Als mobile Roboter werden Roboter bezeichnet, die sich in ihrer Umgebung bewegen und agieren können. Der Bau von mobilen Robotern ist beliebt in der Hobbyelektronik, mobile Roboter werden aber auch zunehmend interessant für industrielle Anwendungen, z.B. in der Fertigung und Intralogistik.
Moderne Automobile bringen immer mehr Technologie mit, die den Fahrer beim Fahren entlasten sollen. Vielfach noch optional und in teureren Autos, gibt es mittlerweile Hilfe von Fahrerassistenzsystemen beim Spurwechsel, Spurhalten, Einparken, Bremsen und mehr. Dass dieser Weg nicht unbedingt die volle Autonomie des Fahrzeugs zum Ziel haben muss, zeigt das folgende Video des Berliner Autonomous Labs, in dem sich das Auto zwar selbstständig über die Fahrbahn bewegen kann, die Entscheidung zur Fahrtrichtung kommt aber weierhin vom Fahrer … per Gedankensteuerung:
https://youtube.com/watch?v=iDV_62QoHjYPKW mit Gedankensteuerung
Der BrainDriver aus der Arbeitsgruppe von Raúl Rojas an der FU Berlin.
Einen Vorgeschmack zur weiteren Entwicklung in der Robotik hat das Deutsche Zentrum für Luft- und Raumfahrt (DLR) in den letzten Tagen geliefert: Angetriggert von einem Artikel in der IEEE Spektrum, wie ich annehme, berichteten in den letzten Tagen allerhand englischsprachige Robotik-Blogs (z.B.) über die neue Roboterhand, die das DLR vorgestellt hat.
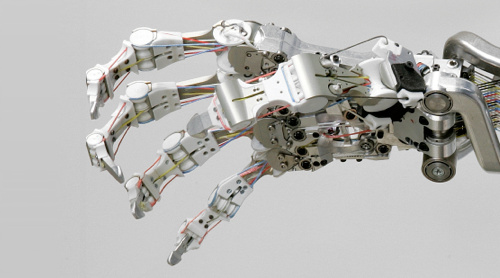
Leichtbau-Hand des DLR
Die Hand sieht nicht nur spektakulär aus, ihre wahre Sensation liegt zum einen in ihrer Ähnlichkeit zur menschlichen Hand und vor allem in ihrer Robustheit. Die Ähnlichkeit zur menschlichen Hand liegt maßgeblich im (technische) Design begründet, das dem Bewegungsapparat der menschlichen Hand sehr Nahe kommt. Dass die Hand in den Blogs dieser Welt unter Bezeichnungen wie Super Robust Robot Hand geführt wird, ist darin begründet, dass das DLR zeigen kann, dass diese Hand selbst mehrere Schläge mit einem Hammer überlebt; mit nahezu allen bisherigen Robotik-Bauteilen absolut undenkbar. Vor allem, wenn sie dafür nicht in eine Schutzhülle eingepackt sein müssen und sich dabei noch so präzise bewegen können.
Hier im Video ist die Hand zu sehen und wie mit ihr umgegangen wird:
Leichtbau-Hand des DLR in Bewegung und grob behandelt
Schon auf der Automatica im letzten Jahr zeigte das DLR die Hand plus angeschlossenem Unterarm und zog damals schon viele Blicke auf sich. Dass die Robotik-Abteilung des DLR um Hirzinger plant, sozusagen als nächsten großen Wurf, dieses Designprinzip innerhalb der nächsten fünf Jahr in einen Vollkörper-Humanoiden fließen zu lassen, stimmt mich äußerst erwartungsvoll. Der Plan ist, so hört man aus eingeweihten Kreisen, innerhalb der nächsten fünf Jahre die Hardware des Roboter fertigzuhaben und in weiteren fünf Jahren den Roboter vollständig zu beherrschen, so dass er rennen und Treppen rauf- und runterspringen kann. Und wem ist das mehr zuzutrauen, als dem DLR, nachdem die Robotik-Abteilung zuletzt mit dem Leichtbau-Industriearm gezeigt hat, zu welchen technologischen Sätzen man dort in den Lage ist.
