100 Beiträge hat dieses noch junge Blog in den letzten neun Monaten angesammelt. Spaß hat es mir bislang gemacht und mehr und mehr Leser interessieren sich für die Beiträge – seit Beginn etwa 12.500 Leser. Aus eigenem Interesse habe ich mal die Begriffe extrahiert, die hier die bisherigen Beiträge dominiert haben:
Roboter (insgesamt 209 mal – 154 mal Roboter, 29 mal Robot und 26 mal Robotern)
Robotik (83 – 46 mal Robotik, 22 mal Robotics und 15 mal Robotische)
Roomba (44)
Video (55 – 41 mal Video und 14 mal Videos)
Zeit (28)
Jahr (41 – 27 mal Jahr und 14 mal Jahren)
Buch (26)
iRobot (22)
Menschen (19)
University (17)
Natürlich ohne Gewähr, die Begriffe sind durch ein einfaches, schnell zusammengeschriebenes Script extrahiert.
Für die nächsten hundert Beiträge wünsche ich mir übrigens mehr Kommentare und Feedback von den Bloglesern. Ob Kommentare zu einzelnen Beiträgen, zu den hiesigen Themenfeldern oder Kritik am Blog selbst … ich freue mich über Rückmeldung.
Wie in letzter Zeit vielfach in der Presse zu lesen und auch in diesem Blog bereitserwähnt, werden mittlerweile unbemannte Drohnen vom Militär gerne eingesetzt. Eigentlich müsste man davon ausgehen, dass diese Maschinen, wenn sie unbemannt und halb-autonom, zudem mit Waffen ausgerüstet, durch die Gegend fliegen, höchste Sicherheitsstandards erfüllen. Aktuelle Entwicklungen rund um die Drohnen und Aussagen des Militärs lassen den beunruhigenden gegenteiligen Schluss zu.
Die Drohnen fliegen halb-autonom und werden von Piloten am Boden ferngesteuert. Die Drohnen, die in Afghanistan eingesetzt werden, werden zur Zeit besonders gerne von Piloten aus Nevada in den USA gesteuert. Die sitzen dort und übermitteln die Kommandos anhand der Video-Informationen, die sie ihrerseits von der Drohne übertragen bekommen, per Satellit. Bricht die Satellitenverbindung ein, ist die Drohne so schlau, erst einmal an der aktuellen Position zu kreisen, um auf die Wiederaufnahme der Verbindung zu warten. Geht der Treibstoff aus, sind die Drohnen so programmiert, dass sie zu ihrer Basis zurückkehren.
Das funktioniert allerdings nicht immer wie gewollt, wie kürzlich eine irische Drohne demonstrierte, die in Zentralafrika ihren Einsatz flog. Diese Drohne hatte fälschlicherweise noch ihre irische Heimatbasis einprogrammiert und stürzte folgerichtig auf ihrem viel zu langen Rückflug in der Wüste ab. 1 Ist eine solche Maschine mit Bomben beladen und stürzt nicht in die Wüste, sondern in besiedelte Gebiete, sind die Folgen katastrophal. Aktuelle Drohnen tragen bislang nämlich noch keine Selbstzerstörungs-Mechanismen für solche Fälle an Bord.
Bewaffnete Reaper MQ-9
Letzten Sonntag entschloss sich eine in Afghanistan eingesetzte Drohne vom Typ MQ-9 Reaper, nicht mehr auf die Befehle ihres fernsteuernden Piloten zu hören. Da sich die Drohnen allerdings selbstständig in der Luft halten, flog sie weiter und hielt dabei unaufhörlich auf fremden Luftraum zu. Da die Kontrolle über die Maschine nicht mehr wiederzuerlangen war, wurde kurzerhand ein bemannter Kampfjet entsandt, der die Drohne abschoss um sie so in einen unbewohnten Berghang stürzen zu lassen. Klingt das nach sicherer Technik?
Zur allgemeinen Flugsicherheit dieser ferngesteuerten Drohnen heißt es bei Popular Science:
More than a third of the 200 Predators delivered to date have crashed catastrophically, due to both aircraft malfunction and human error. One pilot executed a hard left at high speed—perfectly doable in a manned combat craft but not a maneuver the Predator, powered by a snowmobile engine, can handle; it flipped over and spiraled out of control. Several other operators accidentally switched off the engine mid-flight. One inadvertently erased the onboard RAM, and with it any hope of controlling the aircraft. “That this was even possible to do during a flight is notable in itself and suggests the relatively ad hoc software development process occurring for these systems”, wrote human-error specialist Kevin Williams of the Federal Aviation Administration in a 2004 analysis of UAV crashes. As Colonel John Montgomery put it to a group of reporters at Creech last March, “We’re on the ragged edge”.
