Nach dem groß angekündigten Tischtennismatch zwischen einem KUKA-Roboter und Timo Boll hat Jörn 2014 hier im Blog einen erbosten Kommentar geschrieben. Das angekündigte Match stellte sich nämlich leider als ziemlich trauriger Marketing-Stunt heraus, bei dem außer schnellen Kameraschnitten und CGI nicht viel zu sehen war.
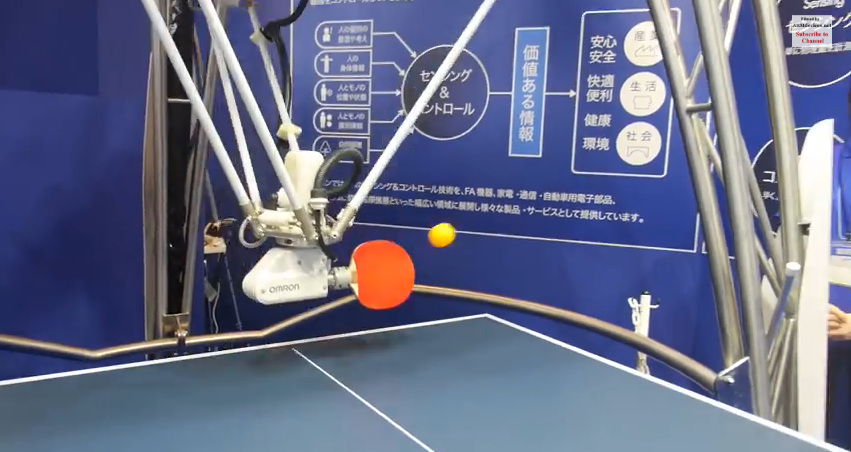
Dass es auch anders geht, zeigt der Roboterhersteller Omron in disem Jahr wieder auf der CES 2020 in Las Vegas:
Das Spiel kann sich durchaus sehen lassen, finde ich. In einem Video aus dem letzten Jahr kann man sogar sehen, wie der Roboter im Zusammenspiel mit einem klassischen Roboterarm einen recht ansehnlichen Aufschlag macht (ab 0:30):
Im Hintergrund ist auf dem Monitor zu sehen, wie die ganze Zeit nicht nur der Ball von Kameras getrackt wird, sondern auch die Pose des menschlichen Mitspielers. In den Videos ist auch zu sehen, wie nützlich dabei auch die Bauart ist. Delta-Roboter sind für ihre flinken uns präzisen Bewegungen bekannt. Siehe dazu auch unseren Beitrag aus dem Jahr 2009: 400 pancakes per minute.
Diese Roboter baut Omron natürlich nicht für’s Tischtennisspielen allein. Das ist lediglich eine ziemlich coole Attraktion, um die Fähigkeiten des Roboters auf Messen zu zeigen (und vielleicht auch eine kleine Spitze gegen KUKA?). Wenn der Omron-Roboter nicht gerade mit Tischtennis beschäftigt ist, ist sein Einsatzgebiet nämlich Pick & Place. Ein klassisches Aufgabenfeld für Delta-Roboter, bei dem ähnliche Fertigkeiten gefordert sind, siehe Adept Quattro: Fünf pro Sekunde. Der Roboter in dem verlinkten Artikel ist übrigens von Adept, die 2015 von Omron aufgekauft wurden.
… drei Wissenschaftler aus der Abteilung Advanced Robotics des IIT in Genua. Sie saßen des Morgens beim Kaffee und entwickelten diese Idee. Die Idee von einer Weihnachtsgeschichte, in der die am IIT entwickelten und eingesetzten Roboter die Protagonisten darstellen:
Youtube-Video: A Robot Christmas Story
Unter den Kollegen fand die Idee großen Anklang. Schnell wurden Meetings angestzt, um die Geschichte auszuarbeiten und zu verfeineren. Die Kollegen von der Medienabteilung wurden hinzugezogen um technische Details zu klären. Schließlich wurden Requisiten gekauft und Zeitslots für die Roboter reserviert, so dass wir die Dreharbeiten parallel oder gar im Anschluss zum ganz normalen Projekt- und Forschungsalltag durchführen konnten.
Wie Ihr im Making of sehen könnt, hatten wir dabei viel Spaß, auch wenn nicht immer alles so auf Anhieb geklappt hat:
Youtube-Video: The making of...
In diesem Sinne allen Lesern frohe Feiertage und einen guten Start ins neue Jahr!
Eine Woche ist es her, seit der DARPA Robotics Challenge (DRC). Noch am Abend des zweiten Wettkampftages haben wir Walkman wieder verpackt und auf den Heimweg geschickt. Anschließend hatten wir Zeit, Schlaf nachzuholen, ein wenig Californien zu erkunden und die DRC-Woche Revue passieren zu lassen.
In der Tat, es ist nicht bei den zwei gestürzten Robotern während des Testlaufs geblieben. Am ersten Wettkampftag sind nahezu alle Zweibeiner früher oder später gestürzt. Jemand hat sich die Mühe gemacht einige der Stürze in einem Video zusammenzufassen:
Stürzende Roboter, via IEEE Spectrum
Etwa ab Sekunde 00:19 ist Walkman zu sehen. Die Aufnahme zeigt unseren ersten Lauf in der zweiten Gruppe am Freitag Morgen. Innerhalb von acht Minuten und zwölf Sekunden hatte Walkman den Polaris Ranger von der Startlinie durch den Parcours zu Eingangstür der simulierten Industrieanlage gefahren und damit den ersten Punkt geholt. Wie im nachfolgenden Video ab Sekunde 50 zu sehen, wurde Walkman dabei kräftig angefeuert.
