So, es ist soweit, nach drei Jahren verlasse ich im mein bisheriges Büro im Hauptgebäude der Universität Bielefeld und ziehe etwa einen knappen Kilometer weiter auf den neuen Campus der Uni Bielefeld.
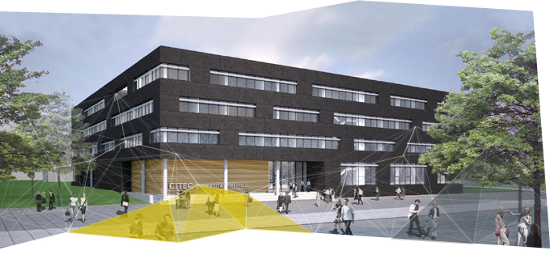
Auf der sogenannten schlausten Baustelle Europas entsteht neben neuen Uni- und FH-Gebäuden auch der Forschungsbau „Interaktive Intelligente Systeme“, auf den man in Bielefeld mächtig stolz ist. In seiner Empfehlung zur Förderung von Forschungsbauten an Hochschulen hatte der Wissenschaftsrat nämlich den Antrag zur Errichtung eines neuen Forschungsbaus „Interaktive Intelligente Systeme“ landesweit mit Platz 1 bewertet.
Da ich es in den letzten Wochen wegen akuter Überarbeitung nicht zu enormer Aktivität geschafft habe und sich das vermutlich in den nächsten Tagen erst einmal nicht ändern wird, hier schon einmal ein paar Links der letzten Wochen. Über Roboter, die sich entschuldigen, selbständige Mondfähren und die Zusammenarbeit von Mensch und Roboter. Und nun geht’s ab nach Oslo …
Soziale Roboter„Ich weiß, es ist schwierig mit mir zu arbeiten“, sagt der Roboter. Welche Fähigkeiten und Verhalten benötigen Roboter, damit Menschen sie als angenehme Gesellschaft empfinden und sich in Anwesenheit von Robotern wohlfühlen? Das „Exzellenzcluster Cognitive Interaction Technology“ (Citec) in Bielefeld geht dieser Frage nach.Ich weiß, es ist schwierig mit mir zu arbeiten(Süddeutsche, Katrin Blawat, 18. August 2010)LaufmaschineArtikel über die Laufmaschine BioBiPed, die im Rahmen eines Forschungsprojekts des Lauflabors Jena und der TU Darmstadt wntwickelt wird. Das Außergewöhnliche: Der Roboter soll zuerst rennen und dann erst gehen lernen.Eine Laufmaschine lernt gehen(Heise Online, Hans-Arthur Marsiske, 20. August 2010)Weltraum-RobotikBis 2018 will Weltraumorganisation ESA ein unbemanntes Raumschiff zum Mond fliegen lassen. „Die Mondfähre muss Hindernisse, steile Hänge und Krater beim Anflug erkennen, ihnen ausweichen und selbstständig einen geeigneten Landeplatz suchen können“, ein typischer Anwendungsfall der explorativen Robotik.Europäische Roboter sollen 2018 auf Mond landen(Spiegel Online, Cinthia Briseño, 16. September 2010)Servicerobotik„Milliardenmarkt Maschinenmensch“ – Das Handelsblatt beobachtet, dass Roboter aus den Werkshalle, also dem industriellen Umfeld, mehr und mehr in den Alltag wandern. Ob in der Medizintechnik, zur Pflege oder als Staubsauger- und Spielroboter.Roboter laufen aus den Werkshallen(Handelsblatt, Martin Murphy und Hans Schürmann, 29. September 2010)Roboter-Ethik„Roboter sollen nicht töten dürfen“ – Tina Klopp schreibt über die Fiktion eines bloodless war, eines Krieges ohne Verluste, und von der Forderungen des Ethikers Rob Sparrow nach einem Menschenrecht, nicht von Robotern getötet zu werden.Roboter sollen nicht töten dürfen(ZEIT Online, Tina Klopp, 27. September 2010)Roboter als MitarbeiterDer Industrieroboterbauer Reis Robotics will zusammen mit fünf Partnern aus Industrie und Forschung in den nächsten drei Jahren daran arbeiten, Roboter ohne räumliche Trennung mit Menschen zusammenarbeiten zu lassen. Eine Aufgabe, die wegen der Kraft und des Gewichts von Robotern dringend Sicherheitsfragen aufwirft.Roboter sollen Hand in Hand mit Menschen arbeiten(Main-Netz, Nina-Anna Beckmann, 29. September 2010)
Über Hinweise zu lesenswerten Artikeln freue ich mich jederzeit. Entweder per Kommentar oder per E-Mail anbotzeit@ohmpage.org
Der Nao, französischer Fußballroboter und aktuelle Standardplattform in der RoboCup-Fußballliga, soll in Zukunft im Weltall trainieren. Allerdings nicht sich selbst, sondern die dortigen Langzeitastronauten.
Nao
Der Nao soll als Personal Trainer die Langzeitastronauten bei Laune halten und zum täglichen Kampf gegen den Muskelrückgang motivieren. Das zumindest plant das CoR-Lab, Forschungsinstitutes für Kognition und Robotik, in Zusammenarbeit mit dem DLR, dem deutschen Zentrum für Luft- und Raumfahrt.
Das Projekt umfasst sowohl die Analyse von Techniken menschlicher Motivationstrainer als auch die Übertragung der Ergebnisse auf den Roboter. Die Universität Bielefeld hat mit dem CoR-Lab und dem CITEC, dem Exzellenzcluster für kognitive Interaktionstechnologie, die notwendige Expertise, sowohl die Interaktion zwischen Motivationstrainer und -schüler zu verstehen, als auch dies in Technik umzusetzen. Zumindest in dem Rahmen, in dem man dies heutzutage schon mit Roboter machen kann. Zum Einsatz kommen werden dabei wahrscheinlich sowohl der Nao als auch FloBi, ein emotionaler Roboterkopf aus Bielefeld.
Flobi, Roboterkopf mit ausdrucksstarker Mimik
Das Projekt läuft über drei jahre und endet in einem Live-Versuch, in dem mehrere Personen unter medizinischer Aufsicht isoliert werden und über mehrere Wochen unter den Augen der Wissenschaftler vom Nao bespaßt werden und dabei auf ihre Stimmungslage und Trainingserfolge untersucht werden.
Disclaimer: Das CoR-Lab ist mein aktueller Arbeitgeber.