Es lässt sich also tatsächlich bei den Drohnen im Flug unabsichtlich der Motor abstellen, die Software löschen und es lassen sich Flugmanöver vorgeben, die mit den Flugeigenschaften der Drohne nicht vereinbar sind und damit unweigerlich zum Absturz führen. Etwas, was zum Beispiel bei modernen Passagiermaschinen undenkbar ist, die dafür zahlreiche, redundante Sicherungssysteme in sich tragen. Also warum nicht bei Maschinen, die mit bis zu 16 Bomben bestückt über die Häuser kreisen?
Wie hier schon zu lesen war, habe ich mich vor einigen Tagen für einen Roomba entschieden. Ich bereue nichts, der Roomba macht seine Arbeit vortrefflich und mir eine Menge Freude. Nichtsdestotrotz lohnt sich bei einer Neuanschaffung immer auch ein Blick auf die Konkurrenz. Auf der IFA stellen gleich zwei Hersteller ihre Roomba-Konkurrenten vor: Goldluck und LG Electronics.
Der Roboking von LG bringt zusätzlich zur Infrarotsensorik auch noch Ultraschallsensorik mit, was weiter das Anrempeln von Möbeln und Gegenständen reduzieren soll. Spiegelnde und durchsichtige Flächen – mit denen Roombas Infrarotsensoren naheliegenderweise ihre Schwierigkeiten haben – dürften dadurch allerdings genausowenig erkannt werden. Außerdem bringt der Roboking zwei statt nur einer seitlichen Eckenbürste und nach eigenen Angaben eine bessere Saugleistung mit. Darüber hinaus beherrscht er vier statt drei verschiedene Reinigungsmuster. Dass er dafür preislich allerdings erst gut vierstellig startet, macht ihn nicht zum klassischen Roomba-Konkurrenten. Denn Roomba ist nicht zuletzt wegen seines vertretbaren Preises der erste erfolgreiche Roboter für den Massenmarkt geworden.
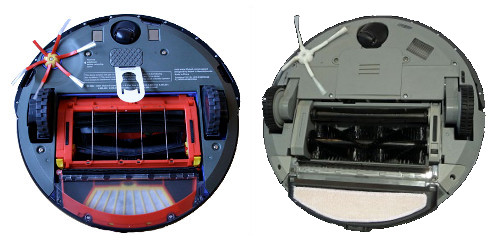
Goldluck hingegen bietet seinen Staubsaugerroboter ab 180 EUR an und damit sogar noch unter den Roomba-Einsteigermodellen. Goldluck sucht dafür im Moment noch einen Handelspartner für Europa. Optisch und technisch scheint der Goldluck-Roboter dem Roomba – zumindest von der Außenperspektive – sehr ähnlich zu sein. Die beiden Ansichten von unten sind kaum zu unterscheiden, von der Platzierung der drei Bürsten bis zum Staub-Auffangbehälter.
Ansicht von unten, Roomba (links) und Goldluck
Allerdings – so räumt ein Goldluck-Mitarbeiter gegenüber Golem ein – beschäftigt Goldluck für die Entwicklung „nur 30 statt 300 Entwickler“ (im Vergleich zu iRobot). Wegen des niedrigen Preises allerdings trotzdem möglicherweise eine Alternative.
Es gibt mittlerweile eine Vielzahl an Herstellern von Staubsaugerrobotern – gerade in Asien. Vielleicht mache ich bei Gelegenheit mal eine Gegenüberstellung der verschiedenen Modelle.
Motoman hat mit seinen Robotern in letzter Zeit schon gezeigt, wie man kochen oder Cocktails zubereiten kann, hier zeige ich jetzt ein etwas realistischeres Video diesen Jahres von Motoman. Der Roboter setzt in dem Video einen Bürostuhl aus seinen Einzelteilen zusammen.
