Vom 7.-8. Oktober werden die dritten DGR-Tage der Deutschen Gesellschaft für Robotik in München stattfinden. Die Veranstaltung richtet sich wie in jedem Jahr primär an Doktoranden und junge Wissenschaftler der Robotik, und ist eine tolle nationale Bühne, um seine Arbeit vorzustellen und zu diskutieren:
„The purpose of the DGR-Days is to foster the scientific exchange among robotics researchers in Germany, in particular young researchers and doctoral students. The organizers are working on the further details which will be posted to the webpage soon.“
Robot Porn auf der Hannover Messe 2013. KUKA Robotics zeigt an seinem Stand eine spektakuläre Show für Roboter-Fans. Mehrere Roboter wirbeln durcheinander, große Roboter tragen sich bewegende kleinere Roboter und machen dabei mächtig was her:
Spektakuläre Show von KUKA Robotics auf der Hannover Messe 2013Spektakuläre Show von KUKA Robotics auf der Hannover Messe 2013
Hier ein Hinweis auf einen Beitrag, den ich heute auf ZDF Info sah. Habe ihn gerade auch auf Youtube gefunden:
Ursprung der Technik: Roboter
Für mich bleibt der verwendete Roboter-Begriff immernoch etwas befremdlich und weit gegriffen. Wenngleich mich einige ungenaue und irreführende Formulierungen sowie der übermäßige Gebrauch von Superlativen etwas stört, finde ich in dem Beitrag dennoch eine nette Zusammenstellung über die historischen Anfänge der Automatisierungstechnik. Der Beitrag hat bei mir letzlich ein wenig Appetit geweckt, mich in Zukunft mit der Materie zu befassen.
Amazon hat zu Ostern ein sogenanntes Osternest, in dem sie in diesem Jahr zwischen dem 25. März und 1. April einige Artikel zu reduzierten Preisen verkaufen – vermutlich Restposten.
Beim Stöbern bin ich dabei auf diesen Staubsaugerroboter gestoßen, der mit einem Preis von 149 EUR äußerst günstig daherkommt: Deebot D54 Roboterstaubsauger
Ich habe keine Ahnung, ob und wie viel der Deebot taugt, er liegt aber immerhin inklusive Zeitprogrammierung, Absturzsensoren, selbstständige Rückkehr zur Ladestation, etc. bei nicht mal der Hälfte des Preises, den man für den Marktführer Roomba mit vergleichbarer Ausstattung bezahlt.
Gerade komme ich zurück vom letztwöchigen European Robotics Forum 2013 (ERF), eine faszinierende Veranstaltung rund um die europäische Robotik. Faszinierend wegen ihrer Mischung aus Politik, Industrie und wissenschaftlichen Beiträgen, und dabei auch getragen von anwesenden Personen, die zu den prominenten Vertretern der europäischen Robotik zählten.
Dass auf dem Forum zusammen mit den dortigen Anhörigen die Strategic Research Agenda für die Robotik-Forschung in den EU der nächsten Jahre mitentwickelt wird, gibt dem zusätzliches Gewicht. In Workshops knien CTOs großer europäischer Robotik-Unternehmen, Robotik-Wissenschaftler und Leiter von Forschungsinstituten gemeinsam um Poster herum, um über zukünftig wichtige Themen und deren Priorisierung zu debattieren. Der Entstehung der (inhaltlichen und politischen) Richtungsentscheidungen der nächsten Jahre in der europäischen Robotik zuzusehen und mitzubekommen, dass dies in einem durchaus konstruktiven Austausch zwischen Industrie und Wissenschaft geschieht, ist eigentlich recht beruhigend.
Wer sich für die strategische Ausrichtung der Robotik, deren zukünftige Themenfelder und Prioritäten, sowie vor allem für die industrielle und akademische Sicht darauf interessiert, für den ist das ERF vermutlich die lohnendste öffentliche Veranstaltung in Europa.
Ich habe viel mit anderen Robotikern sprechen können, Herrn Marsiske vom Heise-Verlag habe ich aber leider verpasst. Der war vor Ort und hat mehrfach über das ERF und die angegliederte Robotik-Messe INNOROBO berichtet:
Ein paar Bilder von der Innorobo-Messe (Ich bitte, die Qualität zu entschuldigen, ich hatte nur meine Handykamera dabei):
AmphiBot, der sich an Land wie ein Salamander fortbewegt …… und im Wasser wie eine Schlange.Roboter mit verbesserter GeländegängigkeitiCub greift nach einem BallDre BioLoid-Stand mit Humanoiden und Hexapod-Robotern
Die Vermeidung unerwünschter elastischer Effekte stellt eine große Herausforderung bei der Konstruktion von Robotern dar. Sie erschweren die präzise Positionierung des Roboterarms aufgrund statischer lastabhängiger Verbiegungen und schwingen nach jeder Bewegung nach. Vergleichbare Beispiele, bei denen Elastizitäten meist unerwünscht sind, finden wir fernab der Robotik bei Baumaschinen, wie Auto-Betonpumpen, Hubwagen aber auch Feuerwehrdrehleitern.
