Einen Vorgeschmack zur weiteren Entwicklung in der Robotik hat das Deutsche Zentrum für Luft- und Raumfahrt (DLR) in den letzten Tagen geliefert:
Angetriggert von einem Artikel in der IEEE Spektrum, wie ich annehme, berichteten in den letzten Tagen allerhand englischsprachige Robotik-Blogs (z.B.) über die neue Roboterhand, die das DLR vorgestellt hat.
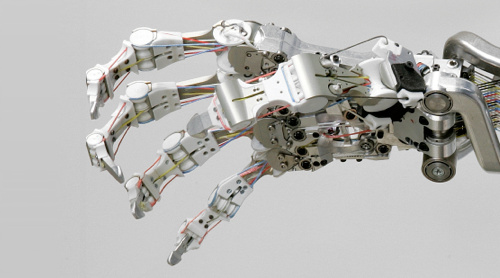
Die Hand sieht nicht nur spektakulär aus, ihre wahre Sensation liegt zum einen in ihrer Ähnlichkeit zur menschlichen Hand und vor allem in ihrer Robustheit. Die Ähnlichkeit zur menschlichen Hand liegt maßgeblich im (technische) Design begründet, das dem Bewegungsapparat der menschlichen Hand sehr Nahe kommt. Dass die Hand in den Blogs dieser Welt unter Bezeichnungen wie Super Robust Robot Hand geführt wird, ist darin begründet, dass das DLR zeigen kann, dass diese Hand selbst mehrere Schläge mit einem Hammer überlebt; mit nahezu allen bisherigen Robotik-Bauteilen absolut undenkbar. Vor allem, wenn sie dafür nicht in eine Schutzhülle eingepackt sein müssen und sich dabei noch so präzise bewegen können.
Hier im Video ist die Hand zu sehen und wie mit ihr umgegangen wird:
Schon auf der Automatica im letzten Jahr zeigte das DLR die Hand plus angeschlossenem Unterarm und zog damals schon viele Blicke auf sich. Dass die Robotik-Abteilung des DLR um Hirzinger plant, sozusagen als nächsten großen Wurf, dieses Designprinzip innerhalb der nächsten fünf Jahr in einen Vollkörper-Humanoiden fließen zu lassen, stimmt mich äußerst erwartungsvoll. Der Plan ist, so hört man aus eingeweihten Kreisen, innerhalb der nächsten fünf Jahre die Hardware des Roboter fertigzuhaben und in weiteren fünf Jahren den Roboter vollständig zu beherrschen, so dass er rennen und Treppen rauf- und runterspringen kann. Und wem ist das mehr zuzutrauen, als dem DLR, nachdem die Robotik-Abteilung zuletzt mit dem Leichtbau-Industriearm gezeigt hat, zu welchen technologischen Sätzen man dort in den Lage ist.
Was diese Hand so besonders robust macht, ist ihr durchdachtes Design, moderne Materialien, aber vor allem die Verwendung von künstlichen Sehnen zur Bewegung der Finger. Diese erlauben es, plötzlich auftretenden Kräften nachzugeben (wie zum Beispiel bei einem Aufprall), so dass die Struktur der Hand und die Elektronik von diesen Kräften nicht verletzt wird. Weiterhin wurden die Sehnen in einer Art und Weise verbaut, die es erlauben, ihre Steifigkeit zu verändern. Also etwa steife Sehnen für einen möglichst präzisen Griff und weniger steife Sehnen, wenn es darum geht, unbekannte Gegenstände zu ertasten, oder empfindliche Objekte sanft zu greifen.
Mit insgesamt 19 Freiheitsgraden ist die Hand außerdem ähnlich bewegungsfähig wie unsere Hand (die gerade einmal einen Freiheitsgrad mehr hat). Bei der Konstruktion haben die Bauer darauf achtgegeben, dass die Bewegungsabläufe der Finger denen menschlicher Finger sehr nahe kommen, was diese Hand insgesamt mit all den obigen Faktoren zur aktuell wahrscheinlich coolsten Roboterhand für Humanoide macht. Der Konferenzbeitrag 1 zu der Hand und diesem Arm wurde auf der HUMANOIDS-Konferenz im Dezember in Nashville folgerichtig mit dem Best Paper Award ausgezeichnet. Dort zeigte der Vortragende Grebenstein im Video, wie mit einem Baseball-Schläger auf den Arm eingeschlagen wird, ohne dass dieser Schaden nimmt. Und das – das macht es so beeindruckend – nicht etwa mit ausgeschalteten Motoren und schlaff herumhängend, sondern in voller Positionsregelung. Ein gehöriger Unterschied, muss man doch bislang mit Robotern jede Bewegung im Vorhinein in Simulation ausführen, um jede Kollision mit eigenen Körperteilen oder anderen Objekten und eine damit einhergehende Beschädigung des Roboters auszuschließen.
Auf den Humanoiden des DLR in diesem Design kann man nur gespannt sein. Mehr und mehr beeindruckende Humanoide hat man in den letzten zwei Jahren die Weltbühne betreten sehen. Aber ein Leichtbau-Roboter, der in jedem Detail so durchdacht und so technologisch fortgeschritten ist, wie es uns mit der DLR-Hand gezeigt wurde, dürfte ein neues Niveau erreichen.

