Der Oncilla ist verpackt und fertig für die Rückreise. Eingepackt in einem wasser- und stoßfesten Koffer, gemütlich in maßgeschneiderter Schamstoffeinfassung.
Auf geht’s ins neue Zuhause!
Robotik-Blog
Der Oncilla ist verpackt und fertig für die Rückreise. Eingepackt in einem wasser- und stoßfesten Koffer, gemütlich in maßgeschneiderter Schamstoffeinfassung.
Auf geht’s ins neue Zuhause!
Gestern habe ich mich mit einem leeren speziellen Transportkoffer auf den Weg nach Lausanne in die Schweiz gemacht, um einen neuen Roboter abzuholen und nach Bielefeld zu bringen. Noch ist der Koffer leer, aber für den Rückweg wird mir das BioRob Lab
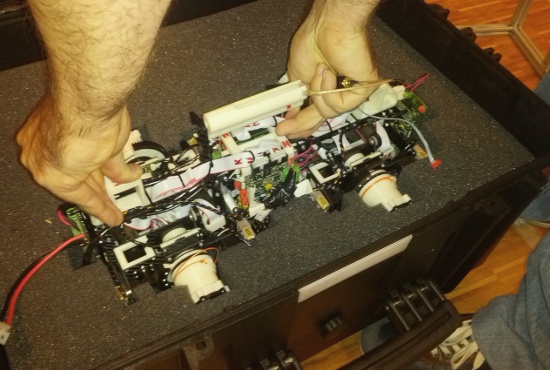
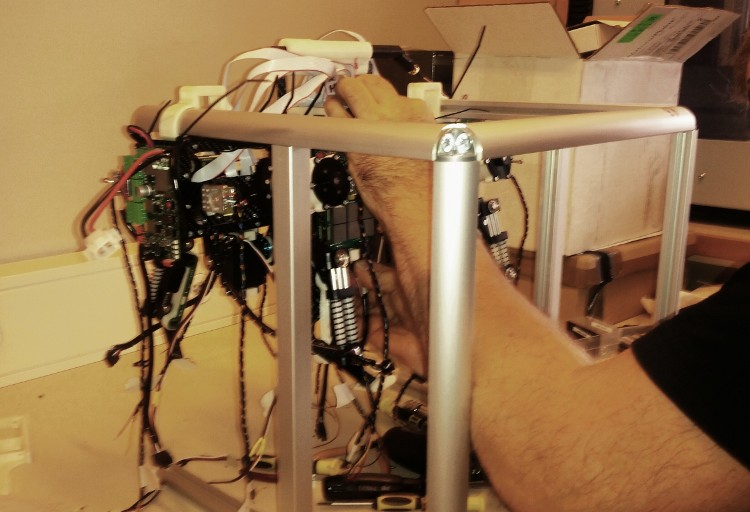
Hier der aktuelle Zustand des Oncilla-Roboters von heut morgen, noch auf dem Ständer und (noch) mit losen Kabelsträngen. Bis morgen ist Peter (im Bild) noch mit der finalen Verkabelung beschäftigt:
Hier ist ein Video der ersten Gehversuche (bzw. Trab-Versuche) eines Oncilla-Zwillings, das das Reservoir Lab aus Gent Anfang des Jahres gemacht hat:
Ich hole den Roboter persönlich ab, um gleichzeitig auch eine Einführung in die Hardware zu bekommen. Da ich selbst hauptsächlich mit Software arbeite, bin ich in Hardware-Fragen weitgehend unerfahren und benötige dringend einen Crash-Kurs in Inbetriebnahme und Wartung von Vierbeinern, damit ich unseren Oncilla nicht direkt bei den ersten Experimenten zerlege.
Gleichzeitig werden wir auch die Zeit nutzen, ein bisschen an der Control-Software zu hacken, was direkt vor Ort mit den Oncilla-Erschaffern einfacher ist als über größere Distanz. Ziel ist eine einfache API zu entwickeln, da Software und Hardware des Roboters (inklusive Simulator) in naher Zukunft vollständig Open Source sein sollen.
Am Donnerstag geht’s dann samt Roboter im Gepäck zurück zum CoR-Lab
Und dann wartet die eigentliche Arbeit: dem Oncilla neue Tricks beizubringen!