Was diese Hand so besonders robust macht, ist ihr durchdachtes Design, moderne Materialien, aber vor allem die Verwendung von künstlichen Sehnen zur Bewegung der Finger. Diese erlauben es, plötzlich auftretenden Kräften nachzugeben (wie zum Beispiel bei einem Aufprall), so dass die Struktur der Hand und die Elektronik von diesen Kräften nicht verletzt wird. Weiterhin wurden die Sehnen in einer Art und Weise verbaut, die es erlauben, ihre Steifigkeit zu verändern. Also etwa steife Sehnen für einen möglichst präzisen Griff und weniger steife Sehnen, wenn es darum geht, unbekannte Gegenstände zu ertasten, oder empfindliche Objekte sanft zu greifen.
Mit insgesamt 19 Freiheitsgraden ist die Hand außerdem ähnlich bewegungsfähig wie unsere Hand (die gerade einmal einen Freiheitsgrad mehr hat). Bei der Konstruktion haben die Bauer darauf achtgegeben, dass die Bewegungsabläufe der Finger denen menschlicher Finger sehr nahe kommen, was diese Hand insgesamt mit all den obigen Faktoren zur aktuell wahrscheinlich coolsten Roboterhand für Humanoide macht. Der Konferenzbeitrag 1 zu der Hand und diesem Arm wurde auf der HUMANOIDS-Konferenz im Dezember in Nashville folgerichtig mit dem Best Paper Award ausgezeichnet. Dort zeigte der Vortragende Grebenstein im Video, wie mit einem Baseball-Schläger auf den Arm eingeschlagen wird, ohne dass dieser Schaden nimmt. Und das – das macht es so beeindruckend – nicht etwa mit ausgeschalteten Motoren und schlaff herumhängend, sondern in voller Positionsregelung. Ein gehöriger Unterschied, muss man doch bislang mit Robotern jede Bewegung im Vorhinein in Simulation ausführen, um jede Kollision mit eigenen Körperteilen oder anderen Objekten und eine damit einhergehende Beschädigung des Roboters auszuschließen.
Auf den Humanoiden des DLR in diesem Design kann man nur gespannt sein. Mehr und mehr beeindruckende Humanoide hat man in den letzten zwei Jahren die Weltbühne betreten sehen. Aber ein Leichtbau-Roboter, der in jedem Detail so durchdacht und so technologisch fortgeschritten ist, wie es uns mit der DLR-Hand gezeigt wurde, dürfte ein neues Niveau erreichen.
Zugegeben, für einen „Frohes neues Jahr“ und „Das war die Robotik 2010“-Blogeintrag ist es schon etwas zu spät. Aber ich dachte, ich sehe trotzdem mal durch die hiesigen Blogeinträge des vergangenen Jahres und überlege, was in der Robotik im vergangenen Jahr besonders erwähnenswert war.
Im Januar begann das Jahr mit einem großen Wurf der californischen Robotikschmiede Willow Garage, die die Version 1.0 ihres Open-Source-Betriebssystems für Roboter ROSveröffentlichte. ROS ist mittlerweile in der Robotik-Szene voll angekommen und viele Institute machen sich mittlerweile die Tatsache zunutze, dass sie mit ROS ein offenes System mit einer Vielzahl gut gewarteter State-of-the-Art -Standardkomponenten erhalten und sich mehr auf die Integration, sondern vielmehr auf konkrete Forschungsfragen konzentrieren können. Im gleichen Monat beschloss das Jet Propulsion Laboratory der NASA, dass der Mars-Rover Spirit erst einmal nicht weiterkommt und deshalb winterfest gemacht werden soll.
Im Februar hat mich vor allem eine realistische Hand-Prothese namens BeBionic beeindruckt, die in Videos fast menschlich aussieht. Im März habe ich meine Stelle am CoR-Lab angetreten und im April zeigte Willow Garage mit dem Wäsche-faltenen Roboter ein ersten von mehreren Videos, in denen Roboter PR2 in mal mehr und mal weniger sinnvollen Anwendungen zu sehen ist. Im Mai traute die Roboter-Lady iFairy ein japanisches Paar und im Juni haben sich auf der spannenden Automatica-Messe neben der Industrie auch die Robotik-Institute dieses Landes vorgestellt.
