Gestern gab es einen Paukenschlag in der Robotik: Google gab bekannt, man habe sieben Robotikfirmen gekauft und habe vor, in Zukunft in Robotik zu investieren. Mit Meka Robotics and Redwood Robotics zum Beispiel hat man zwei nicht ganz unbekannte Firmen der Robotik gekauft, die sich auf humanoide Roboter und Arme spezialisieren.
Das ist insofern ein Paukenschlag, als die Robotik bislang eigentlich nur in der Industrierobotik, (Nachtrag: der Medizinrobotik) und dem Militär einen wirklich kräftigen Markt hat. Die Servicerobotik ist noch großteils von Forschung, Prototypen und nur vereinzelt kommerziell erfolgreichen Robotern wie dem Roomba, Poolreinigungsrobotern o. Ä. bestimmt.
Dass ein Unternehmen wie Google nun diesen Markt angreift (vorerst nur als moonshot-Projekt, also ein eher visionäres Unterfangen), könnte der Robotik in diesem Bereich gehörigen Schub geben. Mit Googles selbstfahrendem Auto haben sie schließlich schon gezeigt, dass sie auf diesem Feld durchaus zu ernsthaften Entwicklungen willens und in der Lage sind:
Googles selbstfahrendes Auto gibt Gas
Und mit dem initialen Kauf von sieben Robotik-Unternehmen und dem ehemaligen Android-Chef Andy Rubin an der Spitze zeigt Google, dass sie es durchaus ernst meinen.
Ich bin gespannt, was da noch kommt. Ob dies die Robotiklandschaft (also die Servicerobotik, abseits der Industrie- und Militärrobotik) verändern kann/wird?
Der Oncilla ist verpackt und fertig für die Rückreise. Eingepackt in einem wasser- und stoßfesten Koffer, gemütlich in maßgeschneiderter Schamstoffeinfassung.
Gestern habe ich mich mit einem leeren speziellen Transportkoffer auf den Weg nach Lausanne in die Schweiz gemacht, um einen neuen Roboter abzuholen und nach Bielefeld zu bringen. Noch ist der Koffer leer, aber für den Rückweg wird mir das BioRob Lab der EPFL in Lausanne einen nagelneuen Oncilla in den Koffer legen. Gerne geben sie den selbstverständlich nicht her, aber so will es das AMARSi-Projekt. Und ich auch.
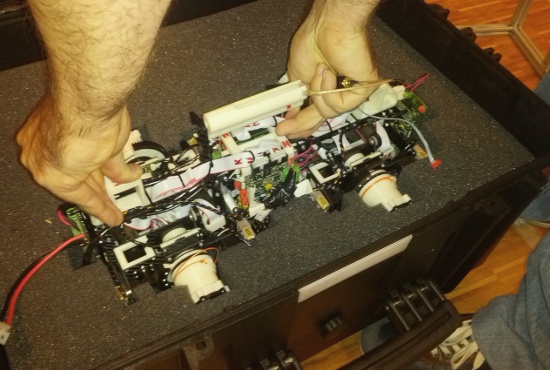
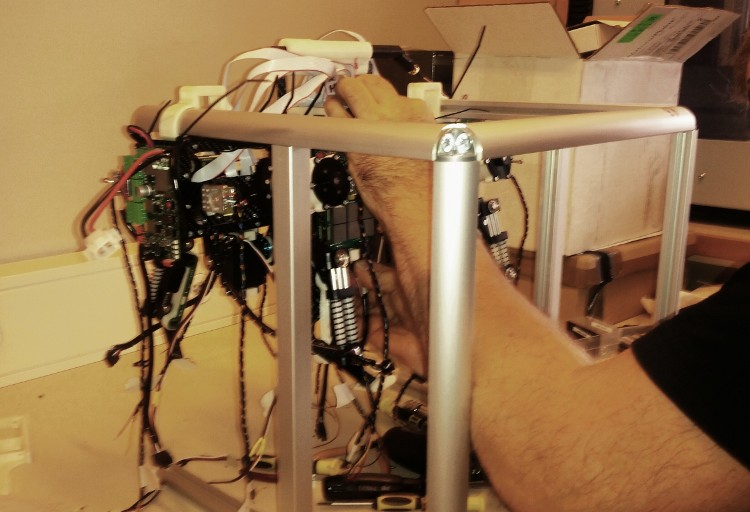
Hier der aktuelle Zustand des Oncilla-Roboters von heut morgen, noch auf dem Ständer und (noch) mit losen Kabelsträngen. Bis morgen ist Peter (im Bild) noch mit der finalen Verkabelung beschäftigt:
Oncilla-Roboter noch auf dem Ständer und mit (noch) losen Kabelsträngen
Hier ist ein Video der ersten Gehversuche (bzw. Trab-Versuche) eines Oncilla-Zwillings, das das Reservoir Lab aus Gent Anfang des Jahres gemacht hat:
Erste Gehversuche mit dem Oncilla (Trab)
Ich hole den Roboter persönlich ab, um gleichzeitig auch eine Einführung in die Hardware zu bekommen. Da ich selbst hauptsächlich mit Software arbeite, bin ich in Hardware-Fragen weitgehend unerfahren und benötige dringend einen Crash-Kurs in Inbetriebnahme und Wartung von Vierbeinern, damit ich unseren Oncilla nicht direkt bei den ersten Experimenten zerlege.
