Grundsätzlich wird die strukturelle Elastizität in Roboter-Armkörpern bislang nachteilig gesehen. Sie verlängert Ausregelzeiten und verschlechtert die Positioniergenauigkeit. Allerdings wurde die Realisierbarkeit einer schnellen und genauen Positionierung eines gliedelastichen Roboterarms anhand von Ballfang-Experimenten exemplarisch gezeigt 1. Darüber hinaus kann die intrinsische Nachgiebigkeit jedoch auch vorteilhaft dazu ausgenutzt werden, die tatsächlich effektive Nachgiebigkeit des gesamten Arms aktiv zu beeinflussen. Wie im ersten Teil zu diesem Thema bereits dargestellt, setzt dies eine Kompensation der unerwünschten Effekte durch eine geeignete unterlagerte Regelung voraus. Dabei wurde die Wahrscheinlichkeit, auch zerbrechliche Objekte im Falle einer unvorhergesehenen Kollision zu beschädigen, deutlich gemindert.
Das obenstehende Video geht einen Schritt weiter. Beabsichtigte oder auch unbeabsichtigte Kontakte werden explizit auf Basis eines Modells der gedämpften Armdynamik detektiert und ermöglichen eine entsprechende Reaktion. Das Video stellt das gliedelastische Experimentalsystem TUDOR vor und zeigt insgesamt sieben Experimente zur Schwingungsdämpfung, zur Detektion genau wiederholbarer stumpfer wie auch scharfer Einschläge auf Luftballons sowie zerbrechlicher Christbaumkugeln, weniger exakt wiederholbarer Einschläge auf einen menschlichen Arm und schließlich zur physischen Interaktion mit dem Roboter.
Die Paare von Dehnungs-Messstreifen, die in der Nähe der Gelenke auf jedem nachgiebigen Arm appliziert sind, fungieren als lastseitige Drehmomentsensoren. Unter der Voraussetzung einer hinreichenden Schwingungsdämpfung kann die verbliebene Dynamik des Arms in Analogie zu konventionellen starren Roboterarmen modelliert werden. Diese Vorgehensweise ermöglicht die unmittelbare Anwendung von Verfahren zur Kollisionsdetektion und -reaktion, wie sie zuvor bei gelenkelastischen sowie starren Roboterarmen vorgestellt worden sind 2 .
Die dargestellen Ergebnisse verdeutlichen, dass die strukturelle Elastizität in Roboter-Armkörpern nicht zwingend als nachteilig gesehen werden muss. Vielmehr können sich mit Hilfe entsprechender Regelungsansätze aus der Ausnutzung dieser Eigenschaften neue Möglichkeiten ergeben.
Die Vermeidung unerwünschter elastischer Effekte stellt eine große Herausforderung bei der Konstruktion von Robotern dar. Sie erschweren die präzise Positionierung des Roboterarms aufgrund statischer lastabhängiger Verbiegungen und schwingen nach jeder Bewegung nach. Vergleichbare Beispiele, bei denen Elastizitäten meist unerwünscht sind, finden wir fernab der Robotik bei Baumaschinen, wie Auto-Betonpumpen, Hubwagen aber auch Feuerwehrdrehleitern.
Wie wäre es, wenn auf die Steifigkeit bei der Auslegung einer Maschine weniger Wert gelegt werden müsste, da den damit einhergehenden unerwünschten Effekten mit regelungstechnischem Mitteln begegnet werden kann? Mechanische Strukturen könnten mit schlicht weniger Material leichter gebaut werden. Infolge dessen ließen sich Antriebe kleiner dimensionieren und hätten einen geringeren Energiebedarf.
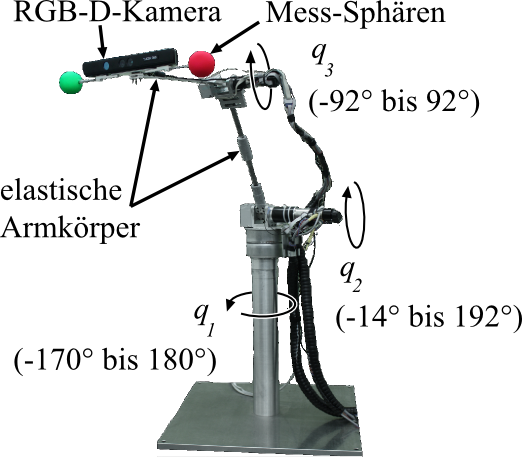
Dieser Gedanke ist genau die Idee hinter dem Forschungsthema, dass ich bearbeite. Im Rahmen des Forschungsthemas haben wir den nachfolgend dargestellten gliedelastischen Roboterarm TUDOR als Experimentalsystem entwickelt.