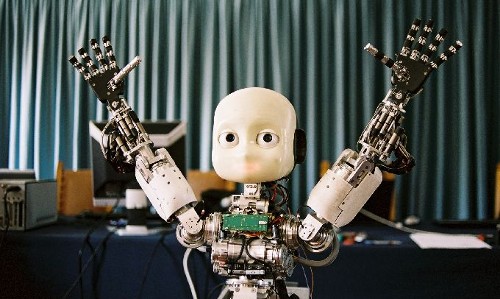
Im Juli hatte ich das Vergnügen, auf der Summerschool über mehrere Tage den iCub live und aktiv kennenzulernen, dessen neue Beine ich später auch noch vorgestellt habe.
Der August zeigte uns den unheimlichen Telenoid R1 und im November und Dezember hat zum Jahresende die Ingenieurskunst noch einmal gezeigt, was sich mit cleveren Ideen bauen lässt: sowohl der Universal Jamming Gripper mit Kaffeepulver als auch der zu Recht mit dem Zukunftspreis ausgezeichnete Rüssel von Festo bestachen durch ihr einfaches aber brillantes Konzept. (Hört sich irgendwie nach einem Satz aus einem Prospekt an, ist aber ernst gemeint) Und über das, was Microsoft Kinect seit Dezember mit der Robotiklandschaft anstellt, werde ich hofffentlich auch bald schreiben. Der Blogeintrag fliegt hier schon halb geschrieben herum, bis ich damit fertig bin, müssen aber ein paar Videos ausreichen, die ich hier immer mal wieder einstelle.
Insgesamt haben wir in 2010 eine Robotik-Landschaft gesehen, die immernoch viel experimentiert und zum Teil verrückten, neuen Ideen nachgeht. Gleichzeitig lässt sich aber auch beobachten, dass die Robotik auch abseits der typischen Industrierobotik beginnt, ernsthafte Lösungen für Probleme zu präsentieren, die bisher nicht lösbar waren und zum Teil nicht einmal ernsthaft lösbar schienen. Einige Themen und Blogbeiträge sind 2010 bei mir leider aus Zeitmangel unbeschrieben liegengeblieben. Aber es kommen immer weiter neue Themen und 2011 geht es sicher ebenso spannend weiter wie 2010 aufgehört hat.
Morgen geht`s für mich auf nach Nashville, Tennessee, wo am Montag eine der – aus meiner Sicht – spannendsten Robotik-Konferenzen stattfinden wird: die HUMANOIDS 2010, eine Konferenz gewidmet der Königsklasse der Roboter: den Humanoiden.
Ich bin am Dienstag auf dem im Rahmen der Konferenz stattfindenden iCub-Humanoids-WorkshopiCub and Friends dazu eingeladen, über meine Arbeit der letzten Monate vorzutragen. Workshops wie dieser sind eine tolle Gelegenheit nicht nur vorzutragen, sondern sehr fokussiert – in diesem Fall mit Fokus auf dem iCub – mit den anderen Teilnehmern intensiv Ideen auszutauschen und zu diskutieren.
Ich bin schon sehr gespannt auf die Vorträge der anderen Workshop-Teilnehmer und die Vorträge der Hauptkonferenz an den anderen beiden Tagen. Hoffentlich macht mir der Schnee beim Hinflug keinen Strich durch die Rechnung. Drückt mir die Daumen.
Ich bin leider etwas zu spät für einen Lesetipp, möchte aber trotzdem noch auf einen Artikel in der vorletzten Ausgabe der c’t (Ausgabe 24/2010 vom 8. November) hinweisen. Dort schreibt Hans-Arthur Marsiske einen Artikel zu laufenden Robotern, in dem ich auch zweimal zur Sprache komme. Marsiske schreibt regelmäßig tolle, gut recherchierte Robotik-Artikel, vornehmlich für den Heise-Verlag, von denen ich auch schon einigehier im Blogverlinkthabe. Hans-Arthur Marsiske war über meinen Artikel zur iCub Summer School auf mich aufmerksam geworden und hat im Rahmen seiner Recherche unter Anderem mit mir telefoniert und unser Institut besucht.
Der Artikel unter dem Titel Lauftraining für Roboter diskutiert den aktuellen Stand der Forschung zum zweibeinigen Laufen bei Robotern, vor Allem am Beispiel des iCubs und des BioBiped aus Darmstadt. Für Interessierte ist der Artikel auch jetzt noch für 1,50 EUR – wenn auch mit umständlichen Bezahlverfahren – zu haben.