Gleichzeitig werden wir auch die Zeit nutzen, ein bisschen an der Control-Software zu hacken, was direkt vor Ort mit den Oncilla-Erschaffern einfacher ist als über größere Distanz. Ziel ist eine einfache API zu entwickeln, da Software und Hardware des Roboters (inklusive Simulator) in naher Zukunft vollständig Open Source sein sollen.
Am Donnerstag geht’s dann samt Roboter im Gepäck zurück zum CoR-Lab nach Bielefeld, der Spezialkoffer mit den Schaumstoffeinlagen verhindert dabei hoffentlich sämtliche Beschädigungen.
Und dann wartet die eigentliche Arbeit: dem Oncilla neue Tricks beizubringen!
Grundsätzlich wird die strukturelle Elastizität in Roboter-Armkörpern bislang nachteilig gesehen. Sie verlängert Ausregelzeiten und verschlechtert die Positioniergenauigkeit. Allerdings wurde die Realisierbarkeit einer schnellen und genauen Positionierung eines gliedelastichen Roboterarms anhand von Ballfang-Experimenten exemplarisch gezeigt 1. Darüber hinaus kann die intrinsische Nachgiebigkeit jedoch auch vorteilhaft dazu ausgenutzt werden, die tatsächlich effektive Nachgiebigkeit des gesamten Arms aktiv zu beeinflussen. Wie im ersten Teil zu diesem Thema bereits dargestellt, setzt dies eine Kompensation der unerwünschten Effekte durch eine geeignete unterlagerte Regelung voraus. Dabei wurde die Wahrscheinlichkeit, auch zerbrechliche Objekte im Falle einer unvorhergesehenen Kollision zu beschädigen, deutlich gemindert.
Das obenstehende Video geht einen Schritt weiter. Beabsichtigte oder auch unbeabsichtigte Kontakte werden explizit auf Basis eines Modells der gedämpften Armdynamik detektiert und ermöglichen eine entsprechende Reaktion. Das Video stellt das gliedelastische Experimentalsystem TUDOR vor und zeigt insgesamt sieben Experimente zur Schwingungsdämpfung, zur Detektion genau wiederholbarer stumpfer wie auch scharfer Einschläge auf Luftballons sowie zerbrechlicher Christbaumkugeln, weniger exakt wiederholbarer Einschläge auf einen menschlichen Arm und schließlich zur physischen Interaktion mit dem Roboter.
Die Paare von Dehnungs-Messstreifen, die in der Nähe der Gelenke auf jedem nachgiebigen Arm appliziert sind, fungieren als lastseitige Drehmomentsensoren. Unter der Voraussetzung einer hinreichenden Schwingungsdämpfung kann die verbliebene Dynamik des Arms in Analogie zu konventionellen starren Roboterarmen modelliert werden. Diese Vorgehensweise ermöglicht die unmittelbare Anwendung von Verfahren zur Kollisionsdetektion und -reaktion, wie sie zuvor bei gelenkelastischen sowie starren Roboterarmen vorgestellt worden sind 2 .
Die dargestellen Ergebnisse verdeutlichen, dass die strukturelle Elastizität in Roboter-Armkörpern nicht zwingend als nachteilig gesehen werden muss. Vielmehr können sich mit Hilfe entsprechender Regelungsansätze aus der Ausnutzung dieser Eigenschaften neue Möglichkeiten ergeben.
