Allmonatlich findet am ersten Donnerstag im Monat der Robotik-Stammtisch NRW statt. Wegen der Herkunft der Gründungs- und ständigen Mitglieder wechselt der Stammtisch in der Regel zwischen Dortmund und Bielefeld, in diesem Monat wird er allerdings zum zweiten Mal in Düsseldorf stattfinden, um auch Robotiker aus dem südlichen NRW kennenzulernen.
Wir freuen uns auf neue Gesichter, mit denen wir entspannt ein Getränk zu uns nehmen und über Robotik plaudern können.
Wer an weiteren Terminen und Robotik in NRW interessiert ist, dem sei auch die Robotik-Mailingliste ans Herz gelegt: robotiknrw@lists.cit-ec.uni-bielefeld.de Die Anmeldung ist frei.
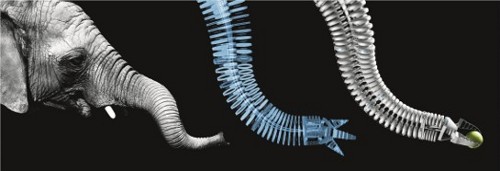
Festos Bionic Handling Assistent (BHA), inspiriert von einem Elefantenrüssel
Schon vor gut einem Jahr habe ich über Festos Bionic Handling Assistent (BHA) geschrieben, der damals frisch mit dem Deutschen Zukunftspreis gekrönt war. Wir haben einen von diesen Robotern bekommen und im April letzten Jahres haben wir bereits hier über unsere ersten Gehversuche und die Simulation des Roboters geschrieben. In diesem Artikel wird es nun darum gehen, wie wir von Babys gelernt haben, den Roboter zu kontrollieren.
Vor einigen Wochen wurde der BHA in der Sendung mit der Maus gezeigt. Wer das Video bis zu Minute 5:00 verfolgt, bekommt jedoch den Haken mit: so faszinierend der Roboter, insbesondere der BHA, auch ist … es ist ebenso kompliziert, ihn zu bewegen.
Die Sendung mit der Maus – Festos BHA und Robotino
In der Sendung und bei den meisten Vorführungen des Roboters steht daher jemand an einer Fernbedienung, oder öffnet und schließt händisch die Ventile, wie zu Beginn des Videos zu sehen. Von einem praktischen Einsatz, bei dem der Roboter eigenständig Aufgaben erledigt, ist das noch meilenweit entfernt.
Das liegt unter anderem daran, dass der Rüssel anders ist, als andere Roboter. Seine elastischen Bewegungen sind sehr schwierig und nur annähernd in mathematische Gleichungen zu fassen. Genau diese Bewegungsgleichungen benötigen aber die klassische Verfahren zur Robotersteuerung. Selbst unser Modell reicht dazu kaum aus, denn es kann keine Auskunft über die Reichweite der vielen Aktuatoren liefern. Diese müsste man sehr genau kennen um den Roboter (klassisch) ansteuern zu können: es ergeben sich schnell sehr große Fehler, wenn der Regler einem Aktuator einen Befehl gibt, der außerhalb seiner Reichweite liegt.
Was das Ganze noch schwieriger macht sind die Verzögerungen im Bewegungsverhalten: der Roboter bewegt sich mittels Luftkammern, die mit Druckluft aufgeblasen werden, die aber erst mit Verzögerung in den Kammern ankommt. Danach dauert es einige Zeit, mitunter bis zu 20 Sekunden, bis der Roboter seine neue Postur erreicht und sich stabilisiert hat. Diese Verzögerungen machen viele der sonst auf Robotern verwendeten Regler praktisch nutzlos, da sie schnelles und exaktes Roboterverhalten benötigen.
Schwierig … aber dafür gibt es maschinelle Lernverfahren, von denen es unzählige Methoden gibt, um Roboter Bewegungen lernen zu lassen. Zunächst muss man den Roboter seinen Bewegungsraum explorieren lassen, also ausprobieren welche resultierenden Bewegungen durch verschiedene Motorkommandos hervorgerufen werden. Da liegt allerdings schon die nächste Krux mit dem BHA, denn: es gibt sehr, sehr viele verschiedene Motorkommandos. Die Standard-Ansätze zum Lernen erfordern, sie alle auszuprobieren. Auf dem BHA benutzen wir aktuell neun Aktuatoren (die Luftkammern). Möchte man pro Aktuator nur 10 verschiedene Kommandos ausprobieren, ergeben sich bereits eine Milliarde (10^9) Kombinationen. Es würde Jahrzehnte dauern, würde man ernsthaft versuchen die alle auf dem Roboter zu explorieren. In der Praxis würde man daher eher zufällige Kommandos auswählen, und einfach irgendwann aufhören. Natürlich ändert das aber auch nichts daran, dass man eigentlich alle Kommandos ausprobieren müsste, damit das Bewegungslernen funktionieren kann.
Was tun?
Um diesem Problem zu begegnen, haben wir uns Inspiration aus der Biologie geholt. Die Aufgabe, den BHA-Rüssel kontrollieren zu lernen, ist nämlich in vielerlei Hinsicht der Aufgabe von Babys sehr ähnlich, in den ersten Lebensmonaten zu lernen, ihre eigenen Gliedmaßen zielgerichtet zu bewegen. Sie müssen dafür lernen, 600 Muskeln zu koordinieren, und sind dabei unglaublich effizient. Was ist also der Trick, den wir lernen müssen, wenn wir unsere Experimente mit dem BHA ähnlich effizient durchführen wollen?