In der letzten Zeit habe ich einige Male über den iCub geschrieben. Das liegt zum Einen daran, dass ich bekennender iCub-Fan bin und zum Anderen daran, dass ich in letzter Zeit immer häufiger von Arbeitswegen mit ihm in Berührung komme. Endlich finde ich nun die Zeit, mal über eine neue Entwicklung des iCub zu schreiben, die ich schon seit einigen Monaten mit Spannung verfolge und zu der ich jetzt auch Bilder und Videos aus erster Hand zeigen kann: Die neuen Beine des iCub.
Der iCub ist im Rahmen des RobotCub-Projekts seit 2004 entstanden und wird seitdem kontinuierlich weiterentwickelt. Hauptsächlich bezog sich dies in den letzten Jahren auf Weiterentwicklung der Firmware und der iCub-Softwareumgebung, um die vorhandene Hardware immer besser, effektiver und einfacher nutzen zu können. Da der iCub als humanoide Forschungsplattform aber so erfolgreich ist, wird er konsequenterweise auch in Sachen Hardware weiterentwickelt. Kopf, Hände, Arme, Beine … für nahezu alle Teile existieren mehr oder weniger fortgeschrittene Pläne und Ansätze zur Weiterentwicklung.
Am CoR-Lab arbeiten wir zur Zeit noch mit der ersten Version des iCub, auf der Summer School jedoch durfte ich schon mit einer weiterentwickelten Version des iCub arbeiten, die über Kraftsensorik in Armen und Beinen verfügt. Diese Kraftsensoren können (noch relativ grob) Kontaktkräfte messen, die auf Arme und Beine einwirken. So erlaubt diese iCub-Version zum Beispiel, dass man den iCub bei der Hand nimmt und seinen Arm führt; ein bedeutender Fortschritt in der Interaktion von Mensch und Roboter, wenn man ihn anfassen und führen kann. Eine weitere faszinierende Möglichkeit ist, den Roboter in einen Nachgiebigkeits-Modus zu schalten. In diesem Modus reagiert der Roboter auf die Kräfte, die auf ihn wirken, auf die gleiche Art, wie es eine Feder tun würde: Bei kleiner Krafteinwirkung gibt der Roboter ein wenig nach, bei größerer Krafteinwirkung gibt der Roboter deutlicher nach. Der Roboter fühlt sich dadurch sanft und weich an. Dieser Modus, diese Art der Regelung, nennt sich Active Compliance (aktive Nachgiebigkeit). Ein Video mit dieser iCub-Version zeigt, wie Ugo diese Eigenschaften nutzt, um den iCub mit Spielzeug vertraut zu machen:
Der iCub wird geführt und kann Objekte ertasten
Bei meinem Besuch am IIT (Italien Institute of Technology in Genua) an einem Tag während der Summer School habe ich eine iCub-Version kennengelernt, die für das AMARSi-Projekt entwickelt wird und dieses Konzept noch weiter treibt. Dieser iCub (der vielleicht irgendwann einmal auf den Namen cCub, Compliant iCub, hören wird), hat nicht nur wie sein Vorgänger in Armen und Beinen jeweils einen Kraftsensor, sondern er verfügt über neue Gelenke, die jeweils sowohl weitere Kraftsensorik als auch echte mechanische Federn integrieren. Was diese integrierten Gelenk-Module in dem Betrachter auszulösen vermögen, wenn sich der iCub damit bewegt, ist eine der faszinierendsten Dinge, die ich in letzter Zeit in der Robotik gesehen habe. Die Kombination aus Active Compliance, also der durch Sensorik und Regelung simulierten Nachgiebigkeit, mit der realen Nachgiebigkeit der eingebauten mechanischen Fähigkeiten (Passive Compliance), bewirkt eine Natürlichkeit der Bewegung des Roboters, die im ersten Moment irritierend bis verstörend wirken kann.