Wer hat sich nicht schon einmal einen Roboter gewünscht, der im Haushalt hilft? Der zum Beispiel schon einmal den Kuchenteig anrührt, knetet und ausrollt, während man selbst die Glasur vorbereitet, bzw. einem das lästige Gemüseschnibbeln beim Kochen abnimmt. Oder einen kleinen Roboterassistenten, der einem bei heimischen Bastelarbeiten die richtigen Werkzeuge anreicht, wie man es aus OP-Sälen in Krankenhäusern kennt: „Roboter, Schraubenzieher!“ – „Schraubenzieher, und weiter?“ – „Schraubenzieher, bitte!“
Die Vision: Roboter und Mensch arbeiten zusammen [johanneswienke.de]
Zumindest in Industrieszenarien ist das keine allzu weit entfernte Zukunftsvision mehr. Flexibel anpassbare Roboter, die autonom oder Hand in Hand mit dem Menschen in einer Werkstatt oder Produktionsstrasse arbeiten und diesen bei Fertigungsaufgaben unterstützen, sind schon seit geraumer Zeit ein strategisches Anliegen europäischer Wissenschaftler und der Robotikindustrie. So führt bereits die im Jahr 2009 ausgerufene europäische Strategic Research Agenda diese beiden Szenarien, den „Robotic Worker“ und den „Robotic Co-Worker“, als Kernanwendungsszenarien zukünftiger Industrierobotik mit auf. Dabei geht es nicht um Großserien-Vollautomatisierung wie man sie z. B. aus der Automobilindustrie kennt, in der Roboter an Roboter aufgereiht in Käfigen und – aus Sicherheitsgründen – abgeschottet vom Menschen monatelang exakt die gleiche Aufgabe ausführen:
Vollautmatisierte Montage von Automobilen bei KIA
Es geht vielmehr um die Unterstützung von Mitarbeitern in kleinen und mittelständischen Unternehmen, deren Auftragslage sich relativ schnell ändern kann. Denkbar ist die Fertigung von Prototypen, von denen häufig nur geringe, einstellige Stückzahlen gefertigt werden. In diesem Kontext sind zur Zeit Handarbeitsplätze immer noch die Regel, d. h. Fachkräfte montieren und bearbeiten Bauteile bzw. bestücken und entladen Maschinen manuell. Häufig sind diese Arbeiten verbunden mit anstrengender körperlicher Arbeit.
Eine Vollautomatisierung im klassischen Sinne, also mit Robotern, die genau auf diesen einen Zweck ausgelegt sind und in aller Regel nicht oder nur sehr aufwendig an neue Fertigungsaufgaben angepasst werden können, macht hier allein schon aus ökonomischen Gründen keinen Sinn. Der durch die Einsparung einer Fachkraft gewonnene finanzielle Vorteil wird sofort wieder zunichte gemacht durch den notwendigen, häufigen und kostenintensiven Einsatz von Experten, die den Roboter bei jeder Änderung im Produktionsablauf wieder an seine neue Aufgabe anpassen und umprogrammieren müssen. Zusätzlich sind viele Teilaufgaben in solchen Fertigungsprozessen sehr komplex und wenn überhaupt nur mit enorm hohem technischen Aufwand automatisch zu bewerkstelligen, wie z. B. der berühmte Griff in die Kiste.
Die Idee ist vielmehr, den Menschen zu unterstützen, indem man ihm diejenigen Arbeiten überlässt, die er z. B. auf Grund besserer visueller Wahrnehmung und guten Fingerfertigkeiten kompetenter und schneller durchführen kann als jede Maschine, ihn aber durch den Roboterassistenten von körperlich belastenden Arbeiten zu befreien … der Roboter als dritte Hand. Damit jedoch beide, Roboter und Mensch, an einem Arbeitsplatz gemeinsam sinnvoll zusammenarbeiten können, sind einige Herausforderungen zu bewältigen. Ein bisschen Buzzword-Bingo:
Flexibilität: Um sich den ständig wechselnden Aufgaben anpassen zu können und in beliebigen (engen, eingeschränkten) Arbeitsräumen mit dem Menschen zusammen zu arbeiten, ist im Vergleich zu herkömmlichen Industrierobotern zusätzliche Flexibilität nötig. Diese erhält man z. B. durch zusätzliche Bewegungsachsen: übliche Industrieroboter verfügen über bis zu sechs Achsen, ab sieben Achsen erhält man durch Redundanz zusätzliche Flexibilität.
Interaktion: Um teures und zeitaufwendiges Umprogrammieren der Roboter durch Experten zu umgehen, muss der Mitarbeiter vor Ort in der Lage sein, durch einfache, direkte Interaktion den Roboter an seine neuen Aufgaben und Arbeitsbedingungen anzupassen und ihn den eigenen Bedürfnissen entsprechend zu programmieren. Sicherheit: Die direkte physische Kooperation zwischen Mensch und Maschine erfordert andere Sicherheitsmechanismen als Zäune und strikte Arbeitsraumtrennung, um die Sicherheit für den Menschen dennoch zu gewährleisten.
Technisch gesehen scheinen obige Herausforderungen so gut wie gelöst. Der vom Deutschen Luft- und Raumfahrtszentrum und KUKA gemeinsam entwickelten Leichtbauroboter IV (LBR IV), dessen serienreifer Nachfolger KUKA LBR iiwa auf der diesjährigen Hannover Messe erstmals vorgestellt wurde, ist ein Beispiel. Das geringe Gewicht, Kraftsensoren zur Kollisionserkennung und eine sehr schnelle Regelung sind gute Voraussetzungen für eine sichere Interaktion mit dem Menschen. Außerdem ist der LBR mit seinen sieben Bewegungsachsen redundant, bietet also genügend Flexibilität, um um Hindernisse herumzugreifen oder Aufgaben auf mehr als nur eine Art zu erledigen.