Walkman’s erster Lauf, angefeuert von seinem Team
Zu diesem Zeitpunkt hatte Walkman zunächst die beiden Atlas Teams, die offenbar technische Schwierigkeiten hatten, weit hinter sich gelassen. Doch dann standen plötzlich für mehrere Minuten auf allen vier Bahnen sämtliche Roboter still. Offenbar gab es bei allen Teams Probleme mit der Kommunikation zwischen den Piloten und dem Roboter. Die Verzögerungszeit auf allen Bahnen wurde daher an die Wettkampfzeit angehängt. Allerdings zehrten die Roboter während dieser Zeitspanne weiterhin von ihren Batterien…
Als es weiterging, öffnete Walkman problemlos die Tür und setzte an, die diese zu durchschreiten. Wir hatten dies in unserer Garage mehrfach geübt. Aufgrund der sehr breiten Schultern des Roboters (ca. 80 cm), ist das Durchschreiten der Tür nicht ganz einfach. Die Strategie bestand also in einer Drehung des Roboters auf der Stelle um 90°. Anschließend passierte Walkman die Tür mit Seitwärtsschritten. Leider brach Walkman unmittelbar nach dem Öffnen der Tür plötzlich einfach zusammen (siehe Video). Glücklicher Weise hat sich Walkman bei diesem Zusammenbruch quasi abgerollt, sodass nichts passiert ist. In der Tat ist von diesem Sturz kaum ein Kratzer zu sehen.
Die Ursache für den Zusammenbruch ist nicht klar. Die Batteriekapazität lag noch bei 80 %. Faszinierender Weise stürzte exakt zur gleichen Zeit auf der Roboter auf der Nachbarbahn. Bei einem Sturz schaltet das Team den Roboter per Funk über einen sogenannten E-Stop Schalter aus, um weitere Schäden zu vermeiden und eine sichere Annäherung an den Roboter zu ermöglichen. Da ein Übersprechen zwischen den E-Stops beider Teams nicht ausgeschlossen werden konnte, gewährte uns die Wettkampfleitung freundlicher Weise eine Wiederholung des Laufs ab dem Zeitpunkt der Kommunikationspanne. Das bedeutet, wir durften am Abend des gleichen Tages noch einen Versuch unternehmen. Der Versuch startete an der Stelle vor der Tür mit der uns am Morgen an dieser Stelle noch verbliebenen Zeit. Dieses mal gelang es die Tür zu durchschreiten. Leider geriet Walkman unmittelbar auf der anderen Seite der Tür ins Straucheln, fiel mit lautem Scheppern auf die Seite und drehte sich anschließend auf die Frontseite. Er kam auf den Knien und dem Schutzkäfig am Kopf jenseits der Türlinie zum liegen. Damit hatten wir dann immerhin unseren zweiten Punkt geholt.
Die am Roboter angebrachten Polster haben auch bei diesem Sturz schlimmeres Verhindert. Eine Schraube zur Befestigung des Ellenbogen Polsters war deutlich verbogen. Diese Schraube hatte beim Aufprall ein Loch im Asphalt der Wettkampfbahn hinterlassen. Darüber hinaus war dem Roboter scheinbar nichts ernstes passiert. Dennoch wurden einige Rekalibrationen erforderlich, die wir dann bis in die Nacht hinein durchführen mussten.
Am nächsten Morgen ging es dann nach einem kurzen Testlauf in der Garage zum zweiten Wettkampflauf. Beim Fahren des Polaris Rangers konnte Walkman die Zeit vom Vortag nahezu halbieren. Vor der Tür begannen dann leider wieder die Schwierigkeiten. Zuerst machte sich ein Rattern während der Bewegung des linken Ellenbogengelenks bemerkbar. Während des Drehens auf der Stelle vor der Tür berührte Walkman den Türrahmen und geriet zunächst gefährlich ins Wanken. Wenige Minuten später mussten wir letztendlich Walkmans letzten Sturz des Wettkampfs mitansehen… Dieses Mal hat sich Walkman wohl das Fußgelenk verknackst…
Schade ist, dass wir nach so kurzer Zeit und einem so guten Start in den zweiten Wettkampftag dann doch so früh abbrechen mussten. Dennoch herrscht Einigkeit im Team und auch so manch anderer bekannter Robotiker in Fairplex hat uns das bestätigt: angesichts der kurzen Entwicklungszeit haben wir einen für den Wettkampf ernstzunehmenden Roboter präsentiert, eine gute Leistung gezeigt und sind damit doch sehr weit gekommen. Wir haben zwei Punkte geholt und haben so mit dem 17. Platz immerhin sechs weitere Teams hinter uns gelassen. Das Technologiekonzept scheint also prinzipiell zu stimmen, am Reifegrad der Technologie dürfen wir noch arbeiten. Da der Roboter von der ersten Schraube bis zum letzten Softwarebit selbst entwickelt worden ist, können wir alle gelernten Lektionen auch unmittelbar umsetzten.
Als Fazit war die Woche für jeden vons eine großartige Erfahrung und anders als bei vielen der anderen Teams stellt die Teilnahme an dem Wettkampf nicht das Projektfinale dar. Für das Team Walkman war dies nur ein früher Meilenstein nach einem Drittel der Projektzeit.
Hier noch ein paar Eindrücke von unseren Vorbereitungen in der Garage:
Team Walkman bei den Vorbereitungen
sowie den Wettkampftagen:
Team Walkman beim Wettkampf
Und da es offensichtlich noch Bedarf zur Nachbesserung in Sachen Balance gibt, begann Team Walkman sogleich mit einem passenden Aufbauseminar… am Strand von San Diego
Nachhilfe in Sachen Balance am Strand von San Diego
Das war’s. Das Team Walkman dankt allen, die die Daumen gedrückt und uns angefeuert haben!