Motoman baut einen Bürostuhl zusammen
Dies ist eine Arbeit wie sie genau so in der Fertigung getan wird, allerdings hauptsächlich von geübten Personen. Der Roboter setzt den Stuhl in dem Video mit beeindruckender Eleganz zusammen und arbeitet dabei mit beiden Armen parallel. Dies führt zu seltsam vertrauten, menschenähnlichen Griffen und Bewegungen.
Das kommt nicht von ungefähr, denn diese Roboterarme haben 15 Freiheitsgrade und damit ungefährt so viele wie ein menschlicher Arm. Dass sie so hübsch parallel arbeiten (der eine Arm hält zum Beispiel den Stuhl fest, während der andere Arm schraubt), sieht man bislang selten. Das liegt vor allem an dem gesteigerten Programmier- und Rechenaufwand zur Kollisionsvermeidung, lässt man zwei Roboterarme im gleichen Arbeitsraum miteinander arbeiten.
Es ist leicht vorstellbar, dass Roboter in Zukunft bei solchen Arbeiten eingesetzt werden. Mit all ihren bekannten Vorteilen für den Arbeitgeber gegenüber menschlichen Arbeitern: Kein Gehalt, 24-Stunden-Schichten, 7-Tage-Woche, …
Die Zahl der Roboter steigt kontinuierlich und immer schneller. Nicht nur Roboter in der Forschung, sondern auch in der Anwendung. Bei Industrierobotern ist das nun schon seit einigen Jahren der Fall, mittlerweile kommen aber auch – wenngleich bislang hauptsächlich in Japan und Südkorea – autonome, mobile Roboter hinzu. Etwa Spielzeug- und Therapieroboter, sowie Roboter für den Ottonormalverbraucher, wie zum Beispiel Staubsauger-, Wisch- und Rasenmäh-Roboter.
Um diese Entwicklung etwas im Auge zu behalten will ich im Folgenden regelmäßig in einer Übersicht neue Roboter vorstellen. In diesem ersten Teil werde ich mit einem Roboter beginnen, der nicht neu ist, über den ich aber schon seit längerer Zeit schreiben wollte, weil er unheimlich beeindruckend ist: BigDog. Außerdem ein Gymnastiktrainer und ein fahrender Feuerlöscher.
BigDogBigDog
BigDog wurde 2005 im Auftrag der DARPA von Boston Dynamics, der NASA und der Harvard University entwickelt. Der Roboter wurde für das Militär quasi als modernes Maultier entwickelt. Er ist ca. 6 km/h schnell und kann 150 Kilogramm auf seinem Rücken tragen.
BigDog ist ein vierbeiniger Roboter, der vor allem durch seinen dynamischen Gang auffällt. Im folgenden Video ist zu sehen, wie er durch verschiedene Terrains marschiert und dabei widrigen Bedingungen ausweichen muss. Er geht über unsicheren Untergrund wie Schnee und Laub oder wird während der Bewegung gestoßen. Sieht man den Roboter mit dem Untergrund kämpfen und stolpern, wirkt er fast lebendig. Die Szene im Video, in der BigDog auf Glatteis ausrutscht, stolpert und sich wieder fängt, wirkt so realistisch, dass ich es beim ersten Ansehen fast beängstigend fand. Die Szene findet sich ca. ab Minute 1:25 im Video und lässt einen unbewusst daran zweifeln, dass dies wirklich eine Maschine und kein Tier ist.
BigDog in verschiedenen Terrains
Eine Weiterentwicklung von BigDog, die nicht so laut, dafür aber deutlich leistungsfähiger sein soll, ist bereits in Entwicklung.
TaizoTaizo, Gymnastiktrainer
Taizo ist ein relativ junger humanoider Roboter. Er erinnert optisch an einen Astronaut in Clownschuhen und ist als Gymnastik-Lehrer für ältere Japaner konstruiert. Er ist 20 Zentimeter groß, wiegt 7 Kilogramm und kann mit seinen insgesamt 26 Gelenken verschiedene gymnastische Übungen vortanzen.
Taizo wurde vom National Institute of Advanced Industrial Science and Technology (AIST) entwickelt und turnt die Übungen sowohl im Stehen als auch im Sitzen auf seinem Stühlchen, das er mitbringt. Er soll im nächsten Jahr für ca. 8000 US-Dollar zu kaufen sein.
Unter dem Namen HRP-2m Next gibt es den Taizo auch nackt, also ohne das lustige Kostum, für Forschung und Lehre.