Dass trotzdem nun nicht jeder sofort einem solchen Roboter Aufgaben beibringen kann, sieht man im folgenden Video, welches im Verlaufe einer umfangreichen Feldstudie 3 mit Mitarbeitern der Firma Harting entstand:
https://youtube.com/watch?v=tRTfSWBbE1QAuch moderne Roboter sind nicht leicht zu bedienen.
Die Aufgabe für die Probanden bestand im Prinzip aus einer Art Heißer-Draht-Spiel: Der vorn am Roboter montierte Greifer sollte möglichst genau an dem Styropor-Parcours entlang geführt werden, währenddessen natürlich jede Kollision sowohl vorne am Greifer als auch am Rest des Roboterkörpers mit den Umgebungsobjekten vermieden werden sollte. Der Hintergrund: Genau durch diese Art des Führens (englisch: Kinesthetic Teaching) können dem Roboter Aufgaben beigebracht werden. Die in der Interaktion entstandenen Bewegungen werden aufgezeichnet und können auf Befehl schneller, langsamer oder leicht verändert wieder abgespielt werden. Der Fachbegriff hierfür lautet Teach-In und bezeichnet das aktuell übliche Verfahren, um Roboter „anzulernen“.
Wie man in dem Video sieht, geht das zum Teil gehörig schief! Die Versuchspersonen scheinen (trotz einer vorherigen Eingewöhungsphase mit dem Roboter) überfordert von der Aufgabe, dem LBR den Parcours kollisionsfrei beizubringen. Das liegt nicht an der Komplexität der Aufgabe: Eine einfache vorgegebene dreidimensionale Bewegung wie die des Parcours aus der Studie nachzufahren, ist für uns Menschen typischerweise zu bewältigen und wie wir später sehen werden auch in Verbindung mit einem Roboter leicht möglich. Der Grund ist die durch jahrelange Ingenieurskunst geschaffene, komplizierte Technik des LBR, die technische Vorteile, aber auch erhöhte Komplexität mit sich bringt. Denn hinter dem einen „I“ des Wortes „Interaktion“ verstecken sich noch zwei weitere: intuitiv und intelligent. Einem Roboterarm mit sieben Gelenken eine bestimmte dreidimensionale Bewegung beizubringen und dabei gleichzeitig darauf achten zu müssen, dass er mit seinen sieben Achsen nicht mit Hindernissen im Arbeitsraum kollidiert, ist nicht intuitiv. Und eine vorgemachte Bewegung abspeichern und wieder abspielen zu können, ist nicht sonderlich intelligent.
Dieses Beispiel zeigt, dass in der Praxis mehr notwendig ist als nur die technischen Möglichkeiten zu schaffen. Der Schlüssel, davon sind wir überzeugt, liegt in einer systematischen Integration von Hochtechnologie, maschinellem Lernen und einfacher Interaktion. Um ein solches Robotiksystem für den Arbeiter vor Ort bedienbar zu machen, muss die eigentliche technologische Komplexität im besten Fall hinter intuitiven Benutzerschnittstellen und schrittweiser Interaktion versteckt werden. Am Forschungsinstitut für Kognition und Robotik (CoR-Lab) der Universität Bielefeld beschäftigen wir uns seit Jahren genau damit. Das Robotersystem, das oben im Video zu sehen war und auf einem KUKA LBR IV aufbaut, ist unsere Forschungsplattform FlexIRob: ein Beispielszenario, bei dem wir diese Art von Integration untersuchen. Um die obige Aufgabe zu erleichtern, haben wir einen Ansatz entwickelt, mit dem jeder einen solchen Roboter an neue Umgebungen und Aufgaben anpassen kann. Die Idee ist im Prinzip einfach und beruht darauf, die komplexe Aufgabe in zwei Teilschritte zu unterteilen. Dass das funktioniert, ist im folgenden Video zu sehen:
Erleichterung der Interaktion durch Aufteilung in explizite Konfigurations- und assistierte Programmierphase (ab ca 1:15)
Der erste Teilschritt der Aufgabe heißt Konfigurationsphase und ist unabhängig von der Aufgabe, die der Roboterarm später ausführen soll. In dieser Phase bringt der Nutzer bzw. der Mitarbeiter dem Roboter seine neue Umgebung bei, d. h. eventuelle dauerhafte Hindernisse, welche in seinem Arbeitsbereich platziert sind, wie z. B. herumliegende Objekte, Säulen oder Regale. Als Mensch hat er dabei ein intuitives Verständnis der Szenerie: Er sieht die Hindernisse, er weiß, dass und wie man um sie herumgreifen muss und ist deswegen instinktiv in der Lage, den LBR dabei in ausgesuchte Regionen zu führen und dort mit ihm zusammen einige Beispielbewegungen durchzuführen, ohne mit den Hindernissen zu kollidieren. Von diesen Beispielbewegungen kann nun der Roboterarm lernen, wie er sich in seinem Arbeitsbereich zu bewegen und wie er die Hindernisse im Zweifel zu umgreifen hat. Die Methoden zum Lernen, die dabei verwendet werden, gehen über simples Aufnehmen und Reproduzieren hinaus. Mit Hilfe von künstlichen neuronalen Netzen ist das System nämlich nicht nur in der Lage sich innerhalb der trainierten Bereiche zu bewegen, sondern auch zwischen diesen hin- und her zu manövrieren und kollisionsfreie Bewegungen für den Arm zu wählen. Diese Eigenschaft von Lernverfahren nennt man Generalisierungsfähigkeit und beschreibt die Fähigkeit, von wenigen Beispieldaten ein generelles Verhalten zu erlernen und dieses auf unbekannte Daten zu übertragen. In unserem Fall sind die Beispieldaten die Trainingsdaten, welche vom Nutzer zur Verfügung gestellt werden und im Video als grüne Punkte dargestell sind. Von diesen lernt der Roboter innerhalb weniger Minuten, beliebige Zielpositionen anzufahren, ohne dabei mit den Hindernissen zu kollidieren. Und das nicht nur in den Trainingsbereichen, sondern auch darüber hinaus 4.