Einen Hinweis liefert eine wegweisende Studie von Claes von Hosten aus dem Jahr 1982. Diese Studie konnte zeigen, dass selbst Neugeborene sich nicht ‐ wie es zuerst scheint ‐ zufällig bewegen, sondern von Beginn an zielgerichtet in Richtung bewegter Objekte greifen. Das folgende Bild zeigt dies unglaublicherweise bereits bei einem wenige Tage alten Baby:
Ein wenige Tage altes Neugeborenes zeigt bereits zielgerichtete Bewegung Richtung bewegter Objekte
Diese Erkenntnis wurde lange von der Machine Learning Community ignoriert, und sollte uns den entscheidenden Hinweis geben. Der von Matthias Rolf entwickelte Ansatz Goal Babbling, versucht nicht mehr durch zufällige Bewegungen den Bewegungsraum zu explorieren (Motor Babbling), sondern tut es von Anfang an zielgerichtet [Rolf et al., 2011]. Die Ergebnisse in Simulation waren vielversprechend, und haben gezeigt, dass dieser Ansatz auch mit 50 Freiheitsgraden zurecht kommt und nicht einmal mehr Zeit benötigt als für einen Roboter mit nur zwei Gelenken. Das ist ein entscheidender Vorteil gegenüber dem zufälligen Explorieren des Raumes, dessen Zeit zum Explorieren exponentiell mit der Anzahl der Dimensionen steigt. Mit Goal Babbling erhalten wir erste brauchbare Resultate bereits nach wenigen hundert Bewegungen, was sogar mit der Geschwindigkeit menschlichen Lernens vergleichbar ist [Sailer and Flanagan, 2005]. Wir können also offenbar wirklich mit der biologischen Vorlage das Lernen massiv beschleunigen! Zeit also, das biologisch-inspirierte Lernen auf dem biologisch inspirierten Roboter anzuwenden.
In unseren ersten Experimenten lernte der Roboter lediglich einfache Bewegungen des Greifers nach links und rechts. Nicht besonders nützlich, aber trotzdem beeindruckend als Live-Demonstration, denn der Roboter konnte innerhalb von zwei Minuten eigenständig lernen, seine neun Kammern zu koordinieren und diese Bewegung auszuführen. Schnell zeigte sich außerdem, wie gut das Verfahren mit Hardware-Defekten umgehen konnte, obwohl wir wahrlich nicht vor hatten, das herauszufinden. Eines Tages während der Experimente stellten wir jedoch ein kleines Loch in einer der Luftkammern fest, durch das Luft entwich: die Kammer konnte sich nicht mehr aufblasen. Schlimmer noch: die Kammer bewegte sich passiv wie eine mechanische Feder mit, was die Bewegung des gesamten BHA-Rüssels beeinflusste. Das Lernverfahren scherte das kaum. Es lernte einfach die anderen Aktuatoren entsprechend einzusetzen ‐ zusammen mit der passiven Bewegung des defekten Aktuators. Wohlgemerkt: wir mussten dem Verfahren dafür nicht mitteilen, dass etwas defekt war. So einfach kann es manchmal sein!
Eine ähnlich gute Entdeckung machten wir, als jemand den Roboter hin und her schob, während er grade explorierte und lernte. Durch das Anschubsen des Roboters konnte man ihm tatsächlich unter die Arme greifen und ihm zeigen, wie sinnvolle Bewegungen aussehen. Schiebt man ihn in die Richtung, in die er sich gerade bewegen will (also die richtige Richtung), spürt man bemerkenswerterweise kaum Widerstand vom Regler. Das Lernen geschieht in diesen Momenten so schnell, das der Roboter die Bewegung schon während des Führens in den gelernten Regler einarbeitet. Folglich reicht es aus, ihm die Bewegung ein einziges mal zu zeigen. Das Ganze ist überhaupt nur möglich, weil das ziel-gerichtete Explorieren und sehr schnelles kontinuierliches Lernen des Goal Babblings mit dem leichten, nachgiebigen BHA-Rüssel aufeinander treffen. Preis-gekrönte 1, biologisch inspirierte Hardware und preis-gekröntes 2, biologisch inspiriertes Lernen.
Bei dem gesamten Vorhaben leistete uns die vorher entwickelte Simulation des Bewegungsverhaltens gute Dienste. Auch wenn das Lernen und Explorieren auf dem echten Roboter stattfand, war die Simulation für allerhand Visualisierungen und zusätzliche Vorhersagen nützlich. So ließ sich nun die Bewegung des Roboters bezüglich selbst-generierter (und ausschließlich virtuell existierender) Ziele während des Lernens darstellen, und das Lernen auf dreidimensionale Ziele (anstatt nur links/rechts) erweitern. Wir konnten nun Einblick in das Lernen nehmen und live während des Lernens vorhersagen, wie gut der gerade lernende Regler verschiedene Positionen im Raum anfahren kann. Wir lernten dadurch, dass sich das Lernen auf dem echten Roboter ganz ähnlich entfaltet wie es unsere ersten Simulations-Experimenten 2010 bis Anfang 2011 (noch komplett ohne den BHA) gezeigt haben.
Biologisch inspiriertes Lernen auf einem biologisch inspirierten Roboter
Auf dem Rüssel liefert Goal Babbling schnell nützliche Ergebnisse. Nach dem Lernen lässt sich der Greifer mit ca. 2 cm Genauigkeit im Raum positionieren. Das ist nicht direkt perfekt, aber reicht in vielen Fällen schon aus, da der flexible Fin-Gripper Gegenstände großräumig mit seinen elastischen Fingern umschließt. Um den Rüssel so schnell und gezielt wie im Video bewegen zu können, darf man nicht auf Feedback (also Bewegungsantworten) vom Roboter warten, da das bei der Pneumatik zu lange dauert. Solch einen Regler, der ohne Feedback auskommt, liefert uns das Lernen. Dadurch weiß der Roboter sofort, wo er hin muss, anstatt sich langsam und Schritt für Schritt ans Ziel heranzutasten. Feedback ist dann lediglich eine zusätzliche Hilfe, die wie in der letzten Sequenz im Video zu sehen, die Genauigkeiten auf 6-8 mm erhöht. In Anbetracht der Tatsache, dass der Rüssel selbst permanent ca. 5 mm hin- und herschwankt, ist das beachtlich.