Taizo als Gymnastiktrainer
FINEFINE
FINE, First INtelligent Extinguisher („Erster, intelligenter Feuerlöscher“), ist ein Design-Konzept für einen autonomen Feuerlöscher. Der Roboter ist ein kleines Gefährt, das einen Feuerlöscher in sich trägt. Der Feuerlöscher kann im Normalfall einfach entnommen und zum Löschen benutzt werden. Bricht das Feuer allerdings aus, wenn gerade niemand zu Hause ist, nimmt FINE das Problem selbst in die Hand.
Entwickelt von Benjamin Davoult und Baptiste Lanne und ausgezeichnet mit dem James Dyson Award. Das nachfolgende Video zeigt, wie der Einsatz des Roboters aussehen soll:
Der Biologe Robert Full hat auf einer der wunderbaren TED-Konferenzen einen fantastischen, inspirierenden Vortrag darüber gehalten, wie er und seine Truppe einen Roboterfuß nach dem Vorbild verschiedenster Tiere konstruiert haben.
Er beschreibt anschaulich mit vielen Bildern, Musik und Videos, welche überraschenden Erkenntnisse sie gesammelt haben, welche lustigen Experimente sie gemacht haben und wie die Ergebnisse sich mittlerweile schon in mehreren Robotern wiederfinden.
Das Video ist in englischer Sprache und ungefähr 20 Minuten lang. Es gibt auf zwei Beinen laufende Oktopusse, kybernetische Krabben und einen unterhaltsam vortragenden Forscher. Anschaubefehl!
Alle Entwicklungen der Robotik im Auge zu behalten, ist schwierig, da in den letzten Jahren – und wohl auch in den kommenden – so viel passiert. Es gibt aber einzelne Entwicklungen, die mir ganz anschaulich bewusst machen, was da in der nächsten Zeit auf uns zukommen mag. Hier ist eine davon: Roboter, die fast beliebige Materialien senkrecht hochfahren können.
Roboter klettert mit Elektroadhäsion
Ich hatte bereits in einem früheren Blogeintrag gezeigt, wie Roboter mühelos Wände verschiedener Materialen hochsteigen. Dabei waren jedoch für die unterschiedlichen Materialen verschiedene, dafür angepasst, Roboter eingesetzt. Sie verfügten entweder über hunderte kleiner Krallen, um an rauen Oberflächen zu klettern oder über kleine Saugnäpfe, um glatte (Glas-) Wänder zu besteigen.
Klettern an einer Mauer [SRI]
Was das SRI International (früher Stanford Research Institute) jetzt zeigt, ist um ein vielfaches beeindruckender. Mit den neuen Techniken findet der Roboter sowohl an glatten als auch an rauen Oberflächen Halt, und dieser Effekt kann sogar beliebig ein- und ausgeschaltet werden. Die Technik nennen die Forscher Elektroadhäsion. 2 Die Technik kann so eingesetzt werden, dass der Roboter nicht klettern muss, sondern die Wände in normaler Geschwindigkeit hochfährt.
Folie trägt ein Gewicht [SRI]
Adhäsion ist der durch „molekulare Wechselwirkungen in der Grenzflächenschicht hervorgerufene mechanische Zusammenhalt der beteiligten Phasen“ (Wikipedia). Also der Zusammenhalt zwischen zwei Materialen durch Anziehungskräfte zwischen deren Molekülen. Während Adhäsion zwischen Flüssigkeiten und glatten Materialen stattfindet (zum Beispiel Schutzfolien auf Displays), kann die Elektroadhäsion zwischen einer großen Zahl verschieden gearteter Materialien stattfinden und durch Anlegen von Spannung sogar beliebig ein- und ausgeschaltet werden. Das Prinzip ist das eines Luftballons, das man an einem Pullover reibt und dann irgendwo anheften kann. Der Roboter muss allerdings keinen Ballon und Pullover mit sich führen, sondern erledigt dies über einen Akku, den er mitführt.
Beeindruckend sind dabei vor Allem auch die Kräfte und der Energieverbrauch dieser Technik. Die Elektroadhäsionsfolie kann Kräfte bis zu 1.4 Newton pro Quadratzentimeter aufbringen und hat dabei einen Verbrauch von gerade einmal 20 Mikrowatt pro Newton. Eine Fläche von einem Quadratmeter kann dadurch über eine Tonne tragen und verbraucht dabei gerade einmal 0,3 Watt. Beeindruckend.