Im nächsten Schritt, geht es nun darum, ihm die eigentliche Aufgabe beizubringen. Das kann z. B. eine Schweiß- oder Klebenaht sein und auf verschiedenen Wegen passieren, z. B. erneut mit Hilfe von Kinesthetic Teaching, also dem direkten Führen des Roboters. Da dieser sich aber in seiner Umgebung nun schon zu bewegen weiß, braucht der Nutzer nicht mehr alle Gelenke gleichzeitig zu kontrollieren. Es reicht, dass er ihn vorn am Greifer entlang der spezifischen Aufgabe führt und der Roboter assistiert ihm dabei sozusagen bei der Hindernisvermeidung, wie in dem Video ab Minute 2:10 zu sehen ist. Diese Phase nennen wir deshalb Assisted Programming.
Der Knackpunkt zur Vereinfachung dieser Interaktion liegt also in der Aufteilung der Gesamtaufgabe in zwei oder mehr aufeinander aufbauende Teilschritte, um den Nutzer bzw. Mitarbeiter des Roboters nicht zu überfordern. Im letzten Jahr haben wir mit Unterstützung der Firma Harting oben genannte Pilotstudie zum Thema Kinesthetic Teaching durchgeführt und die beschriebene Idee evaluiert. Dabei haben 48 Mitarbeiter, unterteilt in zwei Versuchsgruppen, mit dem System interagiert und versucht, dem Roboter obigen Parcours beizubringen. Die Ergebnisse der einen Gruppe waren bereits im ersten Video zu sehen. Von 24 Versuchsteilnehmern, haben es gerade einmal zwei Probanden geschafft, den Parcours kollisionsfrei abzufahren; eine Probandin brach ihren Versuch nach einiger Zeit frustriert ab. Die zweite Versuchsgruppe hingegen benutzte den assistierten Modus und zeigte signifikant bessere Ergebnisse. Diese Teilnehmer benötigten im Schnitt weniger als die Hälfte der Zeit, um den Roboter anzulernen, die beigebrachten Bewegungen waren signifikant näher an der Vorgabe und wesentlich ruckelfreier.
Unsere Experimente und Studien legen nahe, dass moderne Robotiksysteme durchaus über die Flexibilität verfügen, regelmäßig und vor Ort an wechselnde Aufgaben angepasst zu werden, wie es zum Beispiel für Kleinserienfertigung oder Prototypenbau notwendig ist. Dazu reicht die rein technische Flexibilität allerdings nicht aus, denn sie erfordert immer noch lange Einarbeitung und Robotikexperten. Erst in der Kombination mit lernenden Systemen und einfachen Interaktionsschnittstellen spielen solche Systeme ihr volles Potential aus.
Christian Emmerich und Arne Nordmannsind Doktoranden am Forschungsinstitut für Kognition und Robotik der Universität Bielefeld und beschäftigen sich mit lernenden, interaktiven Robotiksystemen.
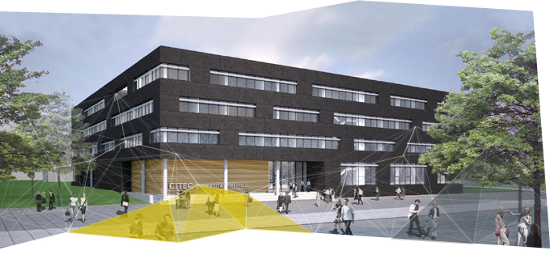
So, es ist soweit, nach drei Jahren verlasse ich im mein bisheriges Büro im Hauptgebäude der Universität Bielefeld und ziehe etwa einen knappen Kilometer weiter auf den neuen Campus der Uni Bielefeld.