Heute durften alle Teams auf dem Wettkampfgelände einen vollständigen Testlauf durchführen. Nach einigen Hardware-Problemen wie einem kaputten Magnetencoder im rechten Knie und einem defekten Ladewiderstand gab es bei dem heutigen Testlauf auf dem Wettkampfparcours schließlich noch Probleme mit einem launigen On-board Switch…
Der Wettkampfparcours. Insgesamt finden vier Läufe gleichzeitig statt.
Immerhin besteht die Chance, dass Team Walkman damit den Vorrat an Pech verbraucht hat und morgen ein glückliches DRC Finale bevorsteht!
Ein hübsch rundes Loch ist das da geworden.Der Versuch eine Tür zu öffnen.
So wie es aussieht haben bei dem heutigen Testlauf insgesamt 12 von 25 Teams nicht einen einzigen Punkt geholt. Bei manchen lief es einfach nicht gut, andere Teams wollten vor dem eigentlichen Wettkampf wohl nicht zu viel riskieren. Zwei Teams sind bereits ausgeschieden. Zwei Roboter sind heute während des Testlaufs gestürzt und es werden wohl nicht die letzten gewesen sein… Es wird also spannend!
So, nach nunmehr drei Tagen am Austragungsort der DARPA Robotics Challenge in Pomona mit viel zu viel Fastfood und wenig Schlaf nehme ich mir die Zeit ein paar Eindrücke über botzeit zu teilen.
Zum Hintergrund des Walkman Projekts
Der Roboter ist 1.85 groß und wiegt etwa 120 kg. Der gesamte Roboter wurde in nicht mehr als 10 Monaten entwickelt, gefertigt und erstmalig in Betrieb genommen. Als ich im Januar in Genua ankam, steckten die extern gefertigten Teile noch in der Zollabfertigung fest…
Als schließlich alle Teile im Institut angekommen waren, wurde der Roboter binnen zwei Wochen zusammengebaut und in Betrieb genommen. Zu diesem Zeitpunkt blieb uns für die Fertigstellung der Qualifikationsvideos für die DRC Finals dann noch ein knapper Monat Zeit.
Auch nach der Qualifikation blieb nicht viel Zeit zum Durchatmen. Während der Qualifikationsexperimente hatten sich ein paar Tücken sowohl in der Hardware, wie auch in der Software offenbart. Alles andere wäre vermutlich auch sehr überraschend gewesen…
Am vergangenen Samstag sind wir schließlich hier in Pomona nahe Los Angeles angekommen und bereiten uns seither auf den Wettkampf vor.
Ein Blick in die Garage von Team Walkman
Eine Art Tagebuch
Sonntag: Registrierung, Begrüßung und Instruktionen
Der Sonntag Vormittag dient im Wesentlichen der Orientierung hier vor Ort. Es ist das einzige Zeitfenster, in dem wir einen kurzen Blick auf die Gegend um Los Angeles erhaschen und einige wenige Sehenswürdigkeiten besuchen können. Nach der Registrierung am Nachmittag findet dann die offizielle Begrüßung und Auftaktveranstaltung statt. Ein kurzer Überblick über die Daten und Fakten zum Event: es sind etwa 600 Team-Mitglieder angereist, betreut wird die Veranstaltung von 300 freiwilligen DARPA-Mitarbeitern. Zahlreiche internationale Pressevertreter haben sich angekündigt. Darunter unter anderem: ARD, BBC News, Daily Planet, IEEE Spectrum, MIT Technology Review, NBC News, Playboy.com, Spiegel Online, TEDx, ZDF.
Montag: der Einzug in die Team Garage
Wir bekommen ab 08:00 Uhr Zugang zu unserer Team Garage. Das ist der Ort, wo wir unsere Rechner, unsere Werkstatt, den Roboter und eine kleine Trainingsumgebung aufbauen.
Wir verbringen den ganzen Tag weitestgehend mit dem Einzug, dem Aufbau der Arbeitsplätze und ausgiebigen Tests des Roboters. Die beste Nachricht des Tages: Walkman ist gesund und munter angekommen. Der Roboter funktioniert einwandfrei. Auch das restliche Equipment hat den Transport unbeschadet überstanden.
Für die meisten endet dieser erste Tag etwa um Mitternacht mit dem Rückweg zum Hotel.
Dienstag: Modultest
Um 09:00 Uhr geht es für mich weiter. An diesem Tag steht Lokomotion im Fordergrund. Wir sind unsicher, wie Walkman mit dem unebenen Wettkampfgelände und vorhandenen Steigungen zurecht kommen wird. Entsprechend werden nach dem Transport einige Modellparameter überprüft und rekalibriert sowie Reglereinstellungen verfeinert.
Am Nachmittag können wir erstmalig den Roboter in eines der von der DARPA für den Wettkampf zur Verfügung gestellten Autos setzen und unsere Fahrzeugmodifikationen für diese Aufgabe testen.
Walkman im Auto
Anschließend haben sowohl Roboter als auchTeam einen offiziellen Fototermin.
Team Walkman (theroboticschallenge.org)
Am Abend geht es weiter mit Lokomotion. Eine Holzplatte und ein paar Balken dienen dienen als Testplattform. Wir testen das Stehen, Laufen und Drehen auf der Stelle auf der hölzernen Ebene mit bis zu 8° Grad Neigung. Der Roboter meistert die Tests und wir beenden unsere Arbeit sehr zufrieden um 03:00 Uhr am Morgen. Wir werden von den Jungs abgelöst, die nun das Autofahren testen werden. Die Kollegen vom IHMC haben uns freundlicherweise zu diesem Zweck bis 11:00 Uhr ihren Polaris Ranger überlassen. Mille mille grazie dafür!
