke, ich muss Euch nicht sagen, dass es nur eine offensichtlich richtige Antwort gibt.
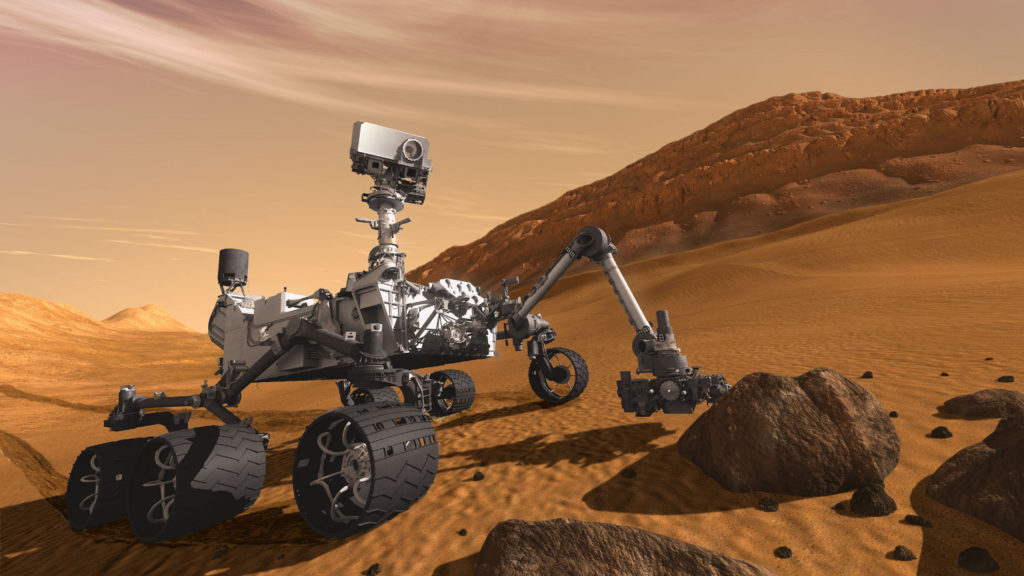
Die aktuelle Mars-Mission Mars Science Laboratory (MSL) und ihr Curiosity-Rover treten ein großes Erbe an, die Vorgänger-Mission um die Rover Opportunity und Spirit hat sämtliche Erwartungen übertroffen und ihre geplante Missionszeit pulverisiert.
Das ist besonders aufgrund der widrigen Umstände von Marsmissionen imposant. Eine der großen Schwierigkeit der Mars-Missionen ist die große Entfernung zwischen Kontrollzentrum und den Robotern, die eine Verzögerung der Kommunikation von mehreren Minuten bedingt. Die Roboter müssen daher über einen hohen Grad an Autonomie verfügen, um über eine gewisse Zeitspanne den grob vorgegebenen Zielen selbstständig folgen zu können; und das in einer in großen Teilen noch unbekannten und unwirtlichen Umgebung. Die Leistung der Rover ist also kaum hoch genug einzuschätzen.
Eines der spannendsten und anforderndsten Teile der jetzt (an)laufenden Mission dürften allerdings bereits die ersten Minuten nach Eintritt sein:
Curiosity's Seven Minutes of Terror
Wie Ingenieur Adam Stelzner zu Anfang des Videos zurecht sagt: Die Pläne zur Landung des Rovers sehen absolut verrückt aus. Curiosity’s Seven Minutes of Terror (Curiosity’s schreckliche sieben Minuten) nennen die Ingenieure die Tatsache, dass die Landung sieben Minuten dauert, die Information darüber allerdings erst vierzehn Minuten auf der Erde eintrifft. Wenn das Kontrollzentrum das Signal über Eintritt in die Atmosphäre erhält, ist der Rover also entweder bereits heile auf dem Mars gelandet, oder schon seit sieben Minuten auf dem Mars zerschellt. Die komplizierte Landung wird notwendig aufgrund der Größe des neuen Rovers (siehe Größenvergleich rechts).