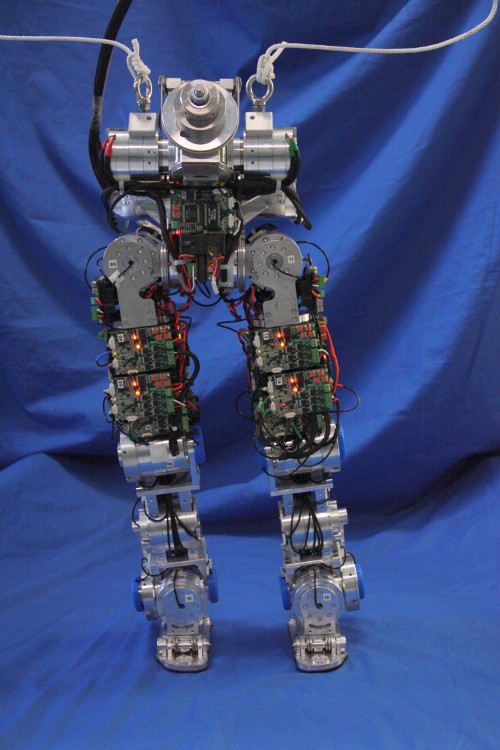
Active Compliance allein macht die Interaktion mit dem Roboter schon deutlich natürlicher, und Bewegungen sehen weicher, runder und natürlicher aus. Nichtsdestotrotz bleibt der Eindruck beim Betrachter, dass es sich – tatsächlich – nach wie vor um eine Maschine handelt. Und genau dieser Eindruck scheint in dem Moment zu verschwinden, in dem zu der aktiven Nachgiebigkeit die echte (passive) Nachgiebigkeit der mechanischen Federung hinzukommt. Der Roboter bewegt sich damit offenbar in einer Art und Weise mit unterbewusst wahrgenommenen Schwingungen, die im menschlichen Hirn den Eindruck erwecken, hier würde sich ein biologisches Körperteil bewegen. Die mechanische Federung scheint ein ähnliches Muster aus Schwingungen und Oberschwingungen zu erzeugen, wie es menschliche Muskeln und Sehnen tun. Für mich war dies ein faszinierender, erschreckender Moment – als Robotiker allerdings positiv, was vermutlich nicht jedem Betrachter so ergeht. Nikos Tsagarakis, dessen Gruppe am IIT diese integrierten nachgiebigen Gelenke des iCub entwickelt, hat mir Fotos und Videos zugesandt und mir erlaubt, diese hier im Blog zu veröffentlichen. Zu sehen sind im folgenden Video die neuen Beine (noch ohne Oberkörper), wie sie balancieren und kleine Schritte tun. Ich weiß nicht, wie gut der beschriebene Effekt im Video erkennbar ist, wenn man ihn nicht live erlebt, aber dies ist der Versuch:
Die neuen Beine des iCub in Bewegung
Wer dies im Video nicht zu erkennen vermag, erfreut sich vielleicht an der Vorstellung des vergangenen AMARSi-Projekttreffens, als bei der Live-Demo dieser Beine grob geschätzt 40 Wissenschaftler, die in ihrem Leben schon hunderte Roboter gesehen haben, schweigend und mit großen Augen minutenlang diesen Beinen bei ihrer einfachen Bewegung zusahen.
Und hier die Beine nochmal in der Großaufnahme:
Die neuen Beine des iCub (Foto: IIT)
Technisch Interessierte finden eine detailliertere Beschreibung dieser integrierten Aktuatoren in der Konferenzbeitrag zur ICRA 2009: A Compact Soft Actuator Unit for Small Scale Human Friendly Robots (kostenpflichtiger Zugriff via IEEE). Die weitere Entwicklung dieser iCub-Version wird weiterhin auf der Website des AMARSi-Projekts dokumentiert.
Traditionell ist die Interaktion mit Robotern darauf beschränkt, dass dem Roboter Kommandos zugesandt werden (in der Regel als textuelle Kommandos, seltener per Sprache) und der Roboter über geeignete Sensorik (Kameras, Mikrofone, Laserscanner, …) seine Umgebung wahrzunehmen versucht. Was dabei in der Interaktion mit Menschen entsteht, ist allerdings häufig eine holprige, wenig natürliche und dadurch für Menschen oft anstrengende Interaktion. Dass man auf diese Art und Weise auch Menschen mit Robotern interagieren lässt, die nicht an der Entwicklung beteiligt waren und dadurch nicht Verständnis für diese Schwierigkeiten aufbringen, passiert daher eher selten.