Wie wäre es, wenn auf die Steifigkeit bei der Auslegung einer Maschine weniger Wert gelegt werden müsste, da den damit einhergehenden unerwünschten Effekten mit regelungstechnischem Mitteln begegnet werden kann? Mechanische Strukturen könnten mit schlicht weniger Material leichter gebaut werden. Infolge dessen ließen sich Antriebe kleiner dimensionieren und hätten einen geringeren Energiebedarf.
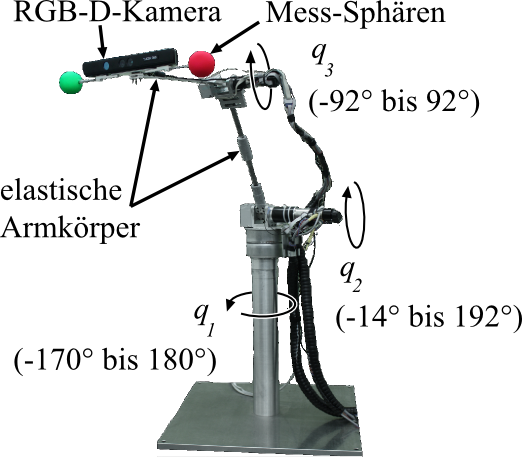
Dieser Gedanke ist genau die Idee hinter dem Forschungsthema, dass ich bearbeite. Im Rahmen des Forschungsthemas haben wir den nachfolgend dargestellten gliedelastischen Roboterarm TUDOR als Experimentalsystem entwickelt.
Das gliedelastische Experimentalsystem TUDOR
Er wird von drei bürstenlosen Gleichstrommotoren angetrieben und besitzt zwei Federstahlbalken als elastische Armkörper. Bei einer typischen Punkt-zu-Punkt-Bewegung der Antriebe treten Schwingungsamplituden von bis zu 10 cm auf.
Auf den Roboter-Konferenzen dieser Welt werden aktuell viele Beiträge zu Robotern mit elastischen Komponenten vorgestellt. Die elastischen Komponenten werden meist in die Robotergelenke integriert. Ein sehr heißes Thema sind vor allem Gelenke, bei denen sich die elastischen Eigenschaften der Komponenten aktiv variieren lassen. Die Elastizitäten bewirken, dass die aufgrund der hohen Getriebeübersetzung üblicher Roboterarme sehr großen Trägheitsmomente der Antriebe von den Trägheitsmomenten des übrigen Arms entkoppelt werden. Das bedeutet, dass im Falle eines physischen Kontakts mit dem Roboter der Interaktionspartner eine geringere Trägheit des Armes „sieht“. Damit kann beispielsweise eine Verringerung des Gefährdungspotenzials des Roboters erzielt werden. Auf der anderen Seite speichern die Elastizitäten zusätzliche Energie, die im Falle eine Kollision freigesetzt und wiederum ein erhöhtes Gefahrenpotential (Peitscheneffekt) zur Folge haben kann. Häufig werden Elastizitäten eingesetzt, um dem Roboter zu natürlicheren und auch dynamischen Bewegungen zu verhelfen. Es ist festzuhalten, dass durch eine geeignete Regelung gezielt eingesetzte elastische Komponenten zahlreiche Möglichkeiten eröffnen.
Aus regelungstechnischer Sicht sind die elastischen Eigenschaften in den Robotergelenken am einfachsten zu beherrschen. Hier ist die Elastizität entlang der Wirkachse der Antriebe konzentriert. Überwiegt die Elastizität in den Roboter Armkörpern, so sind die elastischen Eigenschaften entlang der Armkörper und senkrecht zur Wirkachse der Antriebe verteilt. Die dadurch entstehenden Laufzeiteffekte erschweren eine Regelung des Roboterarms. Dies mag der Grund sein, aus dem derzeit vorwiegend Arbeiten zu gelenkelastischen Roboterarmen publiziert werden.