Erwähnenswert ist außerdem: das Ganze funktioniert nicht nur einmalig und im Video. Wir haben sehr ausgiebige Experimente dazu gemacht, und es funktionierte in jedem Durchgang. Das Lernen von links-/rechts-Bewegungen haben wir regelmäßig in Live-Demos gezeigt, in denen der Roboter binnen 1-3 Minuten seine Bewegungen lernt. Unter Anderem haben wir dies live auf der Automatica 2012 in München gezeigt, auf der das Live-Lernen mit dem Roboter und dem Objekt-Tracking aus dem Video vier Tage lang jeweils acht Stunden lief.
Die gute Nachricht lautet also: es funktioniert! Und es funktioniert robust!
Festos Bionic Handling Assistant ist ein großartiger, spannender Roboter. Er ist nicht nur ein Hingucker durch seine Ähnlichkeit mit dem Elefantenrüssel, sondern seine Struktur macht auch den Umgang und die Interaktion mit ihm natürlich und sicher. Um ihn allerdings auf ähnliche Art und Weise kontrollieren zu können, wie wir es mit anderen Robotern tun, mussten wir einige Hürden überwinden: Ausgangspunkt war ein Roboter ganz ohne Modell und nur mit einfacher Druckregelung. Stück für Stück haben wir ein Vorwärtsmodell der Kinematik, Simulation und Längenregelung hinzugefügt. Der entscheidende Punkt war allerdings, maschinelles Lernen, vor Allem das durch Beobachtung von Babys inspirierte Goal Babbling einzusetzen, das erstaunlich schnell lernt, den Roboter zu kontrollieren.
Jetzt, da wir den Rüssel kontrollieren können, um Objekte zu greifen und zu bewegen: Für welche Aufgaben sollten wir ihn jetzt unbedingt einsetzen?
Vom 7.-8. Oktober werden die dritten DGR-Tage der Deutschen Gesellschaft für Robotik in München stattfinden. Die Veranstaltung richtet sich wie in jedem Jahr primär an Doktoranden und junge Wissenschaftler der Robotik, und ist eine tolle nationale Bühne, um seine Arbeit vorzustellen und zu diskutieren:
„The purpose of the DGR-Days is to foster the scientific exchange among robotics researchers in Germany, in particular young researchers and doctoral students. The organizers are working on the further details which will be posted to the webpage soon.“
Robot Porn auf der Hannover Messe 2013. KUKA Robotics zeigt an seinem Stand eine spektakuläre Show für Roboter-Fans. Mehrere Roboter wirbeln durcheinander, große Roboter tragen sich bewegende kleinere Roboter und machen dabei mächtig was her:
Spektakuläre Show von KUKA Robotics auf der Hannover Messe 2013Spektakuläre Show von KUKA Robotics auf der Hannover Messe 2013
Gerade komme ich zurück vom letztwöchigen European Robotics Forum 2013 (ERF), eine faszinierende Veranstaltung rund um die europäische Robotik. Faszinierend wegen ihrer Mischung aus Politik, Industrie und wissenschaftlichen Beiträgen, und dabei auch getragen von anwesenden Personen, die zu den prominenten Vertretern der europäischen Robotik zählten.
Dass auf dem Forum zusammen mit den dortigen Anhörigen die Strategic Research Agenda für die Robotik-Forschung in den EU der nächsten Jahre mitentwickelt wird, gibt dem zusätzliches Gewicht. In Workshops knien CTOs großer europäischer Robotik-Unternehmen, Robotik-Wissenschaftler und Leiter von Forschungsinstituten gemeinsam um Poster herum, um über zukünftig wichtige Themen und deren Priorisierung zu debattieren. Der Entstehung der (inhaltlichen und politischen) Richtungsentscheidungen der nächsten Jahre in der europäischen Robotik zuzusehen und mitzubekommen, dass dies in einem durchaus konstruktiven Austausch zwischen Industrie und Wissenschaft geschieht, ist eigentlich recht beruhigend.
Wer sich für die strategische Ausrichtung der Robotik, deren zukünftige Themenfelder und Prioritäten, sowie vor allem für die industrielle und akademische Sicht darauf interessiert, für den ist das ERF vermutlich die lohnendste öffentliche Veranstaltung in Europa.
Ich habe viel mit anderen Robotikern sprechen können, Herrn Marsiske vom Heise-Verlag habe ich aber leider verpasst. Der war vor Ort und hat mehrfach über das ERF und die angegliederte Robotik-Messe INNOROBO berichtet:
Die Vermeidung unerwünschter elastischer Effekte stellt eine große Herausforderung bei der Konstruktion von Robotern dar. Sie erschweren die präzise Positionierung des Roboterarms aufgrund statischer lastabhängiger Verbiegungen und schwingen nach jeder Bewegung nach. Vergleichbare Beispiele, bei denen Elastizitäten meist unerwünscht sind, finden wir fernab der Robotik bei Baumaschinen, wie Auto-Betonpumpen, Hubwagen aber auch Feuerwehrdrehleitern.