Eine Form der Interaktion, die sehr viel natürlicher ist, weil sie durch die physische Rückkopplung sehr viel direkter ist, ist die direkte Berührung und damit das Führen des Roboters. Der Mensch fasst den Roboter an der Hand (sofern er eine solche besitzt) und leitet den Roboter an. In der Robotik ist dies ein relativ aktueller Zweig der sogenannten Mensch-Maschine-Interaktion (MMI, Human Machine Interaction – HMI). Im Umfeld der industriellen Robotik sind ähnliche Techniken unter den Begriffen Teach-In und Kinestethic Teaching zu finden.
Es gibt mehrere Möglichkeiten, einen Roboter für diese Form der Interaktion auszustatten. Eine Möglichkeit ist es, die Hardware des Roboters bewusst so zu konstruieren, etwa durch die Integration von mechanischen Federn in Struktur des Roboters, dass dieser nachgiebig ist. Diese Art der Nachgiebigkeit wird in der Robotik bzw. Regelungstechnik als Passive Nachgiebigkeit (engl.: Passive Compliance) bezeichnet, da sie – einmal verbaut – das System ohne weiteres Zutun dauerhaft nachgiebig gestaltet.
Eine aufwendigere, aber dafür auch flexiblere Möglichkeit ist die Aktive Nachgiebigkeit (engl.: Active Compliance). Hierbei kann die Roboterhardware mechanisch völlig steif sein; die Nachgiebigkeit des Systems wird durch eine entsprechende Ansteuerung der Motoren simuliert. Dafür ist der Roboter mit Kraftsensorik ausgerüstet, die dem System konstant die auf den Roboter einwirkenden externen Kräfte meldet. Eine geschickte Regelung (Wikipedia) lässt den Roboter dann auf diese Kräfte auf die gleiche Art und Weise reagieren, wie es eine reale Feder tun würde: Bei kleiner Krafteinwirkung gibt der Roboter mit einer kleinen Bewegung nach, bei größerer Krafteinwirkung reagiert der Roboter mit einer deutlicheren Ausweichbewegung. Nicht, weil die Motoren nicht kräftig genug wären, den Kräften entgegenzuhalten, sondern weil dieses Verhalten den Eindruck eines weichen, nachgiebigen Systems erweckt und erwecken soll. Wie so eine Interaktion aussehen kann, zeigt das folgende Video:
Der iCub wird geführt und kann Objekte ertasten
Nachgiebigkeit ist dabei allerdings nicht allein für Interaktion eingesetzt; es ist auch ein enormer Sicherheitsaspekt. Ein Roboter, der mit seiner Umgebung (im schlimmsten Fall dem Menschen) kollidiert, weil er sie nicht richtig erkannt hat, richtet potentiell deutlich weniger Schaden an, wenn er nachgiebig ist; Schaden an sich und der Umwelt. Dies gilt für passive Nachgiebigkeit, genauso wie für aktive Nachgiebigkeit, wie das Deutsche Luft- und Raumfahrtzentrum im folgenden Video eindrücklich und mit offenbar ausreichend Vertrauen in die Technik beweist; am Ende des Videos mit Messer und einem menschlichen Probanden:
Im nächsten Monat, am 11. November, wird der Film Plug & Pray in die deutschen Kinos kommen. Ich hatte schon vor einigen Wochen das Vergnügen, den Film in trauter Runde während der iCub Summer School zu sehen, von der auch Szenen im Film zu sehen sind (unter anderem mit dem Slogan des Filmes „Dafür werden wir alle exkommuniziert“).
Der iCub im Film „Plug & Pray“
Die Visionen, die heutzutage wegen fortschreitender Technik rund um die künstliche Intelligenz und die Robotik entstehen, sind längst auf dem Level der Science-Fiction des letzten Jahrhunderts angekommen. Auch wenn es technisch an so vielen Stellen noch hapert, sind diese Visionen auch in der Forschung präsent. So wird im Film zum Beispiel Hiroshi Ishiguro gezeigt, der sich einen Roboter nach seinem Abbild geschaffen hat, den Geminoid. Oder der iCub, der einem Kind nachgebildet ist und wie ein Kind lernen und seine Umgebung entdecken soll. Oder Ray Kurzweil, seit Jahren in den USA gefeierter Visionär, der seit einiger Zeit die baldige Verschmelzung von Mensch und Maschine und das menschgemachte Vorantreiben der Evolution predigt.