Mittwoch: Manipulation Day Öffnen und Durchschreiten der Tür, Ventil-Aufgabe
Heute steht Manipulation auf der Tagesordnung. Im speziellen das Öffnen und Durchschreiten einer Tür, sowie das Drehen eines Industrieventils. Bei den Arbeiten bereitet uns das linke Kniegelenk Probleme. Einer der Magnetencoder versagt den Dienst. Am Morgen war bereits ein Fehler in der Leistungselektronik aufgetreten. Mir gibt der Ausfall die Zeit, diese Zeilen zu schreiben, während unsere Techniker daran arbeiten, nicht nur das defekte Teil zu ersetzen, sondern auch die Ursache für den Ausfall festzustellen…
Die Atmosphäre in der Garage:
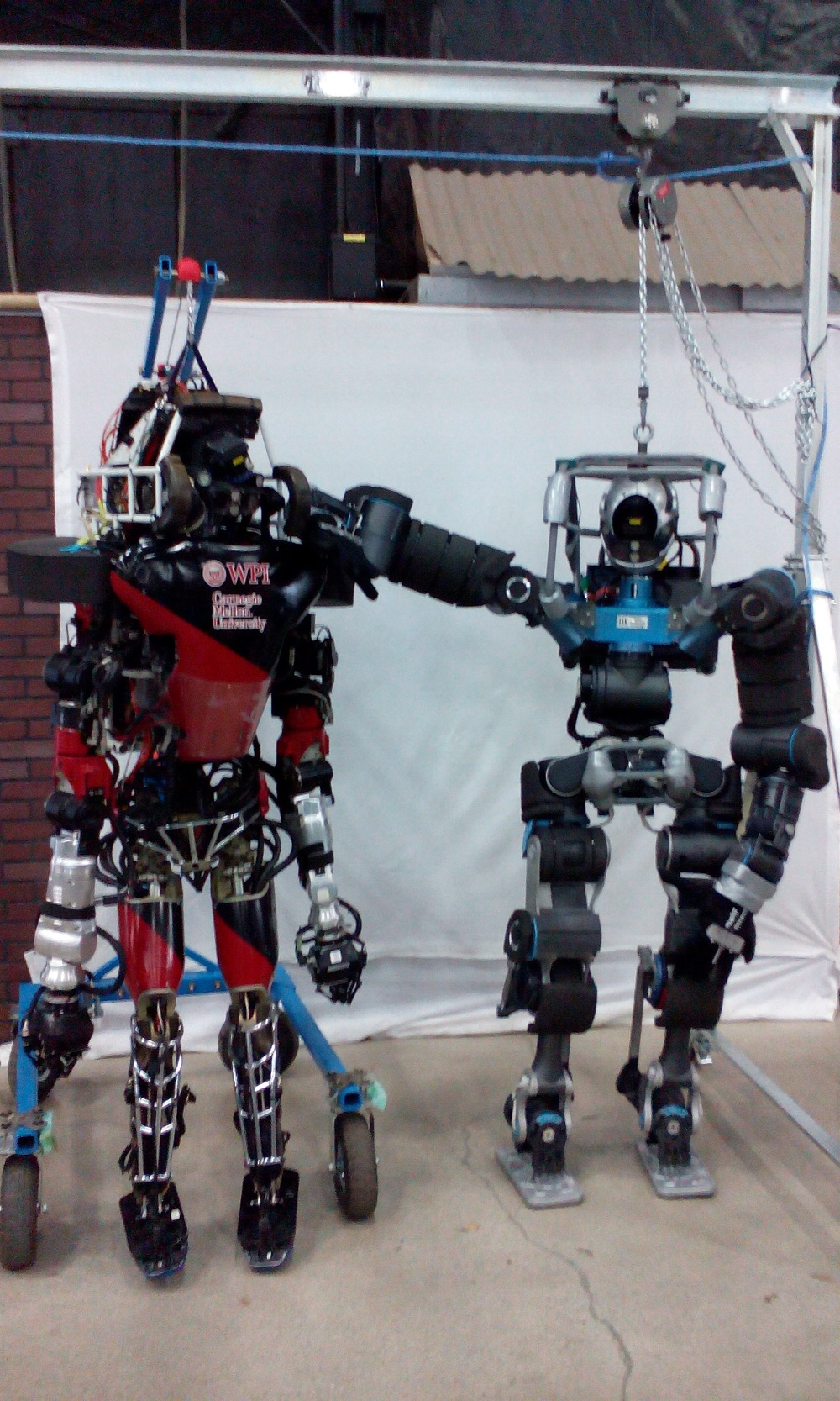
Insgesamt ist die Atmosphäre sehr angenehm. Insbesondere das Miteinander mit den übrigen Teams empfinde ich als sehr angenehm. Die Halle hier ist voll von Menschen, die mit großer Begeisterung an ihren Robotern arbeiten. Bis auf ein einziges Team hängt in jeder Garage ein grünes Schild, dass die Aufnahme von Fotos und Videos ausdrücklich erlaubt. Die Wissenschaftler und Techniker laufen von Garage zu Garage und informieren sich wissbegierig über die Konstruktion, Hard- und Software der anderen Teams. Die eigenen Erfahrungen werden meist gerne geteilt und wie es aussieht, knüpfen manchmal nicht nur Menschen, sondern auch Roboter neue Kontakte:
Atlas und Walkman verstehen sich.