Wie wäre es, wenn auf die Steifigkeit bei der Auslegung einer Maschine weniger Wert gelegt werden müsste, da den damit einhergehenden unerwünschten Effekten mit regelungstechnischem Mitteln begegnet werden kann? Mechanische Strukturen könnten mit schlicht weniger Material leichter gebaut werden. Infolge dessen ließen sich Antriebe kleiner dimensionieren und hätten einen geringeren Energiebedarf.
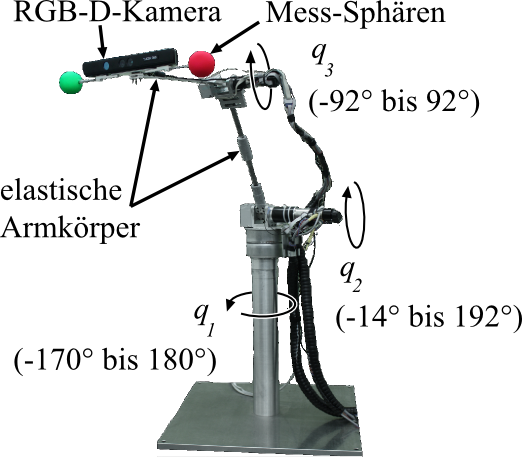
Dieser Gedanke ist genau die Idee hinter dem Forschungsthema, dass ich bearbeite. Im Rahmen des Forschungsthemas haben wir den nachfolgend dargestellten gliedelastischen Roboterarm TUDOR als Experimentalsystem entwickelt.
Das gliedelastische Experimentalsystem TUDOR
Er wird von drei bürstenlosen Gleichstrommotoren angetrieben und besitzt zwei Federstahlbalken als elastische Armkörper. Bei einer typischen Punkt-zu-Punkt-Bewegung der Antriebe treten Schwingungsamplituden von bis zu 10 cm auf.
Auf den Roboter-Konferenzen dieser Welt werden aktuell viele Beiträge zu Robotern mit elastischen Komponenten vorgestellt. Die elastischen Komponenten werden meist in die Robotergelenke integriert. Ein sehr heißes Thema sind vor allem Gelenke, bei denen sich die elastischen Eigenschaften der Komponenten aktiv variieren lassen. Die Elastizitäten bewirken, dass die aufgrund der hohen Getriebeübersetzung üblicher Roboterarme sehr großen Trägheitsmomente der Antriebe von den Trägheitsmomenten des übrigen Arms entkoppelt werden. Das bedeutet, dass im Falle eines physischen Kontakts mit dem Roboter der Interaktionspartner eine geringere Trägheit des Armes „sieht“. Damit kann beispielsweise eine Verringerung des Gefährdungspotenzials des Roboters erzielt werden. Auf der anderen Seite speichern die Elastizitäten zusätzliche Energie, die im Falle eine Kollision freigesetzt und wiederum ein erhöhtes Gefahrenpotential (Peitscheneffekt) zur Folge haben kann. Häufig werden Elastizitäten eingesetzt, um dem Roboter zu natürlicheren und auch dynamischen Bewegungen zu verhelfen. Es ist festzuhalten, dass durch eine geeignete Regelung gezielt eingesetzte elastische Komponenten zahlreiche Möglichkeiten eröffnen.
Aus regelungstechnischer Sicht sind die elastischen Eigenschaften in den Robotergelenken am einfachsten zu beherrschen. Hier ist die Elastizität entlang der Wirkachse der Antriebe konzentriert. Überwiegt die Elastizität in den Roboter Armkörpern, so sind die elastischen Eigenschaften entlang der Armkörper und senkrecht zur Wirkachse der Antriebe verteilt. Die dadurch entstehenden Laufzeiteffekte erschweren eine Regelung des Roboterarms. Dies mag der Grund sein, aus dem derzeit vorwiegend Arbeiten zu gelenkelastischen Roboterarmen publiziert werden.
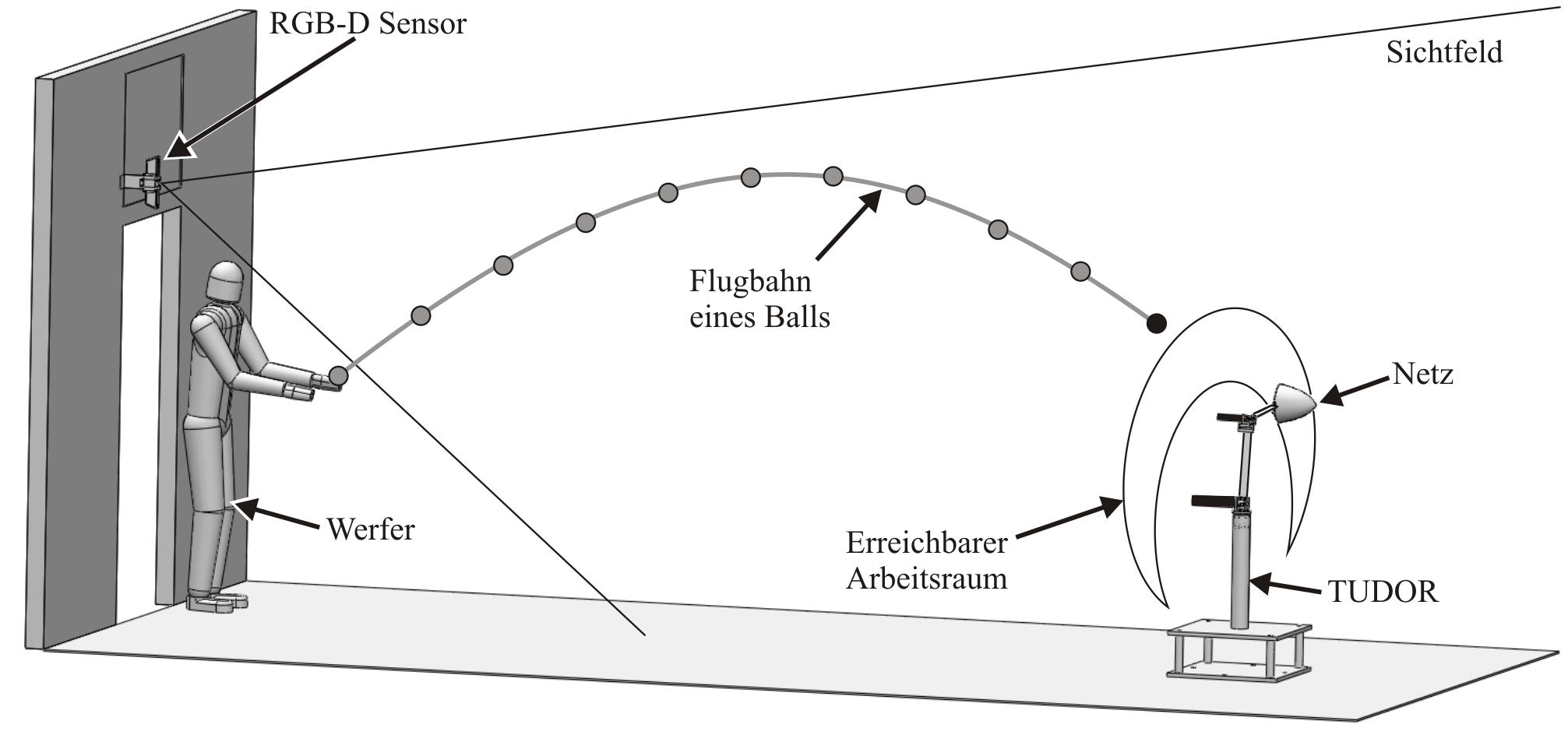
Mit TUDOR hat uns zunächst die Frage interessiert, ob wir mit einem gliedelastischen Roboterarm trotz der Schwingungen und last- und konfigurationsabhängigen variablen Verbiegungen eine zielgerichtete Aufgabe präzise in geforderter Zeit erledigen können. Als Demonstration hierzu haben wir uns, wie im nachfolgenden Bild dargestellt, das Fangen eines Balles ausgedacht.