Auf der sogenannten schlausten Baustelle Europas entsteht neben neuen Uni- und FH-Gebäuden auch der Forschungsbau „Interaktive Intelligente Systeme“, auf den man in Bielefeld mächtig stolz ist. In seiner Empfehlung zur Förderung von Forschungsbauten an Hochschulen hatte der Wissenschaftsrat nämlich den Antrag zur Errichtung eines neuen Forschungsbaus „Interaktive Intelligente Systeme“ landesweit mit Platz 1 bewertet.
Diese Woche hat 3sat eine Themenwoche „Die Macht der Maschinen“ mit vielen Spielfilmen und Dokumentationen zur vielen unterschiedlichen, gesellschaftlichen Aspekten der Robotik.
Gestern zum Beispiel mit Dokumentation zu unbemannten Drohnen, Roboter für medizinische Operationen und Pflege, etc. Die ganze Woche geht es noch spannend weiter.
Allmonatlich findet am ersten Donnerstag im Monat der Robotik-Stammtisch NRW statt. Wegen der Herkunft der Gründungs- und ständigen Mitglieder wechselt der Stammtisch in der Regel zwischen Dortmund und Bielefeld, in diesem Monat wird er allerdings zum zweiten Mal in Düsseldorf stattfinden, um auch Robotiker aus dem südlichen NRW kennenzulernen.
Wir freuen uns auf neue Gesichter, mit denen wir entspannt ein Getränk zu uns nehmen und über Robotik plaudern können.
Wer an weiteren Terminen und Robotik in NRW interessiert ist, dem sei auch die Robotik-Mailingliste ans Herz gelegt: robotiknrw@lists.cit-ec.uni-bielefeld.de Die Anmeldung ist frei.
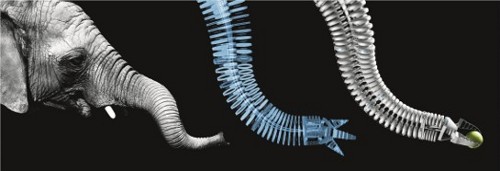
Festos Bionic Handling Assistent (BHA), inspiriert von einem Elefantenrüssel
Schon vor gut einem Jahr habe ich über Festos Bionic Handling Assistent (BHA) geschrieben, der damals frisch mit dem Deutschen Zukunftspreis gekrönt war. Wir haben einen von diesen Robotern bekommen und im April letzten Jahres haben wir bereits hier über unsere ersten Gehversuche und die Simulation des Roboters geschrieben. In diesem Artikel wird es nun darum gehen, wie wir von Babys gelernt haben, den Roboter zu kontrollieren.
Vor einigen Wochen wurde der BHA in der Sendung mit der Maus gezeigt. Wer das Video bis zu Minute 5:00 verfolgt, bekommt jedoch den Haken mit: so faszinierend der Roboter, insbesondere der BHA, auch ist … es ist ebenso kompliziert, ihn zu bewegen.
Die Sendung mit der Maus – Festos BHA und Robotino
In der Sendung und bei den meisten Vorführungen des Roboters steht daher jemand an einer Fernbedienung, oder öffnet und schließt händisch die Ventile, wie zu Beginn des Videos zu sehen. Von einem praktischen Einsatz, bei dem der Roboter eigenständig Aufgaben erledigt, ist das noch meilenweit entfernt.
Das liegt unter anderem daran, dass der Rüssel anders ist, als andere Roboter. Seine elastischen Bewegungen sind sehr schwierig und nur annähernd in mathematische Gleichungen zu fassen. Genau diese Bewegungsgleichungen benötigen aber die klassische Verfahren zur Robotersteuerung. Selbst unser Modell reicht dazu kaum aus, denn es kann keine Auskunft über die Reichweite der vielen Aktuatoren liefern. Diese müsste man sehr genau kennen um den Roboter (klassisch) ansteuern zu können: es ergeben sich schnell sehr große Fehler, wenn der Regler einem Aktuator einen Befehl gibt, der außerhalb seiner Reichweite liegt.
Was das Ganze noch schwieriger macht sind die Verzögerungen im Bewegungsverhalten: der Roboter bewegt sich mittels Luftkammern, die mit Druckluft aufgeblasen werden, die aber erst mit Verzögerung in den Kammern ankommt. Danach dauert es einige Zeit, mitunter bis zu 20 Sekunden, bis der Roboter seine neue Postur erreicht und sich stabilisiert hat. Diese Verzögerungen machen viele der sonst auf Robotern verwendeten Regler praktisch nutzlos, da sie schnelles und exaktes Roboterverhalten benötigen.