Insgesamt gehen alle Teams sehr hilfsbereit miteinander um. Man leiht sich gegenseitig Ersatzteile und Werkzeug. Gegen Abend zeigt sich dann, welche Teams schon lange dabei sind und entsprechend eine ausgereifte Hard- und Software vorweisen können. Diese Teams verlassen ihre Garage am Abend und genießen ein wenig Freizeit. Andere Teams, die noch jung im Rennen sind und meist ihre Roboter vollständig selbst gebaut haben, bleiben bis in die Nacht hinein. Viele arbeiten im Schichtbetrieb – so wie wir.
Ich erinnere mich gut noch an die ersten DARPA Grand Challenges in 2004 und 2007. Damals habe ich noch den alten VHS Recorder an den Rechner angeschlossen, um den Internet-Stream aufzunehmen. Ich glaube Arne hat immernoch irgendwo meine Aufnahmen von der Urban Challenge? 😉
In der kommenden Woche finden die Finals der aktuellen DARPA Robotics Challenge (DRC) statt. Dabei geht es darum, dass ein ferngesteuerter Roboter in einem simulierten Katastrophenszenario eine Mission aus mehreren Teilaufgaben bewältigen muss. Zu den Aufgaben zählt das Fahren eines Autos, das öffnen und durchschreiten einer Tür, das Herstellen eines Durchbruchs in einer Gipskartonwand, das öffnen eines Industrieventils und einiges mehr.
Eine genauere und anschauliche Beschreibung findet ihr auf Sciencenews.org.
Insgesamt treten am 05. und 06. Juni 25 Teams in der Challenge an. Einen Überblick über die Teams und ihre Roboter gibt’s auf der offiziellen DRC Webseite.
Ich selbst darf als Mitglied des Teams Walkman vom IIT (Istituto Italiano di Tecnologia) dieses Mal alles aus nächster Nähe miterleben.
Unser Roboter ist dieses wunderschöne Stück Technik hier, dessen Entwicklung vor knapp einem Jahr im Rahmen des gleichnamigen EU-Projekts begann:
Walkman
Heute sitze ich am Flughafen und blicke auf einige sehr arbeitsreiche Wochen und Wochenenden seit meiner Ankunft am IIT zurück. In den kommenden Tagen packen wir den Roboter in Pomona aus und beginnen mit den letzten Vorbereitungen und Tests. Auch das werden wohl sehr intensive aber spannende Tage mit unserem Team sowie auch zusammen mit all den anderen Teams. Ich hoffe ein paar Eindrücke an dieser Stelle mit Botzeit teilen zu können.
In der vergangenen Woche fand das European Robotics Forum statt. Dabei handelt es sich um eine Networking-Veranstaltung, bei denen aktuelle und zukünftige Trends in der europäischen Forschungslandschaft diskutiert werden. Einem Blick ins Programm der Veranstaltung verrät bereits einen guten Überblick, was die deutsche Robotik Gemeinde umtreibt. Ein wesentlicher Aspekt ist es, die Verknüpfung zwischen Wahrnehmung und Handlung in Robotern zu verbessern. Es geht darum, einen Roboter in die Lage zu versetzen, komplexe Bewegungen und Manipulationsaufgaben, die einen hohen Grad an Geschick erfordern, selbstständig oder durch Demonstration zu erlernen und zu adaptieren.
In meinen Augen ist das ein hochspannendes Thema, in dessen Kontext ich vor etwas längerer Zeit bereits auf nachfolgende beeindruckende Videos aufmerksam geworden bin:
Das Video zeigt, wie ein Mensch einem Roboter das Tischtennis Spielen demonstriert. Anschließend erprobt und verbessert der Roboter selbstständig seine Fähigkeiten. Schließlich, spielt der Roboter Tischtennis mit einem Menschen.
Der Tischtennis Demonstrator ist meiner Ansicht nach sehr gut geeignet um Forschungsergebnisse dieser Art darzustellen. Es gibt viele Freiheitsgrade. Die Dynamik der Aufgabe ist hoch und fordernd. Eine Tischtennisplatte hat vertretbare Abmessungen, sodass sich der Demonstrator in einem Labor gut realisieren lässt. Das Spiel mit einem echten Menschen ist nicht planbar. Es kommt zu unvorhersehbaren Ballwechseln. Daher demonstriert das Experiment prinzipell sehr gut die Generalisierungsfähigkeit aber auch die Grenzen entwickelter Algorithmen.
Hohe Erwartungen
Im Februar kündigte der Roboterhersteller KUKA mit nachfolgendem Video ein Tischtennis Duell zwischen einem KUKA Roboter und dem Tischtennisprofi Timo Boll an.