Ballfangen-Szenario
Ein menschlicher Werfer wirft den Ball in Richtung des Roboters. Die Flugbahn wird mittels einer Kinect-Kamera ermittelt und der Durchstoßpunkt der Flugbahn mit der Bewegungsebene des Roboters berechnet. Bevor der Ball am Roboter vorbei fliegt, bewegt der Roboter ein am Armende montiertes Netz dorthin und fängt den Ball damit auf. Das Resultat haben wir im nachfolgenden Video zusammengefasst:
A multi-link-flexible robot arm catching thrown softballs.
Sofern die Schwingungen regelungstechnisch unterdrückt und Abweichungen aufgrund statischer Verbiegungen kompensiert werden können, ließen sich in manchen Anwendungen diese elastischen Eigenschaften vielleicht nicht mehr nur als Problem verstehen. Vielmehr könnten elastische Eigenschaften vielleicht auch ausgenutzt werden, um beispielsweise Kontaktsituationen zu erkennen und darauf zu reagieren. Mit aktiv geregelten moderat gelenkelastischen Roboterarmen wurde dies ja bereits eindrucksvoll gezeigt.
Bezüglich gliedelastischer Roboter ist die Dämpfung auftretender Schwingungen bislang noch das dominierende Thema in Publikationen.
In den vergangenen Tagen konnten wir hier womöglich einen ersten Schritt über die reine Schwingungsdämpfung hinaus machen. Basierend auf einer Kraftregelung ist es uns gelungen ein Regelungskonzept zu entwickeln, bei dem wir die Schwingungen der mechanischen Struktur eines Roboterarms unterdrücken und zugleich die Nachgiebigkeit aktiv beeinflussen können. Einige Experimente dazu haben wir in nachfolgendem Video festgehalten:
Video zur Kraftregelung eines gliedelastischen Roboterarms
In dem Regelungskonzept wird die Information über die auf die Robterarme einwirkenden Kräfte mittels Dehnungsmessstreifen erfasst und individuell auf die Antriebsregler zurückgeführt. Auf diese Weise werden Schwingungen in der Armstruktur unterdrückt obgleich sie von der Gelenkbewegung oder der Interaktion mit der Umgebung herrühren. Zusätzlich lässt sich die Nachgiebigkeit des Roboterarms derart beeinflussen, dass wir mit sehr wenig Kraft den Roboterarm aus seiner aktuellen Position schieben können und die Wahrscheinlichkeit fragile Objekte bei einer unvorhergesehnen Kollision zu zerbrechen deutlich reduziert wird.
Also: elastische Roboterarmkörper – Fluch oder Segen? Trotz dieser Experimente sind noch zahlreiche Herausforderungen zu meistern und fragen zu beantworten. Dennoch scheint es mir, als schlummertem in den Elastizitäten der Armkörper nicht nur Probleme, sondern auch Potenziale.
Ich freue mich darauf zu sehen, wo die Reise noch hinführen wird.
Die Robotik-Softwareschmiede Willow Garage feiert das Fünfjährige ihres open-source Robot Operating System (ROS) mit diesem coolen Artikel und diesem coolen Video:
https://youtube.com/watch?v=zV48Pq0muEkROS: Five Years
Der Artikel zeigt beeindruckend, welche Verbreitung ROS in den letzten fünf Jahren in der wissenschaftlichen Robotiklandschaft erhalten hat, zum Beispiel die Anzahl der offiziell unterstützten Roboter (beeindruckende achtundzwanzig), womit es unter den sonst in der Robotik häufigen Einzellösungen positiv hervorsticht.