Es wird also spannend, morgen früh ab ca. 7 Uhr mitteleuropäischer Zeit. Nicht nur wegen der besonders komplizierten Landung, die Erfolgsbilanz der bisherigen Marsmissionen ist mit nur 15 geglückten von 39 Marsmissionen ohnehin nicht so gut. 1
Gut verfolgen lässt sich der Missionsverlauf einerseits über die offiziellen Seiten wie zum Beispiel die zur Mission Mars Science Laboratory der NASA. Aber auch die deutschsprachige Wikipedia hat einen tollen Artikel mit fantastischen Bildern und Illustrationen und das Jet Propulsion Laboratory der NASA teilt schon seit Tagen faszinierende Informationen, Bilder und Videos bei Facebook in Vorbereitung des Finals.
Isaac Asimov ist bekannt für seine drei Roboter-Gesetze, die er 1942 in seiner Geschichte Runaround erstmals erwähnte:
Ein Roboter darf kein menschliches Wesen wissentlich verletzen oder durch Untätigkeit gestatten, dass einem menschlichen Wesen (wissentlich) Schaden zugefügt wird.
Ein Roboter muss den ihm von einem Menschen gegebenen Befehlen gehorchen – es sei denn, ein solcher Befehl würde mit Regel 1 kollidieren.
Ein Roboter muss seine Existenz beschützen, solange dieser Schutz nicht mit Regel 1 oder 2 kollidiert.
Noch sind Roboter (ist die künstlich Intelligenz) noch nicht weit genug, dass sie eigene Entscheidungen treffen. Diese Gesetze sind also nach wie vor rein fiktional. Mit den Fortschritten in der Robotik und der künstlichen Intelligenz der letzten Jahre … nein … mit den absehbaren Fortschritten in den nächsten Jahren … nein … mit den möglichen, zukünftigen Fortschritten in dem Bereich der künstlichen Intelligenz kann es Sinn machen, diese Regeln für ihren realen Einsatz vorzubereiten, meint David Woods, Robotiker an der Ohio State University. Er sagt, die zunehmende Faszination für immer eigenständigere Roboter führt mitunter dazu, dass ihnen mehr und mehr Entscheidungen überlassen werden – was böse Folgen haben kann.
Woods und seine Kollegen schlagen daher eine Abwandlung der drei Asimov-Regeln vor, die den Schaffer mehr in die Verantwortung nimmt. Frei übersetzt:
Menschen dürfen keine Roboter einsetzen, die nicht die höchsten rechtlichen und fachlichen Standards bzgl. Sicherheit und Ethik mitbringen. („[…] says that humans may not deploy robots without a work system that meets the highest legal and professional standards of safety and ethics.“)
Roboter müssen Menschen gemäß ihrer Stellung gehorchen. Es gibt eine Gruppe von Menschen von denen Roboter Befehle entgegennehmen. („[…] requires robots to respond to humans as appropriate for their roles, and assumes that robots are designed to respond to certain orders from a limited number of humans.“)
Roboter sind selbstständig genug, um ihre eigene Existenz zu schützen, solange dies nicht mit Regel 1 oder 2 kollidiert. („[…] proposes that robots have enough autonomy to protect their own existence, as long as such protection does not conflict with the first two laws and allows for smooth transfer of control between human and robot.“)
Woods empfiehlt außerdem, dass sich Robotiker in dieser Hinsicht an der NASA orientieren sollten, die z. B. Regel 3 schon erfolgreich einsetzt. Die Marsrover sind nur begrenzt selbstständig, in dem Sinne, dass sie jeden Tag erneut die Anweisungen entgegennehmen, was sie als nächstes zu tun haben. Sie sind aber selbstständig genug, über keine Klippe zu fahren, solange die NASA-Ingenieure ihnen nicht die explizite Anweisung dazu geben. Dies dürfte unter Anderem daran liegen, dass sich die NASA nicht leisten kann, mit ihren Robotern unvorsichtig umzugehen. Sei es, ihnen zu viel Kontrolle zu überlassen und diese gegebenenfalls zu verlieren, oder sei es, ihnen zu wenig Kontrolle zu überlassen und damit zu riskieren, dass sie versehentlich von den NASA-Ingenieuren ins Verderben manövriert werden. Man wird eben vorsichtiger im Umgang mit Robotern, wenn Reparatur oder Ersatz mehrere Millionen Kilometer und Milliarden Dollar entfernt sind.