Das gliedelastische Experimentalsystem TUDOR
Er wird von drei bürstenlosen Gleichstrommotoren angetrieben und besitzt zwei Federstahlbalken als elastische Armkörper. Bei einer typischen Punkt-zu-Punkt-Bewegung der Antriebe treten Schwingungsamplituden von bis zu 10 cm auf.
Auf den Roboter-Konferenzen dieser Welt werden aktuell viele Beiträge zu Robotern mit elastischen Komponenten vorgestellt. Die elastischen Komponenten werden meist in die Robotergelenke integriert. Ein sehr heißes Thema sind vor allem Gelenke, bei denen sich die elastischen Eigenschaften der Komponenten aktiv variieren lassen. Die Elastizitäten bewirken, dass die aufgrund der hohen Getriebeübersetzung üblicher Roboterarme sehr großen Trägheitsmomente der Antriebe von den Trägheitsmomenten des übrigen Arms entkoppelt werden. Das bedeutet, dass im Falle eines physischen Kontakts mit dem Roboter der Interaktionspartner eine geringere Trägheit des Armes „sieht“. Damit kann beispielsweise eine Verringerung des Gefährdungspotenzials des Roboters erzielt werden. Auf der anderen Seite speichern die Elastizitäten zusätzliche Energie, die im Falle eine Kollision freigesetzt und wiederum ein erhöhtes Gefahrenpotential (Peitscheneffekt) zur Folge haben kann. Häufig werden Elastizitäten eingesetzt, um dem Roboter zu natürlicheren und auch dynamischen Bewegungen zu verhelfen. Es ist festzuhalten, dass durch eine geeignete Regelung gezielt eingesetzte elastische Komponenten zahlreiche Möglichkeiten eröffnen.
Aus regelungstechnischer Sicht sind die elastischen Eigenschaften in den Robotergelenken am einfachsten zu beherrschen. Hier ist die Elastizität entlang der Wirkachse der Antriebe konzentriert. Überwiegt die Elastizität in den Roboter Armkörpern, so sind die elastischen Eigenschaften entlang der Armkörper und senkrecht zur Wirkachse der Antriebe verteilt. Die dadurch entstehenden Laufzeiteffekte erschweren eine Regelung des Roboterarms. Dies mag der Grund sein, aus dem derzeit vorwiegend Arbeiten zu gelenkelastischen Roboterarmen publiziert werden.
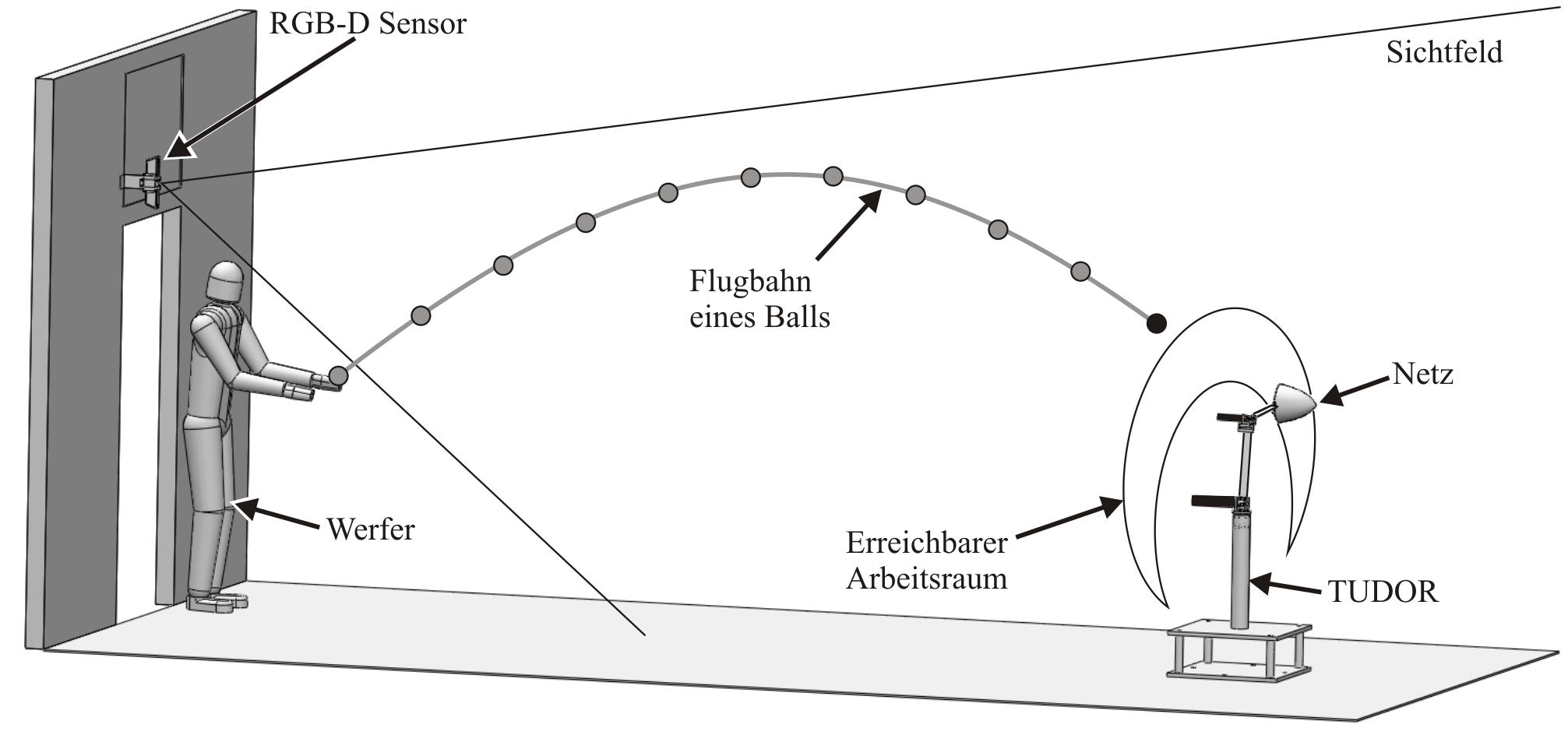
Mit TUDOR hat uns zunächst die Frage interessiert, ob wir mit einem gliedelastischen Roboterarm trotz der Schwingungen und last- und konfigurationsabhängigen variablen Verbiegungen eine zielgerichtete Aufgabe präzise in geforderter Zeit erledigen können. Als Demonstration hierzu haben wir uns, wie im nachfolgenden Bild dargestellt, das Fangen eines Balles ausgedacht.