Und das alles frei verfügbar unter der BSD-Lizenz!
Glückwunsch! Und alles Gute für die nächsten fünf Jahre.
Nebenan bei Robonews schrieb man vorgestern über Roboter im “echten Leben” – Roboter in Fukushima und versucht, Beispiele für Roboter im „echten Leben“, also für den Einsatz in realer Umgebung, zu geben. Die Idee ist gut, aber die genannten Beispiele können die Überschrift gerade nicht stützen. Ich hatte begonnen, einen Kommentar zu dem Blogartikel zu schreiben. Der Kommentar wurde aber immer länger und ausführlicher, weswegen ich ihn jetzt hier aufschreibe.
Industrieroboter, die dort als Beispiel genannt werden, funktionieren nämlich in der Regel für eine einzelne Aufgabe, in streng strukturierter, abgesperrter und unveränderlicher Umgebung. Und die Bilder des Roboters, der womöglich in Fukushima zum Einsatz kommen soll, sind wohl nicht umsonst alle in einer Halle mit künstlich gebauten und vorher bekannten Hindernissen entstanden.
Wie wenig das mit der echten, harten Realität zu tun hat, deutet sich bei Betrachtung der Reaktionen auf Fukushima an: über Wochen ist dort nämlich zum Erstaunen der breiten Öffentlichkeit kein Roboter zum Einsatz gekommen. Bis die Japaner einen Monat nach dem Unglück mit dem geliehenen amerikanischen Militärroboter PackBotimmerhin ein paar Messungen von innerhalb der Reaktorgebäude bekommen konnten. (Ein Umstand, der einen gehörigen Einfluss auf die öffentliche Wahrnehmung der japanischen Robotik in der eigenen Bevölkerung hatte)
Bilder von PackBot aus dem Innern von Fukushima
Roboter im echten Leben müssen nämlich nicht nur mit ein paar Holztreppen in gut ausgeleuchteter Umgebung zurechtkommen, wie es die Bilder im oben genannten Artikel zeigen, sondern die Realität ist viel brutaler: Plötzlich ist überall Schutt und Wasser, die Temperaturen liegen weit jenseits üblicher Werte, so dass jegliche Standardelektronik versagt. Sensoren versagen, da alles dunkel, nass und dreckig ist. Der Funkkontakt zum Roboter bricht aufgrund der radioaktiven Strahlung ab, usw. …
Dass Roboter außerhalb ihrer Laborumgebung zurechtkommen, müssen sie auch an echten Problemen zeigen, wenn diese auftreten. Hübsche Bilder von Robotern auf Holztreppen Monate nach einer Katastrophe zu zeigen, oder zwei Jahre nach dem Auftreten des Problems einen Roboter dafür konstruiert zu haben, ist kein guter Hinweis für die Einsatzfähigkeit und Robustheit, die für den Einsatz in der Realität außerhalb von Laboren notwendig ist.
Das Problem ist auf ungefähr allen Ebenen unglaublich schwierig. Und gerade deshalb muss man mit Aussagen vorsichtig umgehen, dieses Problem habe man im Griff.
Die International Conference on Robotics and Automation (ICRA) 2012 hat begonnen. Wie jedes Jahr trifft sich hier eine vierstellige Anzahl Robotik-Wissenschaftler der ganzen Welt, um aktuelle Forschung vorzustellen und zu diskutieren.
Und den kleinen Kumpel oben im Bild bekommen haben ich sowie alle Gäste der ICRA in diesem Jahr zur Begrüßung geschenkt bekommen. Wie geschaffen für ein Robotik-Blog mit dem Namen „botzeit“ …
Um der Konferenz zu folgen, empfehle ich wie immer Planet Robotics, sowie für den Livestream die Twitter-Hashtags #ICRA und #ICRA12.
Im April 2010 wurde der Bionische Handling-Assistent (BHA) von Festo auf der Hannover Messe der Öffentlichkeit vorgestellt. In den folgenden Monaten sah dieser biologisch inspirierte Roboterarm zu recht eine große Medienpräsenz und wurde mit zahlreichen Preisen, unter anderem dem Deutschen Forschungspreis 2010, ausgezeichnet. Im Februar 2011 bekamen wir dann unseren eigenen BHA, voller Vorfreude, denn wir wussten, dass niemand bislang mit dem BHA tun konnte, was wir mit ihm vorhatten: ihn zu kontrollieren.3
Die Struktur und Funktionsweise des BHA ist inspiriert von einem Elefantenrüssel, wie in folgender Abbildung unschwer zu erkennen ist. Der Arm wird im Sinne des Rapid Prototypings im 3D-Drucker gedruckt. Als Material wird Polyamid verwendet, wodurch der gesamte Arm leicht-gewichtig und durchgängig verformbar wird: Im Wesentlichen besteht der BHA also aus Plastik und einer Menge Luft. Bewegt wird der Arm von dreizehn pneumatischen Ventilen, die die dreizehn Kammern des Roboters mit Luft füllen oder entleeren. Dies wiederum verbiegt, beugt und streckt die komplette Struktur.
Von einem Elefantenrüssel inspiriert
Festo hat mit dem BHA die Vision eines leichten, freibeweglichen Dritte-Hand-Systems, das den Menschen bei seiner Arbeit unterstützen kann. Dank seiner strukturellen Nachgiebigkeit (Compliance) ist der Arm im Kontakt mit Menschen und seiner Umgebung naturgemäß sicher, was die Möglichkeiten von direkter Zusammenarbeit von Mensch und Roboter eröffnet. In industriellem Kontext kann der BHA in Fertigungsprozessen eingesetzt werden, z.B. um mit empfindlichen Gütern wie z.B. Lebensmitteln zu arbeiten.