Schwierig … aber dafür gibt es maschinelle Lernverfahren, von denen es unzählige Methoden gibt, um Roboter Bewegungen lernen zu lassen. Zunächst muss man den Roboter seinen Bewegungsraum explorieren lassen, also ausprobieren welche resultierenden Bewegungen durch verschiedene Motorkommandos hervorgerufen werden. Da liegt allerdings schon die nächste Krux mit dem BHA, denn: es gibt sehr, sehr viele verschiedene Motorkommandos. Die Standard-Ansätze zum Lernen erfordern, sie alle auszuprobieren. Auf dem BHA benutzen wir aktuell neun Aktuatoren (die Luftkammern). Möchte man pro Aktuator nur 10 verschiedene Kommandos ausprobieren, ergeben sich bereits eine Milliarde (10^9) Kombinationen. Es würde Jahrzehnte dauern, würde man ernsthaft versuchen die alle auf dem Roboter zu explorieren. In der Praxis würde man daher eher zufällige Kommandos auswählen, und einfach irgendwann aufhören. Natürlich ändert das aber auch nichts daran, dass man eigentlich alle Kommandos ausprobieren müsste, damit das Bewegungslernen funktionieren kann.
Was tun?
Um diesem Problem zu begegnen, haben wir uns Inspiration aus der Biologie geholt. Die Aufgabe, den BHA-Rüssel kontrollieren zu lernen, ist nämlich in vielerlei Hinsicht der Aufgabe von Babys sehr ähnlich, in den ersten Lebensmonaten zu lernen, ihre eigenen Gliedmaßen zielgerichtet zu bewegen. Sie müssen dafür lernen, 600 Muskeln zu koordinieren, und sind dabei unglaublich effizient. Was ist also der Trick, den wir lernen müssen, wenn wir unsere Experimente mit dem BHA ähnlich effizient durchführen wollen?
Einen Hinweis liefert eine wegweisende Studie von Claes von Hosten aus dem Jahr 1982. Diese Studie konnte zeigen, dass selbst Neugeborene sich nicht ‐ wie es zuerst scheint ‐ zufällig bewegen, sondern von Beginn an zielgerichtet in Richtung bewegter Objekte greifen. Das folgende Bild zeigt dies unglaublicherweise bereits bei einem wenige Tage alten Baby:
Ein wenige Tage altes Neugeborenes zeigt bereits zielgerichtete Bewegung Richtung bewegter Objekte
Diese Erkenntnis wurde lange von der Machine Learning Community ignoriert, und sollte uns den entscheidenden Hinweis geben. Der von Matthias Rolf entwickelte Ansatz Goal Babbling, versucht nicht mehr durch zufällige Bewegungen den Bewegungsraum zu explorieren (Motor Babbling), sondern tut es von Anfang an zielgerichtet [Rolf et al., 2011]. Die Ergebnisse in Simulation waren vielversprechend, und haben gezeigt, dass dieser Ansatz auch mit 50 Freiheitsgraden zurecht kommt und nicht einmal mehr Zeit benötigt als für einen Roboter mit nur zwei Gelenken. Das ist ein entscheidender Vorteil gegenüber dem zufälligen Explorieren des Raumes, dessen Zeit zum Explorieren exponentiell mit der Anzahl der Dimensionen steigt. Mit Goal Babbling erhalten wir erste brauchbare Resultate bereits nach wenigen hundert Bewegungen, was sogar mit der Geschwindigkeit menschlichen Lernens vergleichbar ist [Sailer and Flanagan, 2005]. Wir können also offenbar wirklich mit der biologischen Vorlage das Lernen massiv beschleunigen! Zeit also, das biologisch-inspirierte Lernen auf dem biologisch inspirierten Roboter anzuwenden.
In unseren ersten Experimenten lernte der Roboter lediglich einfache Bewegungen des Greifers nach links und rechts. Nicht besonders nützlich, aber trotzdem beeindruckend als Live-Demonstration, denn der Roboter konnte innerhalb von zwei Minuten eigenständig lernen, seine neun Kammern zu koordinieren und diese Bewegung auszuführen. Schnell zeigte sich außerdem, wie gut das Verfahren mit Hardware-Defekten umgehen konnte, obwohl wir wahrlich nicht vor hatten, das herauszufinden. Eines Tages während der Experimente stellten wir jedoch ein kleines Loch in einer der Luftkammern fest, durch das Luft entwich: die Kammer konnte sich nicht mehr aufblasen. Schlimmer noch: die Kammer bewegte sich passiv wie eine mechanische Feder mit, was die Bewegung des gesamten BHA-Rüssels beeinflusste. Das Lernverfahren scherte das kaum. Es lernte einfach die anderen Aktuatoren entsprechend einzusetzen ‐ zusammen mit der passiven Bewegung des defekten Aktuators. Wohlgemerkt: wir mussten dem Verfahren dafür nicht mitteilen, dass etwas defekt war. So einfach kann es manchmal sein!