Plug & Pray ist ein Dokumentarfilm und stellt aktuelle Visionen, Überzeugungen und den Alltag von Forschungsinstituten und Wissenschaftlern weltweit vor, die sich mit künstlicher Intelligenz und Robotik beschäftigen. Durch die schonungslose und gut recherchierte Darstellung der Szene und den zum Teil von den Wissenschaftlern leichtfertig vorgetragenen Fantasien ist der Film durchaus provokant und vielleicht sogar verängstigend. Er nimmt dabei allerdings seine dargestellten Protagonisten ernst, bleibt menschlich und liebevoll, ist niemals reißerisch und lässt Platz zum Nachdenken.
Anstrengend wird der Film dadurch nicht, dass er nie wirklich technisch wird und vor allem durch den wunderbaren, mittlerweile leider verstorbenen Joseph Weizenbaum, einem der Computerwissenschaftler des letzten Jahrhunderts, der mit Humor und scharfem Verstand den roten Faden des Filmes bildet. Immer wieder sind Interviewschnipsel und Alltagsszenen mit ihm eingestreut, die die zum Teil verstörenden Szenen einordnen und in der normalen Welt erden. Dass dies ausgerechnet einem Computerwissenschaftler gelingt, der mit ELIZA (Wikipedia) einen der Meilensteine der künstlichen Intelligenz geschaffen hat, ist erstaunlich und beruhigend zugleich.
Gut recherchiert, nachdenklich, humorvoll und mit durchdachter Einordnung der gesellschaftlichen Relevanz ist Plug & Pray ein Film für Menschen vom Fach, Technik-Interessierte und jeden, den ein Zweig unserer Zukunft interessiert, der gerade rasant entsteht und der immer noch ziemlich unberechenbar ist.
Trailer zum Film „Plug & Pray“
Anschauen dringend empfohlen.
PLUG & PRAY ist erschütternd und packend. Joseph Weizenbaum, mit der Gabe des Humors ausgestattet, verkörpert den gesunden Menschenverstand, während um ihn herum der Wahnsinn geadelt wird.“
Auch wenn ich die letzten Tage inaktiv war, waren es die deutschsprachigen Medien dankenswerterweise nicht und haben weiter über die Robotik berichtet; in diesen Tagen zudem auch vermehrt über Fahrerassistenz und autonomes Fahren. Hier ein paar Links zum autonomen Fahren, Roboter-Apotheken, technischen und ethischen Fragen …
FahrerassistenzChristoph Walter macht sich in der Märkischen Gedanken über die mit Fahrerassistenten zunehmend autonomer werdenenden Autos und welche Gefahren dies haben kann. „Sie bremsen, lenken, halten die Spur. Woran es den elektronischen Unfallverhütern mangelt, ist ein Verantwortungsbewusstsein.“Verführer Fahrerassistent – Bloß nicht den Verstand verlieren(Märkische Allgemeine, Christoph Walter, 15. Oktober 2010)Roboter-EthikInterview mit Ron Arkin, Informatik-Professor und Robotiker am Georgia Institute of Technology, der sich unter anderem in den letzten Jahren in einem von der US Army finanzierten Projekt mit dem ethischem Verhalten von autonomen Systemen beschäftigt hat. Das Interview dreht sich um die Ethik von Militärrobotern und Kampfmaschinen. „Wir [haben] dann ein System entwickelt und getestet, das in der Lage sein sollte, sich am Kriegsvölkerrecht zu orientieren.“Sind Roboter die besseren Soldaten?(Telepolis, Hans-Arthur Marsiske, 18. Oktober 2010)Robotertechnik„Um wie menschliche Hände agieren zu können, müssen die Roboter Gegenstände abtasten, greifen, anheben und an anderer Stelle behutsam ablegen können“. In diesem Artikel von WELT Online geht es um neue Techniken der Robotik, um die künstlichen Gliedmaßen unter den immer komplexer werdenden Anforderungen zu bewegen: Interaktion, hohe Geschwindigkeit und Präzision.Roboter decken den Tisch – und räumen wieder ab(WELT Online, Stefanie Gaffron, 13. Oktober 2010)RoboterapothekeGolem schreibt zum Anlass einer in einem Krankenhaus in Schottland in Betrieb genommenen robotischen Apotheke über erste dortige Erfahrungen. „Dieses System erspare den Schwestern viel Zeitaufwand, sagte Helen Paterson, die stellvertretende Pflegeleiterin. Früher hätten sie ein Rezept per Hand ausfüllen und es dann in die Apotheke bringen müssen. Diese Zeit könnten sie jetzt den Patienten widmen.