Als wir uns entschlossen haben, Festos Bionischen Handling-Assistenten zu erwerben, wussten wir, dass wenige der klassischen und bekannten Verfahren mit diesem Roboter funktionieren würden. Trotzdem war überraschend, dass der Roboter ohne jegliche Software ausgeliefert wurde.
Keine Software.
Nichts.
Noch bis vor einem Jahr konnten wir mit dem BHA nicht viel mehr tun, als von Hand die pneumatischen Ventile zu öffnen und zu schließen, um damit entweder vollen Druck oder gar keinen Druck in die Kammern zu geben. Auch damit waren die Bewegungen des Roboters absolut faszinierend und wir hatten großen Spaß, aber ernsthafte Anwendungen waren damit natürlich noch nicht möglich. Wie von Festo zugesagt, bekamen wir dann vor fast genau einem Jahr elektronische Ventile, mit denen wir (mehr oder weniger präzise) den Druck in den Kammern automatisch vorgeben konnten. Nicht mehr und nicht weniger: den Druck kontrollieren.
Um es einmal vorsichtig zu sagen: Der Schritt von dieser Druckregelung zu einer ernsthaften Anwendung mit dem BHA ist groß!
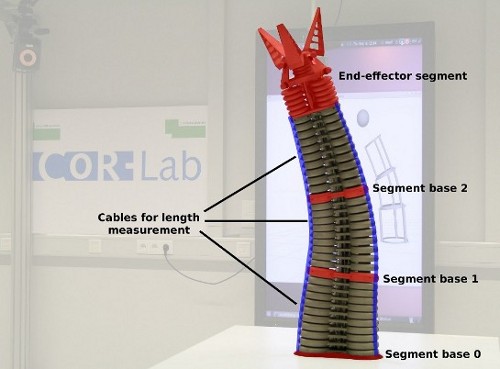
Das tatsächliche Werkzeug, dass man mit dem BHA kontrollieren will, ist der sogenannte Fin Gripper am Ende des Arms. Diesen Greifer zu allerdings genau zu positionieren setzt zuallererst voraus, die Postur des Arms präzise bestimmen zu können. Den Druck in den einzelnen Kammern zu kennen, reicht dafür bei weitem nicht aus; dass dies zum Scheitern verurteilt sein würde, diese Erfahrung hatten wir bereits mir anderen Robotikplattformen gemacht: Zehn Mal den gleichen Druck auf einen pneumatischen Roboter zu geben, ergibt im Regelfall zehn verschiedene Posturen des Roboters. Reibung, Reibung, Hysterese-Effekte und Nicht-Stationaritäten verändern das Ergebnis von Mal zu Mal.
Die kinematische Struktur des BHA
Um diesen Problemen zu begegnen, besitzt der BHA Längensensoren (Kabel-Potentiometer), um an der Außenseite des Arms die Streckung der einzelnen Kammern zu messen (siehe obige Abbildung). Natürlich wollten wir diese Länge nicht nur kennen, sondern auch kontrollieren können. Das ist theoretisch mit klassischer (PID-)Regeltechnik möglich, aber funktioniert auf diese Weise nur sehr schlecht. Um dieses Verhalten zu verbessern, könnte man nun versuchen, all das Wissen über den BHA in eine ausgefeiltere Regelungstechnik zu stecken. Wenn man dieses Wissen bloß hätte …
Eine kurze Liste von Dingen, die man über den BHA nicht weiß:
Das präzise Verhältnis zwischen Druck in den Kammern und der geometrischen Postur im Ruhepunkt (im Equilibrium)
Jegliche Art von Dynamik (nicht nur der Pneumatik selbst, sondern auch des sehr viel langsameren Zusammenspiels zwischen der Pneumatik und Geometrie)
Welche Länge des Arms bzw. der einzelnen Kammern ist überhaupt möglich? Wo liegen die Grenzen?
Und nicht zuletzt: Wie genau ist das Zusammenspiel der obigen Aspekte zwischen den einzelnen Kammern. Denn: Es besteht ein starker Zusammenhang!
Alles zusammen eine große Herausforderung … aber nicht unmöglich. Angenommen also, die Länge des Aktuators lässt sich messen und kontrollieren. Um nun die Endeffektor-Position (die Position des Greifers) zu kontrollieren … muss man die aktuelle Endeffektor-Position kennen!
Die Endeffektor-Position anhand der Geometrie des Roboters und der Stellung der Aktuatoren zu errechnen, nennt sich Vorwärts-Kinematik und ist für handelsübliche Roboter kein großes Problem, sondern einfache Trigonometrie. Der BHA gehört allerdings zu einer anderen Klasse von Morphologien, genannt Continuum Kinematics (also in etwa: kontinuierliche Kinematik). Dank seiner mechanischen Flexibilität besitzt dieser Roboterarm unendlich viele Freiheitsgrade, da jeder Bereich des Roboters unterschiedlich gebogen und gestreckt sein kann. Unendlich viele Freiheitsgrade können weder mit Sensoren gemessen noch berechnet werden.
Als wir unsere Arbeit mit dem BHA begonnen haben, planten wir nicht, die komplizierte Kinematik des BHA zu simulieren. Da wir uns im Kontext des BHA hauptsächlich mit Maschinellem Lernen beschäftigen, wollten wir die Endeffektor-Position schlicht messen, um sie benutzen zu können (tun wir auch). Dass wir trotzdem eine Simulation benötigen würden, stellte sich heraus, als wir Schwierigkeiten in der Visualisierung bekamen. Wir wollten nämlich darstellen, wie die räumlichen Koordinaten mit den Bewegungen des BHA zusammenhängen.