Eine ähnlich gute Entdeckung machten wir, als jemand den Roboter hin und her schob, während er grade explorierte und lernte. Durch das Anschubsen des Roboters konnte man ihm tatsächlich unter die Arme greifen und ihm zeigen, wie sinnvolle Bewegungen aussehen. Schiebt man ihn in die Richtung, in die er sich gerade bewegen will (also die richtige Richtung), spürt man bemerkenswerterweise kaum Widerstand vom Regler. Das Lernen geschieht in diesen Momenten so schnell, das der Roboter die Bewegung schon während des Führens in den gelernten Regler einarbeitet. Folglich reicht es aus, ihm die Bewegung ein einziges mal zu zeigen. Das Ganze ist überhaupt nur möglich, weil das ziel-gerichtete Explorieren und sehr schnelles kontinuierliches Lernen des Goal Babblings mit dem leichten, nachgiebigen BHA-Rüssel aufeinander treffen. Preis-gekrönte 5, biologisch inspirierte Hardware und preis-gekröntes 6, biologisch inspiriertes Lernen.
Bei dem gesamten Vorhaben leistete uns die vorher entwickelte Simulation des Bewegungsverhaltens gute Dienste. Auch wenn das Lernen und Explorieren auf dem echten Roboter stattfand, war die Simulation für allerhand Visualisierungen und zusätzliche Vorhersagen nützlich. So ließ sich nun die Bewegung des Roboters bezüglich selbst-generierter (und ausschließlich virtuell existierender) Ziele während des Lernens darstellen, und das Lernen auf dreidimensionale Ziele (anstatt nur links/rechts) erweitern. Wir konnten nun Einblick in das Lernen nehmen und live während des Lernens vorhersagen, wie gut der gerade lernende Regler verschiedene Positionen im Raum anfahren kann. Wir lernten dadurch, dass sich das Lernen auf dem echten Roboter ganz ähnlich entfaltet wie es unsere ersten Simulations-Experimenten 2010 bis Anfang 2011 (noch komplett ohne den BHA) gezeigt haben.
Biologisch inspiriertes Lernen auf einem biologisch inspirierten Roboter
Auf dem Rüssel liefert Goal Babbling schnell nützliche Ergebnisse. Nach dem Lernen lässt sich der Greifer mit ca. 2 cm Genauigkeit im Raum positionieren. Das ist nicht direkt perfekt, aber reicht in vielen Fällen schon aus, da der flexible Fin-Gripper Gegenstände großräumig mit seinen elastischen Fingern umschließt. Um den Rüssel so schnell und gezielt wie im Video bewegen zu können, darf man nicht auf Feedback (also Bewegungsantworten) vom Roboter warten, da das bei der Pneumatik zu lange dauert. Solch einen Regler, der ohne Feedback auskommt, liefert uns das Lernen. Dadurch weiß der Roboter sofort, wo er hin muss, anstatt sich langsam und Schritt für Schritt ans Ziel heranzutasten. Feedback ist dann lediglich eine zusätzliche Hilfe, die wie in der letzten Sequenz im Video zu sehen, die Genauigkeiten auf 6-8 mm erhöht. In Anbetracht der Tatsache, dass der Rüssel selbst permanent ca. 5 mm hin- und herschwankt, ist das beachtlich.
Erwähnenswert ist außerdem: das Ganze funktioniert nicht nur einmalig und im Video. Wir haben sehr ausgiebige Experimente dazu gemacht, und es funktionierte in jedem Durchgang. Das Lernen von links-/rechts-Bewegungen haben wir regelmäßig in Live-Demos gezeigt, in denen der Roboter binnen 1-3 Minuten seine Bewegungen lernt. Unter Anderem haben wir dies live auf der Automatica 2012 in München gezeigt, auf der das Live-Lernen mit dem Roboter und dem Objekt-Tracking aus dem Video vier Tage lang jeweils acht Stunden lief.
Die gute Nachricht lautet also: es funktioniert! Und es funktioniert robust!
Festos Bionic Handling Assistant ist ein großartiger, spannender Roboter. Er ist nicht nur ein Hingucker durch seine Ähnlichkeit mit dem Elefantenrüssel, sondern seine Struktur macht auch den Umgang und die Interaktion mit ihm natürlich und sicher. Um ihn allerdings auf ähnliche Art und Weise kontrollieren zu können, wie wir es mit anderen Robotern tun, mussten wir einige Hürden überwinden: Ausgangspunkt war ein Roboter ganz ohne Modell und nur mit einfacher Druckregelung. Stück für Stück haben wir ein Vorwärtsmodell der Kinematik, Simulation und Längenregelung hinzugefügt. Der entscheidende Punkt war allerdings, maschinelles Lernen, vor Allem das durch Beobachtung von Babys inspirierte Goal Babbling einzusetzen, das erstaunlich schnell lernt, den Roboter zu kontrollieren.
Jetzt, da wir den Rüssel kontrollieren können, um Objekte zu greifen und zu bewegen: Für welche Aufgaben sollten wir ihn jetzt unbedingt einsetzen?