Ballfangen-Szenario
Ein menschlicher Werfer wirft den Ball in Richtung des Roboters. Die Flugbahn wird mittels einer Kinect-Kamera ermittelt und der Durchstoßpunkt der Flugbahn mit der Bewegungsebene des Roboters berechnet. Bevor der Ball am Roboter vorbei fliegt, bewegt der Roboter ein am Armende montiertes Netz dorthin und fängt den Ball damit auf. Das Resultat haben wir im nachfolgenden Video zusammengefasst:
A multi-link-flexible robot arm catching thrown softballs.
Sofern die Schwingungen regelungstechnisch unterdrückt und Abweichungen aufgrund statischer Verbiegungen kompensiert werden können, ließen sich in manchen Anwendungen diese elastischen Eigenschaften vielleicht nicht mehr nur als Problem verstehen. Vielmehr könnten elastische Eigenschaften vielleicht auch ausgenutzt werden, um beispielsweise Kontaktsituationen zu erkennen und darauf zu reagieren. Mit aktiv geregelten moderat gelenkelastischen Roboterarmen wurde dies ja bereits eindrucksvoll gezeigt.
Bezüglich gliedelastischer Roboter ist die Dämpfung auftretender Schwingungen bislang noch das dominierende Thema in Publikationen.
In den vergangenen Tagen konnten wir hier womöglich einen ersten Schritt über die reine Schwingungsdämpfung hinaus machen. Basierend auf einer Kraftregelung ist es uns gelungen ein Regelungskonzept zu entwickeln, bei dem wir die Schwingungen der mechanischen Struktur eines Roboterarms unterdrücken und zugleich die Nachgiebigkeit aktiv beeinflussen können. Einige Experimente dazu haben wir in nachfolgendem Video festgehalten:
Video zur Kraftregelung eines gliedelastischen Roboterarms
In dem Regelungskonzept wird die Information über die auf die Robterarme einwirkenden Kräfte mittels Dehnungsmessstreifen erfasst und individuell auf die Antriebsregler zurückgeführt. Auf diese Weise werden Schwingungen in der Armstruktur unterdrückt obgleich sie von der Gelenkbewegung oder der Interaktion mit der Umgebung herrühren. Zusätzlich lässt sich die Nachgiebigkeit des Roboterarms derart beeinflussen, dass wir mit sehr wenig Kraft den Roboterarm aus seiner aktuellen Position schieben können und die Wahrscheinlichkeit fragile Objekte bei einer unvorhergesehnen Kollision zu zerbrechen deutlich reduziert wird.