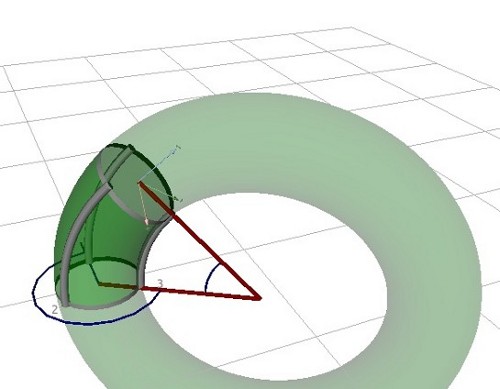
Da Visualisierung Kenntnis der Kinematik voraussetzt, begannen wir, sie anzunähern. Selbst wenn sich die Beugung und Streckung von unendlich vielen Freiheitsgraden nicht berechnen lässt, so lassen sich doch durch die Längensensoren einige Annahmen zur Beugung des Arms treffen. Die einfachste Art der Beugung ist eine kreisförmige; im drei-dimensionalen Fall entspricht dies einem Torus:
Torus-Modell zur Annäherung der Beugung des BHA
Das Bild zeigt, wie sich ein Segment mit drei Aktuatoren (in der Abbildung als graue Röhren dargestellt) entlang eines Torus verbiegt. Diese Geometrie kann mit drei Parametern beschrieben werden: zwei Winkel (in der Abbildung blau dargestellt) und der Radius des Torus (in der Abbildung rot). Diese drei Parameter können anhand der gemessenen Längen an der Außenseite der BHA-Segmente rekonstruiert werden. Sobald diese Parameter bestimmt sind, ist das Berechnen der Vorwärtskinematik und damit die Bestimmung der Endeffektor-Position (also der Position des Greifers) einfach. Ein Problem tritt lediglich im Grenzfall auf, wenn alle Längen gleich sind, wenn also alle Kammern gleich gestreckt sind. Diese Verformung kann durch einen Torus nicht dargestellt werden, obwohl der BHA zu solch einer Bewegung in der Lage ist. Auch für dieses Problem ließ sich allerdings eine einfache, numerisch stabile Lösung finden. Der BHA lässt sich somit durch Aufeinandersetzen dreier solcher Segmente darstellen und simulieren.
Die gezeigten Torusdeformationen sind sehr einfache Annäherungen des Arms im Vergleich zu komplexen Physik des Verformungs-Problems. Üblicherweise ist diese Art von Annäherung daher nicht hinreichend für diese Art von Robotern (siehe z.B. Trivedi 2008 4 ). Nicht jedoch für den BHA: Hier funktioniert die beschriebene Lösung sehr gut, in unseren Tests sehen wir einen durchschnittlichen Fehler von 1cm auf einer Länge von 1m. Nicht perfekt, aber absolut ausreichend für unsere Zwecke und außerdem durchaus konkurrenzfähig zu Lösungen in der Literatur.
Das folgende Video zeigt das simulierte Modell und unseren BHA:
BHA-Simulation
Der große Vorteil des benutzten einfachen Torus-Modells ist seine Geschwindigkeit in der Berechnung. Unsere Software-Bibliothek ist auf Basis dieses Modells in der Lage, die Vorwärtskinematik des BHA auf einem einzelnen CPU-Kern mehrere zehntausend Mal in der Sekunde zu berechnen. Auch wenn wir diese Simulation ursprünglich nicht geplant hatten, ist sie damit mittlerweile eine essentielles Werkzeug bei unserer Arbeit mit dem BHA geworden. Die interessanten Dinge machen wir weiterhin auch auf der echten Hardware, aber parallel lassen sich nun viele Dinge bequem vorberechnen und darstellen.
Die Kinematik-Simulation ist in C++ implementiert und als Open-Source-Bibliothek verfügbar. Über die folgende Seite kann sie heruntergeladen werden und enthält sowohl die Vorwärtskinematik als auch die gezeigte OpenGL-basierte 3D-Visualisierung: http://www.cor-lab.de/software-continuum-kinematics-simulation Wir freuen uns über Benutzer und Erfahrungsberichte.
Der folgende einfache Code-Schnipsel berechnet zum Beispiel die Vorwärtskinematik des BHA:
// create robot morphology with segment radii 0.1, 0.09 and 0.08 meters ContinuumRobotKinematics kinematics(RealVector(0.1, 0.09, 0.08)); // specify an end effector offset kinematics.setEndEffectorOffset(RealVector(0.0, 0.0, 0.14)); // this is the forward kinematics function: Mapping<RealVector,RealVector> fwdKin = kinematics.getForwardPositionKinematics(); // try out some posture (a combination of actuator lengths) RealVector posture = {0.2,0.24,0.24,0.2,0.24,0.24,0.2,0.24,0.24}; // this is the resulting end-effector position RealVector position = fwdKin(posture); // [-0.3808, 0, 0.686287]Neben der in diesem Artikel beschriebenen Kinematik-Berechnung und Simulation des BHA, haben wir in den letzten Monaten noch viele weitere spannende Dinge mit dem BHA gemacht, die wir auf der Automatica-Messe im Mai in München zeigen werden: Um zu sehen wie wir trotz der zahlreichen obigen Probleme mithilfe maschineller Lernmethoden den Greifer auf dem echten BHA im Arbeitsraum zu kontrollieren gelernt haben, lohnt sich also ein Besuch unseres Standes auf der Automatica in München: Stand 427 und 429 in Halle B3, vom 22. bis 25. Mai.