Vor dem Hintergrund der zuvor dargestellten Forschungsarbeiten war ich natürlich freudig gespannt auf das Event. Und damit war ich nicht allein. Aus den Kommentaren:
„Hmm…ein Fake wird es nicht sein, glaube aber nicht das der Bot den Hauch einer Chance gegen Boll hat, sobald der mit Topspin angreift. […]“
„Fantastic. Cant wait to see this in action…“
„Well…never thought I’d be so hyped for a ping pong match!“
Auf IEEE Spectrum News schreibt Evan Ackermann: „Wow, Kuka wouldn’t have set this whole thing up unless it was actually going to be a good match! Maybe we’ll see some amazing feats of high speed robot arms, vision systems, and motion tracking!“
Ernüchterung
Die geschürte Erwartung bestand in einem tatsächlichen „Duell“ im Sinne eines echten Spiels zwischen Mensch und Roboter. In meinem durchaus robotisch geprägten Umfeld wurden rege Diskussionen geführt, wie das hypothetische Match ausgehen würde. Ebenso wurden Vermutungen über technische Realisierungen diskutiert. Die oben angesprochenen Forschungsergebnisse haben die prinzipielle Machbarkeit ja bereits vor einiger Zeit demonstriert. Bis hier her: schöne Arbeit seitens des Marketings. Das mit Spannung erwartete Duell war in aller Munde. Am 10.03. erschien dann das ernüchternde Video:
Für sich genommen ein nettes Werbe-Video. Aber nicht das angekündigte Spiel zwischen Mensch und Maschine. Nur ein mit Spezialeffekten voll gepumpter Trickfilm. Die Story: erst dominiert der Roboter, dann reißt Timo das Ergebnis noch einmal mit spektakulären Spielzügen rum. Die wohl beabsichtigte Botschaft des Roboterherstellers wird am Ende noch einmal explizit formuliert:
„Not the best in table tennis. But probably the best in robotics.“
Die in meinem Umfeld gespiegelte Botschaft fiel eher anders aus. Sie war mehr von Enttäuschung geprägt. Herauszuhören war zusammenfassend: „KUKA hat ein Duell versprochen, aber nur einen Trickfilm geliefert.“ Auch das spiegelt sich in den sozialen Netzwerken wieder:
„Agreed, great idea for marketing, but poorly developed“
„I was so excited to see a duel between a robot and a world champion in table tennis. Expectations were like Kasparov vs Deep Blue, right? Turns out it’s just a very well shot but fake commercial.“
Evan Ackermann trifft auf IEEE Spectrum News den Nagel auf den Kopf: „But the encounter wasn’t the „robot vs. human duel“ we were promised. What Kuka gave us instead is an overproduced, highly edited commercial that, in our view, will puzzle (rather than amaze) those of us who follow robotics technology closely.“
In meinen Augen eine verpasste Chance, Menschen zu begeistern und durch technologische Leistung zu überzeugen.
Zu allem Überfluss erschien diese Woche dann ein weiteres Fake-Video (dieses Mal nicht von KUKA) von einem Tischtennisroboter, der angeblich in einer heimischen Garage realisiert wurde:
In der Beschreibung zum Video steht: „Nach ca. 2 Jahren Entwicklungsarbeit habe ich mit meinem Freund Michael nun unseren selbst gebauten Tischtennis Roboter soweit fertig gestellt, dass man mit ihm schon ordentliche Ballwechsel spielen kann.“ Leider ist das Video offensichtlich montiert, wie einige aufmerksame Kommentatoren anmerken:
„It is fake, look at 1:09! You can see that the camera in the upper right of the garage door is in front of the table tennis racket because it was added to the footage later.“
„Had me fooled until the close up at 2:20. Those movements don’t seem real, and it seems weird that every movement has the same sound even tough the speeds are different and so are the moves.“
camera in the upper right of the garage door is in front of the table tennis racket
Als Trickfilm-Projekt ist das Video sicherlich überzeugend gut gemacht. Das belegen auch die zum Teil auch emotional aufgeladenen Diskussionen zur Echtheit des dargestellten Experiments…
Zwei Aspekte haben mich schließlich zur Wahl des Titels für diesen Blogeintrag bewegt:
Enttäuschung
Beide Videos, das von KUKA und das Garagen-Video, haben eine unglaublich rasante Verbreitung in den sozialen Netzwerken erfahren. Für den geneigten Robotik-Laien, so befürchte ich, mag allerdings durch beide Videos ein falscher Eindruck von dem entstehen, was Roboter heute leisten können. Die damit verbundenen komplexen Problemstellungen hat Arne in einem früheren Blogeintrag bereits ausführlich thematisiert.
Darüber hinaus erscheint Tischtennis als Demonstrator für die eingangs beschriebenen Forschungsprojekte erst einmal verbraucht. Bei jeder zukünftigen Demonstration des Experiments und jedem neuen Video dazu schwingt zunächst einmal unterschwellig mit: „Schau mal, da hat wieder einer so getan, als könnte er mit einem Roboter Tischtennis spielen“. Vielleicht fällt ja jemandem ein alternativer, hinsichtlich Komplexität, Anzahl der Freiheitsgrade und Realisierbarkeit im Labormaßstab vergleichbarer alternativer Demonstrator ein?
Aus robotischer Sicht finde ich die Ereignisse in Summe also sehr schade und komme zu dem Schluss: dies war ein trauriger Monat für die Robotik.
Im letzten Jahr habe ich bereits zum Kinostart den Film Plug & Pray empfohlen. Vergangenen Freitag nun ist der Film Plug & Prayauf DVD erschienen (Affiliate-Link). Ein hoch-interessanter Dokumentationsfilm zur aktuellen Robotik-Forschung mit Ausschnitten aus Forschungsinstituten aus aller Welt. Immer wieder unterbrochen durch die interessanten, kritischen Ansichten des wunderbaren und leider inzwischen verstorbenen Joseph Weizenbaum.
Klare Kaufempfehlung!