“Weniger Kosten, weniger Fehler(Golem, Werner Pluta, 19. Oktober 2010)Fahrerloses Fahren„Intelligente Autos werden die Straßen erobern“, schreibt Lisa Reggentin im Stern und bezieht sich damit auf die jüngsten Aktivitäten mit autonom fahrenden Autos von Google und der TU Braunschweig. 2030 soll dies dann Alltag auf den Straßen sein.Die Zukunft der Roboter-Autos – Revolution auf der Straße(Stern, Lisa Reggentin, 16. Oktober 2010)
Über Hinweise zu lesenswerten Artikeln freue ich mich jederzeit. Entweder per Kommentar oder per E-Mail anbotzeit@ohmpage.org
Da ich es in den letzten Wochen wegen akuter Überarbeitung nicht zu enormer Aktivität geschafft habe und sich das vermutlich in den nächsten Tagen erst einmal nicht ändern wird, hier schon einmal ein paar Links der letzten Wochen. Über Roboter, die sich entschuldigen, selbständige Mondfähren und die Zusammenarbeit von Mensch und Roboter. Und nun geht’s ab nach Oslo …
Soziale Roboter„Ich weiß, es ist schwierig mit mir zu arbeiten“, sagt der Roboter. Welche Fähigkeiten und Verhalten benötigen Roboter, damit Menschen sie als angenehme Gesellschaft empfinden und sich in Anwesenheit von Robotern wohlfühlen? Das „Exzellenzcluster Cognitive Interaction Technology“ (Citec) in Bielefeld geht dieser Frage nach.Ich weiß, es ist schwierig mit mir zu arbeiten(Süddeutsche, Katrin Blawat, 18. August 2010)LaufmaschineArtikel über die Laufmaschine BioBiPed, die im Rahmen eines Forschungsprojekts des Lauflabors Jena und der TU Darmstadt wntwickelt wird. Das Außergewöhnliche: Der Roboter soll zuerst rennen und dann erst gehen lernen.Eine Laufmaschine lernt gehen(Heise Online, Hans-Arthur Marsiske, 20. August 2010)Weltraum-RobotikBis 2018 will Weltraumorganisation ESA ein unbemanntes Raumschiff zum Mond fliegen lassen. „Die Mondfähre muss Hindernisse, steile Hänge und Krater beim Anflug erkennen, ihnen ausweichen und selbstständig einen geeigneten Landeplatz suchen können“, ein typischer Anwendungsfall der explorativen Robotik.Europäische Roboter sollen 2018 auf Mond landen(Spiegel Online, Cinthia Briseño, 16. September 2010)Servicerobotik„Milliardenmarkt Maschinenmensch“ – Das Handelsblatt beobachtet, dass Roboter aus den Werkshalle, also dem industriellen Umfeld, mehr und mehr in den Alltag wandern. Ob in der Medizintechnik, zur Pflege oder als Staubsauger- und Spielroboter.Roboter laufen aus den Werkshallen(Handelsblatt, Martin Murphy und Hans Schürmann, 29. September 2010)Roboter-Ethik„Roboter sollen nicht töten dürfen“ – Tina Klopp schreibt über die Fiktion eines bloodless war, eines Krieges ohne Verluste, und von der Forderungen des Ethikers Rob Sparrow nach einem Menschenrecht, nicht von Robotern getötet zu werden.Roboter sollen nicht töten dürfen(ZEIT Online, Tina Klopp, 27. September 2010)Roboter als MitarbeiterDer Industrieroboterbauer Reis Robotics will zusammen mit fünf Partnern aus Industrie und Forschung in den nächsten drei Jahren daran arbeiten, Roboter ohne räumliche Trennung mit Menschen zusammenarbeiten zu lassen. Eine Aufgabe, die wegen der Kraft und des Gewichts von Robotern dringend Sicherheitsfragen aufwirft.Roboter sollen Hand in Hand mit Menschen arbeiten(Main-Netz, Nina-Anna Beckmann, 29. September 2010)
Über Hinweise zu lesenswerten Artikeln freue ich mich jederzeit. Entweder per Kommentar oder per E-Mail anbotzeit@ohmpage.org
{kind=link}