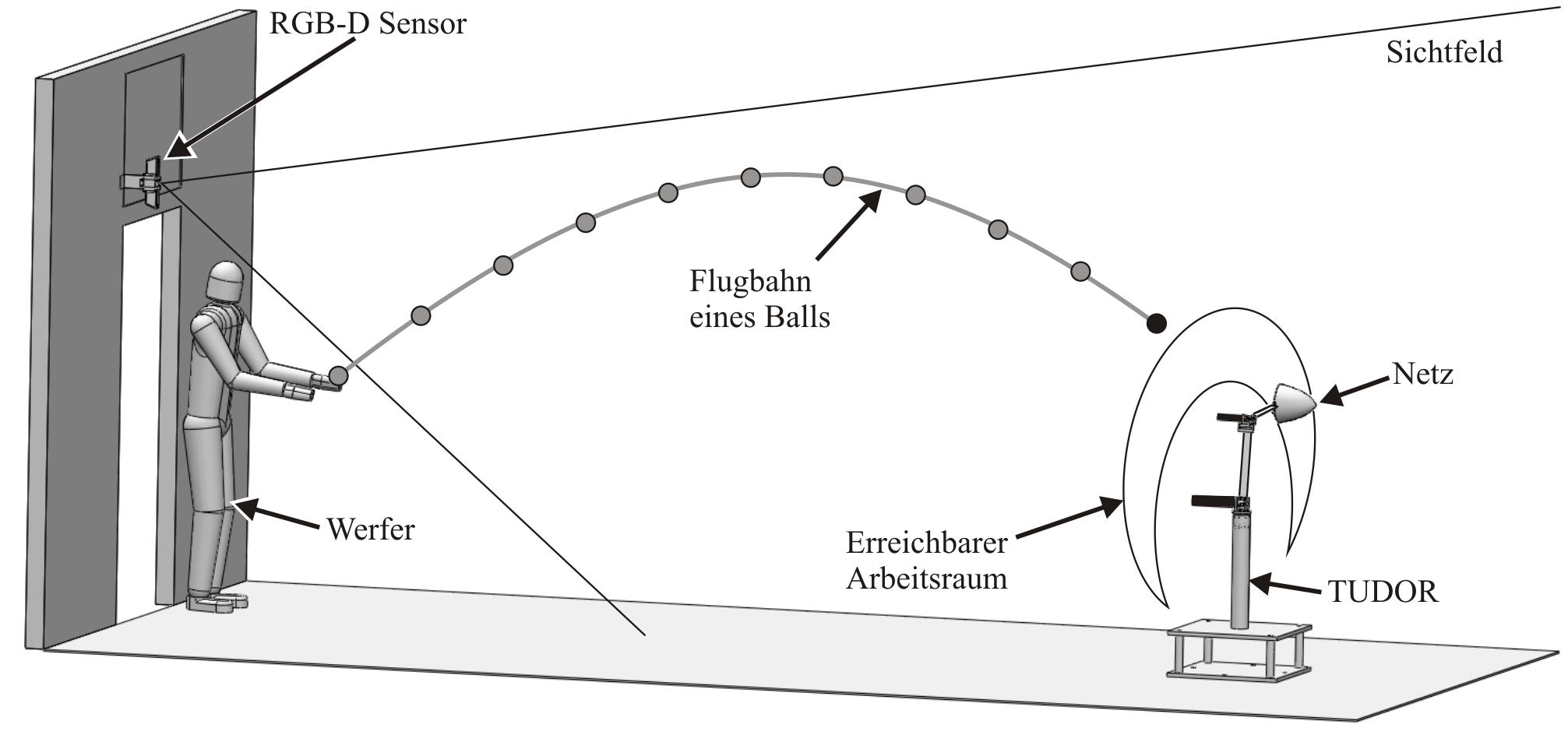
Mit TUDOR hat uns zunächst die Frage interessiert, ob wir mit einem gliedelastischen Roboterarm trotz der Schwingungen und last- und konfigurationsabhängigen variablen Verbiegungen eine zielgerichtete Aufgabe präzise in geforderter Zeit erledigen können. Als Demonstration hierzu haben wir uns, wie im nachfolgenden Bild dargestellt, das Fangen eines Balles ausgedacht.
Ballfangen-Szenario
Ein menschlicher Werfer wirft den Ball in Richtung des Roboters. Die Flugbahn wird mittels einer Kinect-Kamera ermittelt und der Durchstoßpunkt der Flugbahn mit der Bewegungsebene des Roboters berechnet. Bevor der Ball am Roboter vorbei fliegt, bewegt der Roboter ein am Armende montiertes Netz dorthin und fängt den Ball damit auf. Das Resultat haben wir im nachfolgenden Video zusammengefasst:
A multi-link-flexible robot arm catching thrown softballs.