Nachtrag: Regisseur Jens Schanze macht mich darauf aufmerksam, dass es auf der Film-Website http://www.plugandpray-film.de nicht nur eine DVD-Sonderedition mit Bonusmaterial und verschiedenen Sprachen gibt, sondern dort auch ein größerer Teil der Erlöse direkt an die Filemmacher fließt. Jens Schanze schreibt über die Sonderedition:
Plug & Pray DVD Special Edition – enthält bisher unveröffentlichte Szenen mit Joseph Weizenbaum, iCub und Robovie sowie ein exklusives Interview mit dem Regisseur Jens Schanze. Originalversion mit Untertiteln in Deutsch, Englisch, Französisch, Spanisch, Portugiesisch, Russisch
Also besser hier kaufen. Und hier nochmal der Trailer:
In der letzten Zeit habe ich einige Male über den iCub geschrieben. Das liegt zum Einen daran, dass ich bekennender iCub-Fan bin und zum Anderen daran, dass ich in letzter Zeit immer häufiger von Arbeitswegen mit ihm in Berührung komme. Endlich finde ich nun die Zeit, mal über eine neue Entwicklung des iCub zu schreiben, die ich schon seit einigen Monaten mit Spannung verfolge und zu der ich jetzt auch Bilder und Videos aus erster Hand zeigen kann: Die neuen Beine des iCub.
Der iCub ist im Rahmen des RobotCub-Projekts seit 2004 entstanden und wird seitdem kontinuierlich weiterentwickelt. Hauptsächlich bezog sich dies in den letzten Jahren auf Weiterentwicklung der Firmware und der iCub-Softwareumgebung, um die vorhandene Hardware immer besser, effektiver und einfacher nutzen zu können. Da der iCub als humanoide Forschungsplattform aber so erfolgreich ist, wird er konsequenterweise auch in Sachen Hardware weiterentwickelt. Kopf, Hände, Arme, Beine … für nahezu alle Teile existieren mehr oder weniger fortgeschrittene Pläne und Ansätze zur Weiterentwicklung.
Am CoR-Lab arbeiten wir zur Zeit noch mit der ersten Version des iCub, auf der Summer School jedoch durfte ich schon mit einer weiterentwickelten Version des iCub arbeiten, die über Kraftsensorik in Armen und Beinen verfügt. Diese Kraftsensoren können (noch relativ grob) Kontaktkräfte messen, die auf Arme und Beine einwirken. So erlaubt diese iCub-Version zum Beispiel, dass man den iCub bei der Hand nimmt und seinen Arm führt; ein bedeutender Fortschritt in der Interaktion von Mensch und Roboter, wenn man ihn anfassen und führen kann. Eine weitere faszinierende Möglichkeit ist, den Roboter in einen Nachgiebigkeits-Modus zu schalten. In diesem Modus reagiert der Roboter auf die Kräfte, die auf ihn wirken, auf die gleiche Art, wie es eine Feder tun würde: Bei kleiner Krafteinwirkung gibt der Roboter ein wenig nach, bei größerer Krafteinwirkung gibt der Roboter deutlicher nach. Der Roboter fühlt sich dadurch sanft und weich an. Dieser Modus, diese Art der Regelung, nennt sich Active Compliance (aktive Nachgiebigkeit). Ein Video mit dieser iCub-Version zeigt, wie Ugo diese Eigenschaften nutzt, um den iCub mit Spielzeug vertraut zu machen:
Der iCub wird geführt und kann Objekte ertasten
Bei meinem Besuch am IIT (Italien Institute of Technology in Genua) an einem Tag während der Summer School habe ich eine iCub-Version kennengelernt, die für das AMARSi-Projekt entwickelt wird und dieses Konzept noch weiter treibt. Dieser iCub (der vielleicht irgendwann einmal auf den Namen cCub, Compliant iCub, hören wird), hat nicht nur wie sein Vorgänger in Armen und Beinen jeweils einen Kraftsensor, sondern er verfügt über neue Gelenke, die jeweils sowohl weitere Kraftsensorik als auch echte mechanische Federn integrieren. Was diese integrierten Gelenk-Module in dem Betrachter auszulösen vermögen, wenn sich der iCub damit bewegt, ist eine der faszinierendsten Dinge, die ich in letzter Zeit in der Robotik gesehen habe. Die Kombination aus Active Compliance, also der durch Sensorik und Regelung simulierten Nachgiebigkeit, mit der realen Nachgiebigkeit der eingebauten mechanischen Fähigkeiten (Passive Compliance), bewirkt eine Natürlichkeit der Bewegung des Roboters, die im ersten Moment irritierend bis verstörend wirken kann.