Also: elastische Roboterarmkörper – Fluch oder Segen? Trotz dieser Experimente sind noch zahlreiche Herausforderungen zu meistern und fragen zu beantworten. Dennoch scheint es mir, als schlummertem in den Elastizitäten der Armkörper nicht nur Probleme, sondern auch Potenziale.
Ich freue mich darauf zu sehen, wo die Reise noch hinführen wird.
Traditionell ist die Interaktion mit Robotern darauf beschränkt, dass dem Roboter Kommandos zugesandt werden (in der Regel als textuelle Kommandos, seltener per Sprache) und der Roboter über geeignete Sensorik (Kameras, Mikrofone, Laserscanner, …) seine Umgebung wahrzunehmen versucht. Was dabei in der Interaktion mit Menschen entsteht, ist allerdings häufig eine holprige, wenig natürliche und dadurch für Menschen oft anstrengende Interaktion. Dass man auf diese Art und Weise auch Menschen mit Robotern interagieren lässt, die nicht an der Entwicklung beteiligt waren und dadurch nicht Verständnis für diese Schwierigkeiten aufbringen, passiert daher eher selten.
Eine Form der Interaktion, die sehr viel natürlicher ist, weil sie durch die physische Rückkopplung sehr viel direkter ist, ist die direkte Berührung und damit das Führen des Roboters. Der Mensch fasst den Roboter an der Hand (sofern er eine solche besitzt) und leitet den Roboter an. In der Robotik ist dies ein relativ aktueller Zweig der sogenannten Mensch-Maschine-Interaktion (MMI, Human Machine Interaction – HMI). Im Umfeld der industriellen Robotik sind ähnliche Techniken unter den Begriffen Teach-In und Kinestethic Teaching zu finden.
Es gibt mehrere Möglichkeiten, einen Roboter für diese Form der Interaktion auszustatten. Eine Möglichkeit ist es, die Hardware des Roboters bewusst so zu konstruieren, etwa durch die Integration von mechanischen Federn in Struktur des Roboters, dass dieser nachgiebig ist. Diese Art der Nachgiebigkeit wird in der Robotik bzw. Regelungstechnik als Passive Nachgiebigkeit (engl.: Passive Compliance) bezeichnet, da sie – einmal verbaut – das System ohne weiteres Zutun dauerhaft nachgiebig gestaltet.
Eine aufwendigere, aber dafür auch flexiblere Möglichkeit ist die Aktive Nachgiebigkeit (engl.: Active Compliance). Hierbei kann die Roboterhardware mechanisch völlig steif sein; die Nachgiebigkeit des Systems wird durch eine entsprechende Ansteuerung der Motoren simuliert. Dafür ist der Roboter mit Kraftsensorik ausgerüstet, die dem System konstant die auf den Roboter einwirkenden externen Kräfte meldet. Eine geschickte Regelung (Wikipedia) lässt den Roboter dann auf diese Kräfte auf die gleiche Art und Weise reagieren, wie es eine reale Feder tun würde: Bei kleiner Krafteinwirkung gibt der Roboter mit einer kleinen Bewegung nach, bei größerer Krafteinwirkung reagiert der Roboter mit einer deutlicheren Ausweichbewegung. Nicht, weil die Motoren nicht kräftig genug wären, den Kräften entgegenzuhalten, sondern weil dieses Verhalten den Eindruck eines weichen, nachgiebigen Systems erweckt und erwecken soll. Wie so eine Interaktion aussehen kann, zeigt das folgende Video:
Der iCub wird geführt und kann Objekte ertasten
Nachgiebigkeit ist dabei allerdings nicht allein für Interaktion eingesetzt; es ist auch ein enormer Sicherheitsaspekt. Ein Roboter, der mit seiner Umgebung (im schlimmsten Fall dem Menschen) kollidiert, weil er sie nicht richtig erkannt hat, richtet potentiell deutlich weniger Schaden an, wenn er nachgiebig ist; Schaden an sich und der Umwelt. Dies gilt für passive Nachgiebigkeit, genauso wie für aktive Nachgiebigkeit, wie das Deutsche Luft- und Raumfahrtzentrum im folgenden Video eindrücklich und mit offenbar ausreichend Vertrauen in die Technik beweist; am Ende des Videos mit Messer und einem menschlichen Probanden: