Seit heute steht fest: Der Spitzencluster 1 „Intelligente Technische Systeme“ aus Ostwestfalen-Lippe hat den Spitzencluster-Wettbewerb gewonnen und damit einen Spitzencluster zur Robotik und Automatisierung gewinnen lassen.
Spitzencluster „it`s owl“
Dazu werden über die nächsten Jahre 40 Millionen Euro für 45 Forschungsprojekte in den Spitzencluster fließen, um einen „Innovationssprung von der Mechanik zu Intelligenten Technischen Systemen“ zu machen.
Die Liste der Partner in dem Spitzencluster liest sich durchaus stattlich und mit der Universität Bielefeld, dem CoR-Lab und dem CITEC, ist die Robotik stark vertreten. Die Themen Mensch-Maschine-Interaktion und Intelligente Sensorenim Projektplan sind dann auch klassische Themen der Robotikforschung.
Ich freu mich! Auf die Projekte, die da kommen werden.
Disclaimer: Ich studiere an der Universität Bielefeld und arbeite für das CoR-Lab.
Wie angekündigt findet auch in diesem Monat am letzten Donnerstag, also in der kommenden Woche am 26. Mai, ein Treffen des frisch gegründeten Robotik-Stammtisches statt. Dieses Mal werden wir uns im Ruhrgebiet im schönen Dortmund treffen. Als Lokalität haben wir das BAM Boomerang in Bahnhofsnähe ausgewählt, in dem für uns ausreichend Platz reserviert sein wird.
Wir freuen uns darauf, an die gesellige Atmosphäre des letzten Stammtisches und an die zahlreichen fachlichen und auch weniger fachlichen Gespräche anknüpfen zu können. Dieses Mal hoffentlich auch wieder mit einigen neuen Gesichtern aus NRW, dem Ruhrgebiet und Umgebung. Ein gutes Mittel dafür ist Mund-zu-Mund-Propaganda, deswegen bitte Ort und Termin fleißig an Robotik-Interessierte weiterleiten.
Mehr zum nächsten Stammtisch, inklusive Karte, gibt`s wie gehabt auf der Stammtisch-Seite (jetzt auch rechts in der Seitenleiste zu finden). Bitte nach Möglichkeit auch wieder ins Doodle eintragen.
Letzte Woche Donnerstag, am 28. April, traf sich eine mutige Gruppe Robotik-Interessierter aus NRW zur Gründung des Robotik-Stammtisches NRW. Insgesamt ein gutes Dutzent Teilnehmer aus Bielefeld und dem Ruhrgebiet besprachen sich gut speisend und trinkend sowohl fachfremd als auch zum Hauptthema des Stammtisches, wie die unten abgebildete Servietten-Skizze beweist (Thema war maschinelles Lernen in gemeinsamer Diskussion zwischen Dortmundern und Bielefeldern).
Anlass für erste vage Projektabsichten gab das mitgebrachte Maskottchen des ersten Treffens, ein RP6 (rechts im Bild), der möglicherweise bald mit Anbindung an ein Android-Phone aufgerüstet wird. Wissenschaftliche Kontakte wurden auch bereits erfolgreich geknüpft.
Insgesamt zeigten sich alle Anwesenden, mit denen ich gesprochen habe, sehr zufrieden mit dem ersten Treffen und haben sich einstimmig dafür ausgesprochen, das Treffen regelmäßigzu wiederholen. Und auch der einmonatige Rhythmus soll fürs Erste beibehalten werden, vorgesehen ist ab sofort der letzte Donnerstag jeden Monats. Das nächste Treffen ist auch schon geplant und wird am 26. Mai im Ruhrgebiet, in Dortmund stattfinden, um mehr Teilnehmer aus dem Ruhrgebiet und vielleicht sogar von außerhalb anzulocken. Die genaue Lokalität (natürlich zwecks bequemer An- und Abreise wieder in Bahnhofsnähe) wird noch verkündet. Hier werden wie immer Informationen zum nächsten Treffen zu finden sein und dort im Doodle kann man sich schon eintragen.
Servietten-Mathematik beim Stammtisch
Ich freue mich schon auf das nächste Treffen und hoffe auch neue Teilnehmer zu sehen. Wie gehabt bitte ich alle Leser, dies an alle Robotik-Interessierte der Region weiterzugeben.
Ungefährt zwei Jahr ist die Idee nun schon alt und endlich – verzögert durch Ortswechsel und allerhand anderer Gründe, die derlei Dinge gerne verzögern – ist die Umsetzung abzusehen: Die Gründung einer Robotik-Gruppe oder, wie wir es nun nennen, eines Robotik-Stammtisches.
Es gibt einige Robotik-Enthusiasten, die so wie zwei Autoren dieses Blogs, Arne und Jörn, verrückt genug sind, sich nicht nur während der Arbeitszeit mit Robotern beschäftigen zu wollen, sondern die sich auch in der Freizeit mit Robotik beschäftigen und nach Möglichkeit mit Robotern herumbasteln wollen. Alleine macht dies allerdings sehr viel weniger Spaß als gemeinsam und ist überdies im regen Erfahrungs- und Ideenaustausch sehr viel spannender und produktiver. Begünstigt durch die dichte Hochschullandschaft beschäftigen sich zahlreiche Studierende sowie Doktoranden mit den vielfältigen und spannenden Themen der Robotik. Etwas schade ist, dass trotz dieser räumlichen Nähe Bekanntschaften mitunter nur auf Konferenzen entstehen und bisweilen verebben.
Mit dem Ziel also, Robotik-Enthusiasten und -Interessierte zusammenzubringen, gegenseitig Wissen auszutauschen, gemeinsam Ideen zu entwickeln oder einfach nur in entspannter Atmosphäre mit Gleichgesinnten bei einem Bierchen oder anderem Getränk über Robotik zu plaudern, findet am 28.04.2011 in Bielefeld die Gründung des Robotik-Stammtisches NRW statt.
Wer auch immer interessiert ist, ob aus NRW, ganz Deutschland oder weltweit, ist herzlich eingeladen, an dem Treffen teilzunehmen und diese Einladung an andere Robotik-Interessierte weiterzugeben. Als Lokalität für den ersten Stammtisch haben wir Bielefeld und dort zugunsten der einfachen An- und Abreise das New Orleans in unmittelbarer Bahnhofs-Nähe gewählt. Der Stammtisch startet um 19:00 Uhr.
Geplant ist es, den Stammtisch im monatlichen Rhythmus zu etablieren und, da es sich um den Robotik-Stammtisch NRW mit Gründungsmitgliedern aus dem Raum Bielefeld und Dortmund handelt, den Ort des Treffens regelmäßig zwischen Bielefeld und dem Ruhrgebiet wechseln zu lassen. Aktuelle Informationen zu Ort und Termin dieses und zukünftiger Stammtischtreffen finden sich zukünftig hier auf dieser Seite: Robotik-Stammtisch NRW
Wenn Du am Stammtisch teilnehmen möchtest, dann trag Dich nach Möglichkeit bis zum 26.04.11 im Stammtisch- Doodle ein, damit wir einen ungefähren Eindruck zur Anzahl der Teilnehmer gewinnen.
Zugegeben, für einen „Frohes neues Jahr“ und „Das war die Robotik 2010“-Blogeintrag ist es schon etwas zu spät. Aber ich dachte, ich sehe trotzdem mal durch die hiesigen Blogeinträge des vergangenen Jahres und überlege, was in der Robotik im vergangenen Jahr besonders erwähnenswert war.
Im Januar begann das Jahr mit einem großen Wurf der californischen Robotikschmiede Willow Garage, die die Version 1.0 ihres Open-Source-Betriebssystems für Roboter ROSveröffentlichte. ROS ist mittlerweile in der Robotik-Szene voll angekommen und viele Institute machen sich mittlerweile die Tatsache zunutze, dass sie mit ROS ein offenes System mit einer Vielzahl gut gewarteter State-of-the-Art -Standardkomponenten erhalten und sich mehr auf die Integration, sondern vielmehr auf konkrete Forschungsfragen konzentrieren können. Im gleichen Monat beschloss das Jet Propulsion Laboratory der NASA, dass der Mars-Rover Spirit erst einmal nicht weiterkommt und deshalb winterfest gemacht werden soll.
Im Februar hat mich vor allem eine realistische Hand-Prothese namens BeBionic beeindruckt, die in Videos fast menschlich aussieht. Im März habe ich meine Stelle am CoR-Lab angetreten und im April zeigte Willow Garage mit dem Wäsche-faltenen Roboter ein ersten von mehreren Videos, in denen Roboter PR2 in mal mehr und mal weniger sinnvollen Anwendungen zu sehen ist. Im Mai traute die Roboter-Lady iFairy ein japanisches Paar und im Juni haben sich auf der spannenden Automatica-Messe neben der Industrie auch die Robotik-Institute dieses Landes vorgestellt.
Im Juli hatte ich das Vergnügen, auf der Summerschool über mehrere Tage den iCub live und aktiv kennenzulernen, dessen neue Beine ich später auch noch vorgestellt habe.
Der August zeigte uns den unheimlichen Telenoid R1 und im November und Dezember hat zum Jahresende die Ingenieurskunst noch einmal gezeigt, was sich mit cleveren Ideen bauen lässt: sowohl der Universal Jamming Gripper mit Kaffeepulver als auch der zu Recht mit dem Zukunftspreis ausgezeichnete Rüssel von Festo bestachen durch ihr einfaches aber brillantes Konzept. (Hört sich irgendwie nach einem Satz aus einem Prospekt an, ist aber ernst gemeint) Und über das, was Microsoft Kinect seit Dezember mit der Robotiklandschaft anstellt, werde ich hofffentlich auch bald schreiben. Der Blogeintrag fliegt hier schon halb geschrieben herum, bis ich damit fertig bin, müssen aber ein paar Videos ausreichen, die ich hier immer mal wieder einstelle.
Insgesamt haben wir in 2010 eine Robotik-Landschaft gesehen, die immernoch viel experimentiert und zum Teil verrückten, neuen Ideen nachgeht. Gleichzeitig lässt sich aber auch beobachten, dass die Robotik auch abseits der typischen Industrierobotik beginnt, ernsthafte Lösungen für Probleme zu präsentieren, die bisher nicht lösbar waren und zum Teil nicht einmal ernsthaft lösbar schienen. Einige Themen und Blogbeiträge sind 2010 bei mir leider aus Zeitmangel unbeschrieben liegengeblieben. Aber es kommen immer weiter neue Themen und 2011 geht es sicher ebenso spannend weiter wie 2010 aufgehört hat.
Zu Recht reißt die Robotik den diesjährigen Zukunftspreis an sich: Festo, die in der Vergangenheit schon durch mit beeindruckenden bionischen Experimenten von sich reden machten, wurden gestern am 1. Dezember zusammen mit dem Fraunhofer Institut für Produktionstechnik mit dem Deutschen Zukunftspreis 2010 ausgezeichnet. Ausgezeichnet wurden sie für den folgenden Roboterarm:
Der Elefantenrüssel von Festo
Wie schon der Kaffeegreifer besticht diese Entwicklung durch ihr im Kern einfaches Prinzip: Der Arm besteht aus drei Segmenten, die jeweils aus drei Ziehharmonika-förmigen Kunstoff-Hohlkammern bestehen. Jede dieser Kammern wird durch Einpumpen von Luft verlängert und durch Absaugen der Luft verkürzt, wodurch sich der Arm wild verbiegen lässt. Kombiniert mit einem cleveren Greifer, dem Fingripper, der sich um den Gegenstand schließt, den er greift, gibt das eine spannende, neue Robotik-Plattform für den Fertigungseinsatz. Denn wie in der Laudatio richtig gesagt, erlaubt der Roboterarm durch seine weichen, nachgiebigen Strukturen auch eine sichere Zusammenarbeit mit dem Menschen, die in Zukunftsvisionen von industrieller Fertigung eine große Rolle spielt, mit konventionellen schweren Industrierobotern aber nicht denkbar ist. Und auch in der Servicerobotik wird der Bionische Handling-Assistent sicher in Betracht gezogen werden.
Abseits von dem wirklich gut gemachten Werbevideo oben, muss sich nun zeigen, wie gut der Arm beherrschbar ist und sich einsetzen lässt. Die viel beschworene Feinmotorik des Arms – dass er durch seine weiche Struktur und den feinfühligen Greifer auch mit empfindlichen Objekten umgehen kann – setzt nämlich auch voraus, dass man ihn zumindest einigermaßen clever zu den Objekten hinbewegen kann. Und seine ganze Stärke spielt der Arm ohnehin erst aus, wenn auch alle Freiheitsgrade ausgenutzt werden können, um sich wie ein Elefantenrüssel schlängeln und winden zu können, was das Video grob demonstriert, aber noch nicht im wirklichen Einsatz zeigt.
Die Herstellung des Arms ist übrigens auch innovativ: Arm und Greifer kommen nahezu komplett aus einem 3D-Drucker.
Kaffee ist ein großartiges Getränk. Dass man damit auch Gegenstände unterschiedlicher Form und Größe heben kann, war bislang wenig bekannt. Genau das zeigt aber das Ergebnis einer Zusammenarbeit zwischen dem Cornell Computational Synthesis Laboratory der University of Chicago und iRobot: der Universal Jamming Gripper:
Der Universal Jamming Gripper
Eine beeindruckende Palette an Gegenständen, die der Greifer (sofern man ihn so bezeichnen mag) hochhebt. Kaffeepulver, ein Luftballon und eine Vakuumpumpe … so einfach und effektiv kann Technik sein.
Traditionell ist die Interaktion mit Robotern darauf beschränkt, dass dem Roboter Kommandos zugesandt werden (in der Regel als textuelle Kommandos, seltener per Sprache) und der Roboter über geeignete Sensorik (Kameras, Mikrofone, Laserscanner, …) seine Umgebung wahrzunehmen versucht. Was dabei in der Interaktion mit Menschen entsteht, ist allerdings häufig eine holprige, wenig natürliche und dadurch für Menschen oft anstrengende Interaktion. Dass man auf diese Art und Weise auch Menschen mit Robotern interagieren lässt, die nicht an der Entwicklung beteiligt waren und dadurch nicht Verständnis für diese Schwierigkeiten aufbringen, passiert daher eher selten.
Eine Form der Interaktion, die sehr viel natürlicher ist, weil sie durch die physische Rückkopplung sehr viel direkter ist, ist die direkte Berührung und damit das Führen des Roboters. Der Mensch fasst den Roboter an der Hand (sofern er eine solche besitzt) und leitet den Roboter an. In der Robotik ist dies ein relativ aktueller Zweig der sogenannten Mensch-Maschine-Interaktion (MMI, Human Machine Interaction – HMI). Im Umfeld der industriellen Robotik sind ähnliche Techniken unter den Begriffen Teach-In und Kinestethic Teaching zu finden.
Es gibt mehrere Möglichkeiten, einen Roboter für diese Form der Interaktion auszustatten. Eine Möglichkeit ist es, die Hardware des Roboters bewusst so zu konstruieren, etwa durch die Integration von mechanischen Federn in Struktur des Roboters, dass dieser nachgiebig ist. Diese Art der Nachgiebigkeit wird in der Robotik bzw. Regelungstechnik als Passive Nachgiebigkeit (engl.: Passive Compliance) bezeichnet, da sie – einmal verbaut – das System ohne weiteres Zutun dauerhaft nachgiebig gestaltet.
Eine aufwendigere, aber dafür auch flexiblere Möglichkeit ist die Aktive Nachgiebigkeit (engl.: Active Compliance). Hierbei kann die Roboterhardware mechanisch völlig steif sein; die Nachgiebigkeit des Systems wird durch eine entsprechende Ansteuerung der Motoren simuliert. Dafür ist der Roboter mit Kraftsensorik ausgerüstet, die dem System konstant die auf den Roboter einwirkenden externen Kräfte meldet. Eine geschickte Regelung (Wikipedia) lässt den Roboter dann auf diese Kräfte auf die gleiche Art und Weise reagieren, wie es eine reale Feder tun würde: Bei kleiner Krafteinwirkung gibt der Roboter mit einer kleinen Bewegung nach, bei größerer Krafteinwirkung reagiert der Roboter mit einer deutlicheren Ausweichbewegung. Nicht, weil die Motoren nicht kräftig genug wären, den Kräften entgegenzuhalten, sondern weil dieses Verhalten den Eindruck eines weichen, nachgiebigen Systems erweckt und erwecken soll. Wie so eine Interaktion aussehen kann, zeigt das folgende Video:
Der iCub wird geführt und kann Objekte ertasten
Nachgiebigkeit ist dabei allerdings nicht allein für Interaktion eingesetzt; es ist auch ein enormer Sicherheitsaspekt. Ein Roboter, der mit seiner Umgebung (im schlimmsten Fall dem Menschen) kollidiert, weil er sie nicht richtig erkannt hat, richtet potentiell deutlich weniger Schaden an, wenn er nachgiebig ist; Schaden an sich und der Umwelt. Dies gilt für passive Nachgiebigkeit, genauso wie für aktive Nachgiebigkeit, wie das Deutsche Luft- und Raumfahrtzentrum im folgenden Video eindrücklich und mit offenbar ausreichend Vertrauen in die Technik beweist; am Ende des Videos mit Messer und einem menschlichen Probanden:
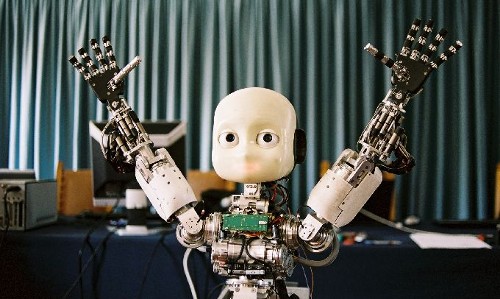
Im nächsten Monat, am 11. November, wird der Film Plug & Pray in die deutschen Kinos kommen. Ich hatte schon vor einigen Wochen das Vergnügen, den Film in trauter Runde während der iCub Summer School zu sehen, von der auch Szenen im Film zu sehen sind (unter anderem mit dem Slogan des Filmes „Dafür werden wir alle exkommuniziert“).
Der iCub im Film „Plug & Pray“
Die Visionen, die heutzutage wegen fortschreitender Technik rund um die künstliche Intelligenz und die Robotik entstehen, sind längst auf dem Level der Science-Fiction des letzten Jahrhunderts angekommen. Auch wenn es technisch an so vielen Stellen noch hapert, sind diese Visionen auch in der Forschung präsent. So wird im Film zum Beispiel Hiroshi Ishiguro gezeigt, der sich einen Roboter nach seinem Abbild geschaffen hat, den Geminoid. Oder der iCub, der einem Kind nachgebildet ist und wie ein Kind lernen und seine Umgebung entdecken soll. Oder Ray Kurzweil, seit Jahren in den USA gefeierter Visionär, der seit einiger Zeit die baldige Verschmelzung von Mensch und Maschine und das menschgemachte Vorantreiben der Evolution predigt.
Plug & Pray ist ein Dokumentarfilm und stellt aktuelle Visionen, Überzeugungen und den Alltag von Forschungsinstituten und Wissenschaftlern weltweit vor, die sich mit künstlicher Intelligenz und Robotik beschäftigen. Durch die schonungslose und gut recherchierte Darstellung der Szene und den zum Teil von den Wissenschaftlern leichtfertig vorgetragenen Fantasien ist der Film durchaus provokant und vielleicht sogar verängstigend. Er nimmt dabei allerdings seine dargestellten Protagonisten ernst, bleibt menschlich und liebevoll, ist niemals reißerisch und lässt Platz zum Nachdenken.
Anstrengend wird der Film dadurch nicht, dass er nie wirklich technisch wird und vor allem durch den wunderbaren, mittlerweile leider verstorbenen Joseph Weizenbaum, einem der Computerwissenschaftler des letzten Jahrhunderts, der mit Humor und scharfem Verstand den roten Faden des Filmes bildet. Immer wieder sind Interviewschnipsel und Alltagsszenen mit ihm eingestreut, die die zum Teil verstörenden Szenen einordnen und in der normalen Welt erden. Dass dies ausgerechnet einem Computerwissenschaftler gelingt, der mit ELIZA (Wikipedia) einen der Meilensteine der künstlichen Intelligenz geschaffen hat, ist erstaunlich und beruhigend zugleich.
Gut recherchiert, nachdenklich, humorvoll und mit durchdachter Einordnung der gesellschaftlichen Relevanz ist Plug & Pray ein Film für Menschen vom Fach, Technik-Interessierte und jeden, den ein Zweig unserer Zukunft interessiert, der gerade rasant entsteht und der immer noch ziemlich unberechenbar ist.
Trailer zum Film „Plug & Pray“
Anschauen dringend empfohlen.
PLUG & PRAY ist erschütternd und packend. Joseph Weizenbaum, mit der Gabe des Humors ausgestattet, verkörpert den gesunden Menschenverstand, während um ihn herum der Wahnsinn geadelt wird.“
Heute geht’s nach Berlin zur Abschlussveranstaltung des EU-Projekts PiSA. PiSA ist ein IP-Projekt (Integrated Project) der EU, also eines der größeren Projekte mit vielen internationalen Partnern. Das Projekt beschäftigt(e) sich mit flexiblen Fertigungssystemen mit Mensch-Maschine-Interaktion. Dieses Projekt ist thematisch so nah an dem Szenario FlexIRob, an dem ich in den letzten Wochen mitgearbeitet habe, dass sich hier ein Blick über den Tellerrand sicher lohnt.
Beim PiSA-Projekt geht es darum, Fertigung so zu gestalten, dass der Mensch weiterhin Teil dieses Prozesses bleibt, aber durch Maschinen und Robotik leistungsfähige Werkzeuge und Hilfen zur Verfügung hat. Die direkte Zusammenarbeit von Mensch und Maschine, von der man zu recht großes erwartet, steckt im Moment allerdings noch in den Kinderschuhen. Allein sicherheitstechnisch und rechtlich sind noch unheimlich viele Fragen offen. Einen Menschen in der direkten Umgebung eines tonnenschweren Industrieroboters arbeiten zu lassen, geschweige denn ihn mit dem Roboter in direkten physischen Kontakt kommen zu lassen, ist ein schwieriges Feld wenn nicht nur vorgegebene Aufgaben abgespult werden sollen, sondern eine flexible Zusammenarbeit gewollt ist.
Ich bin gespannt, welche Lösungen und Ideen im Rahmen des Projekts entwickelt wurden und morgen vorgestellt werden. Die Liste der Projektpartner mit unter Anderem Volkswagen, den Fraunhofer-Instituten für Produktionsanlagen und Konstruktionstechnik (IPK) sowie für Produktionstechnik und Automatisierung (IPA), EADS, COMAU und weiteren ist auf jeden Fall mit großen Namen besetzt.
Ich hoffe, zu sehen, ob innerhalb des Projekts ähnliche Fragestellungen aufgekommen sind wie bei uns und welche Ideen und Lösungen von den Partnern gezeigt werden. Ich freue mich schon auf die Gespräche und Kontakte, die sich hoffentlich ergeben. Zumindest das Social Event, die abendliche Fahrt über die Spree, sollte dazu eigentlich ausreichend Gelegenheit bieten.