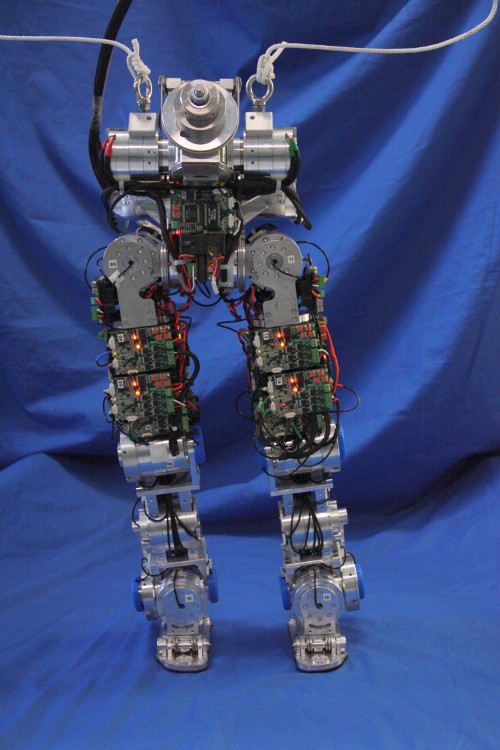
Active Compliance allein macht die Interaktion mit dem Roboter schon deutlich natürlicher, und Bewegungen sehen weicher, runder und natürlicher aus. Nichtsdestotrotz bleibt der Eindruck beim Betrachter, dass es sich – tatsächlich – nach wie vor um eine Maschine handelt. Und genau dieser Eindruck scheint in dem Moment zu verschwinden, in dem zu der aktiven Nachgiebigkeit die echte (passive) Nachgiebigkeit der mechanischen Federung hinzukommt. Der Roboter bewegt sich damit offenbar in einer Art und Weise mit unterbewusst wahrgenommenen Schwingungen, die im menschlichen Hirn den Eindruck erwecken, hier würde sich ein biologisches Körperteil bewegen. Die mechanische Federung scheint ein ähnliches Muster aus Schwingungen und Oberschwingungen zu erzeugen, wie es menschliche Muskeln und Sehnen tun. Für mich war dies ein faszinierender, erschreckender Moment – als Robotiker allerdings positiv, was vermutlich nicht jedem Betrachter so ergeht. Nikos Tsagarakis, dessen Gruppe am IIT diese integrierten nachgiebigen Gelenke des iCub entwickelt, hat mir Fotos und Videos zugesandt und mir erlaubt, diese hier im Blog zu veröffentlichen. Zu sehen sind im folgenden Video die neuen Beine (noch ohne Oberkörper), wie sie balancieren und kleine Schritte tun. Ich weiß nicht, wie gut der beschriebene Effekt im Video erkennbar ist, wenn man ihn nicht live erlebt, aber dies ist der Versuch:
Die neuen Beine des iCub in Bewegung
Wer dies im Video nicht zu erkennen vermag, erfreut sich vielleicht an der Vorstellung des vergangenen AMARSi-Projekttreffens, als bei der Live-Demo dieser Beine grob geschätzt 40 Wissenschaftler, die in ihrem Leben schon hunderte Roboter gesehen haben, schweigend und mit großen Augen minutenlang diesen Beinen bei ihrer einfachen Bewegung zusahen.
Und hier die Beine nochmal in der Großaufnahme:
Die neuen Beine des iCub (Foto: IIT)
Technisch Interessierte finden eine detailliertere Beschreibung dieser integrierten Aktuatoren in der Konferenzbeitrag zur ICRA 2009: A Compact Soft Actuator Unit for Small Scale Human Friendly Robots (kostenpflichtiger Zugriff via IEEE). Die weitere Entwicklung dieser iCub-Version wird weiterhin auf der Website des AMARSi-Projekts dokumentiert.
Im nächsten Monat, am 11. November, wird der Film Plug & Pray in die deutschen Kinos kommen. Ich hatte schon vor einigen Wochen das Vergnügen, den Film in trauter Runde während der iCub Summer School zu sehen, von der auch Szenen im Film zu sehen sind (unter anderem mit dem Slogan des Filmes „Dafür werden wir alle exkommuniziert“).
Der iCub im Film „Plug & Pray“
Die Visionen, die heutzutage wegen fortschreitender Technik rund um die künstliche Intelligenz und die Robotik entstehen, sind längst auf dem Level der Science-Fiction des letzten Jahrhunderts angekommen. Auch wenn es technisch an so vielen Stellen noch hapert, sind diese Visionen auch in der Forschung präsent. So wird im Film zum Beispiel Hiroshi Ishiguro gezeigt, der sich einen Roboter nach seinem Abbild geschaffen hat, den Geminoid. Oder der iCub, der einem Kind nachgebildet ist und wie ein Kind lernen und seine Umgebung entdecken soll. Oder Ray Kurzweil, seit Jahren in den USA gefeierter Visionär, der seit einiger Zeit die baldige Verschmelzung von Mensch und Maschine und das menschgemachte Vorantreiben der Evolution predigt.
Plug & Pray ist ein Dokumentarfilm und stellt aktuelle Visionen, Überzeugungen und den Alltag von Forschungsinstituten und Wissenschaftlern weltweit vor, die sich mit künstlicher Intelligenz und Robotik beschäftigen. Durch die schonungslose und gut recherchierte Darstellung der Szene und den zum Teil von den Wissenschaftlern leichtfertig vorgetragenen Fantasien ist der Film durchaus provokant und vielleicht sogar verängstigend. Er nimmt dabei allerdings seine dargestellten Protagonisten ernst, bleibt menschlich und liebevoll, ist niemals reißerisch und lässt Platz zum Nachdenken.
Anstrengend wird der Film dadurch nicht, dass er nie wirklich technisch wird und vor allem durch den wunderbaren, mittlerweile leider verstorbenen Joseph Weizenbaum, einem der Computerwissenschaftler des letzten Jahrhunderts, der mit Humor und scharfem Verstand den roten Faden des Filmes bildet. Immer wieder sind Interviewschnipsel und Alltagsszenen mit ihm eingestreut, die die zum Teil verstörenden Szenen einordnen und in der normalen Welt erden. Dass dies ausgerechnet einem Computerwissenschaftler gelingt, der mit ELIZA (Wikipedia) einen der Meilensteine der künstlichen Intelligenz geschaffen hat, ist erstaunlich und beruhigend zugleich.
Gut recherchiert, nachdenklich, humorvoll und mit durchdachter Einordnung der gesellschaftlichen Relevanz ist Plug & Pray ein Film für Menschen vom Fach, Technik-Interessierte und jeden, den ein Zweig unserer Zukunft interessiert, der gerade rasant entsteht und der immer noch ziemlich unberechenbar ist.
Trailer zum Film „Plug & Pray“
Anschauen dringend empfohlen.
PLUG & PRAY ist erschütternd und packend. Joseph Weizenbaum, mit der Gabe des Humors ausgestattet, verkörpert den gesunden Menschenverstand, während um ihn herum der Wahnsinn geadelt wird.“











{kind=link}