Sofern die Schwingungen regelungstechnisch unterdrückt und Abweichungen aufgrund statischer Verbiegungen kompensiert werden können, ließen sich in manchen Anwendungen diese elastischen Eigenschaften vielleicht nicht mehr nur als Problem verstehen. Vielmehr könnten elastische Eigenschaften vielleicht auch ausgenutzt werden, um beispielsweise Kontaktsituationen zu erkennen und darauf zu reagieren. Mit aktiv geregelten moderat gelenkelastischen Roboterarmen wurde dies ja bereits eindrucksvoll gezeigt.
Bezüglich gliedelastischer Roboter ist die Dämpfung auftretender Schwingungen bislang noch das dominierende Thema in Publikationen.
In den vergangenen Tagen konnten wir hier womöglich einen ersten Schritt über die reine Schwingungsdämpfung hinaus machen. Basierend auf einer Kraftregelung ist es uns gelungen ein Regelungskonzept zu entwickeln, bei dem wir die Schwingungen der mechanischen Struktur eines Roboterarms unterdrücken und zugleich die Nachgiebigkeit aktiv beeinflussen können. Einige Experimente dazu haben wir in nachfolgendem Video festgehalten:
Video zur Kraftregelung eines gliedelastischen Roboterarms
In dem Regelungskonzept wird die Information über die auf die Robterarme einwirkenden Kräfte mittels Dehnungsmessstreifen erfasst und individuell auf die Antriebsregler zurückgeführt. Auf diese Weise werden Schwingungen in der Armstruktur unterdrückt obgleich sie von der Gelenkbewegung oder der Interaktion mit der Umgebung herrühren. Zusätzlich lässt sich die Nachgiebigkeit des Roboterarms derart beeinflussen, dass wir mit sehr wenig Kraft den Roboterarm aus seiner aktuellen Position schieben können und die Wahrscheinlichkeit fragile Objekte bei einer unvorhergesehnen Kollision zu zerbrechen deutlich reduziert wird.
Also: elastische Roboterarmkörper – Fluch oder Segen? Trotz dieser Experimente sind noch zahlreiche Herausforderungen zu meistern und fragen zu beantworten. Dennoch scheint es mir, als schlummertem in den Elastizitäten der Armkörper nicht nur Probleme, sondern auch Potenziale.
Ich freue mich darauf zu sehen, wo die Reise noch hinführen wird.
Ein kleiner Programmhinweis: Gleich, heute um 15:00 Uhr läuft im WDR die Sendung Planet Wissen – „Die Roboter kommen“.
Zu Gast sind unter Anderem Dr. Alin Olimpiu Albu-Schäffer vom Deutschen Zentrum für Luft- und Raumfahrt und Prof. Jochen Steil, vom CoR-Lab in Bielefeld.
Es wird eingie Roboter zu sehen geben und sicher interessant.
Ein Massage-Roboter: Viele Leute, denen ich davon erzählte, wollten so ein Ding haben. Ein witziges kleines Gadget, das mal wieder jemand anders vor mir erfunden hat:
https://youtube.com/watch?v=4EhlZFf2WEwDer Roboter kommt zur Schulter gefahren, sobald man sich aufsetzt.
Ein robotisches Kunstprojekt: In Japan wurde ein 4.5 Tonnen schwerer und vier Meter hoher 1 Mech vorgestellt, der Kunststoffkugeln und Wasserflaschen verschießen kann. Man kann ihn kaufen, sich reinsetzen und ihn fahren, er lässt sich aber auch per Smartphone vernsteuern. Man mag davon halten was man will, aber über zwei Millionen Menschen wollten 2 die Videos zu diesem Projekt sehen.
Ein Zweirad mal anders : Eigentlich kein Roboter, aber von der Idee über die Entwicklung bis zum Dreh des Videos kann ich mir vorstellen, dass hier eine Menge Spaß mitgefahren ist:
Das sieht nach Spaß aus!
Eine Roboterhand mit integrierter Kraft-Regelung und zahlreichen Greifmöglichkeiten. Dabei bleibt die Hand nahezu in der Größe ihres menschlichen Vorbildes.
https://youtube.com/watch?v=T8n9E_QeUeURecht schlank schaut sie aus.
Die Robotik-Softwareschmiede Willow Garage feiert das Fünfjährige ihres open-source Robot Operating System (ROS) mit diesem coolen Artikel und diesem coolen Video:
https://youtube.com/watch?v=zV48Pq0muEkROS: Five Years
Der Artikel zeigt beeindruckend, welche Verbreitung ROS in den letzten fünf Jahren in der wissenschaftlichen Robotiklandschaft erhalten hat, zum Beispiel die Anzahl der offiziell unterstützten Roboter (beeindruckende achtundzwanzig), womit es unter den sonst in der Robotik häufigen Einzellösungen positiv hervorsticht.
Und das alles frei verfügbar unter der BSD-Lizenz!
Glückwunsch! Und alles Gute für die nächsten fünf Jahre.