Mehr dazu gibts direkt beim SRI International oder als Paper bei IEEE. Im Folgenden ein paar Videos, die Roboter zeigen, die mit dieser Technik, Wände verschiedener Materialien hochsteigen:
HolzElektroadhäsion an einer HolzwandTrockenmauerElektroadhäsion an einer TrockenmauerBetonElektroadhäsion an BetonGlasElektroadhäsion an Glas
Seit vorgestern besitze ich einen iRobot Roomba und habe ihn bereits vollständig in mein Herz geschlossen. Meine Wohnung ist jetzt sauberer als sonst und ich habe nicht nur dafür keinen Finger rühren müssen, sondern habe zusätzlich dazu einen autonomen Roboter in meiner Wohnung rumdüsen. Fantastisch!
Roomba 560
Ich habe mich für den Roomba 560 entschieden, weil dieser aufgrund der aktuellen Preisschwankungen bei Amazon kurzfristig deutlich reduziert war. Was ihm gegenüber dem teureren Modell Roomba 580 fehlt, ist glaube ich im Wesentlichen die Fernbedienung. Der Roomba 560 kommt mit Timer und mit zwei Virtual Wall Lighthouses, die ich − wie gesagt − gegenüber den einfachen Virtual Walls empfehle.
Folgerichtig wurde ich heute und gestern morgen von einem Roomba geweckt, der sein Tagewerk mit einem freudigen Piepsen und ansurrenden Bürsten begann. Das geschah natürlich nicht unabsichtlich, den Timer hatte ich bewusst so eingestellt − zu meiner Freude am Morgen.
Es ist ganz erstaunlich, wie schnell der Roomba eine Zimmerfläche vollständig abgegrast hat, selbst wenn das Zimmer verwinkelt und mit zahlreichen Möbeln verstellt ist. Der Roomba benutzt dabei im Wesentlichen drei verschiedene Bewegungsmuster, die er im Wechsel je nach Situation wählt, um das Zimmer zu erschließen:
Spiralförmig in der Mitte des Zimmers
Zick-Zack durchs Zimmer
Die Wand entlang (mal linksrum, mal rechtsrum)
Ich empfehle, die erste Säuberung in jedem Zimmer mit wachem Auge zu begleiten, um das zu tun, was man auch sonst beim manuellen Staubsaugen tut: Kleinteile aus dem Weg räumen. Roomba hat zwar auch mit kleinen Teilen wie Schrauben, kleinen Notizblöckchen usw. keine Probleme, diese landen in seinem Auffangbehälter. Man sollte es allerdings möglichst nicht riskieren, dass er sich an diesen Teilen doch verschluckt und vor allem auf Papierschnipsel und Kabel/Fäden achtgeben.
Der Roomba ist durch seine Höhe von knapp zehn Zentimetern auch in der Lage, unter die meisten Schränke, Betten und Sofas zu krabbeln. Ich habe daher bei dem ersten Lauf meines Roombas den Bereich unter meinem Bett zur Vorsicht mit einer Virtual Wall abgesperrt. Allerdings hauptsächlich, da ich annehme, dass der Roomba ansonsten in Streik getreten wäre oder eine Versetzung beantragt hätte.
Selbstständig zurück zur Basisstation
So hat der Roomba jetzt bereits zweimal via Timer seine Tour durch die Wohnung begonnen und mehrere Füllungen seines Staubbehälters aus der Wohnung befördert. Nach jeder Reinigungstour, die ich mit den Virtual Wall Lighthouses grob vorgegeben habe, kehrt er selbstständig zu seiner Basisstation zurück, um sich aufzuladen und auf den nächsten Start zu warten. Mit den Virtual Wall Lighthouses teilt man Roomba die Trennung zwischen einzelnen Räumen mit. So bleibt Roomba dann ungefähr 20 bis 25 Minuten in einem Raum und wechselt dann selbstständig in den nächsten. Zum Ende dienen die Lighthouses dem Roomba dazu, den Rückweg zu rekonstruieren und somit sicher zur Basisstation zurückzufinden.
Zu Beginn habe ich dem Roomba eigentlich die ganze Zeit zugesehen, habe die verschiedenen Reinigungsmuster beobachtet und war damit beschäftigt, ihm Hindernisse in den Weg zu stellen und zu sehen, wie er sich aus den Situation freifährt. Nachdem ich das eine verrückt lange Zeit getan habe, habe ich ihm die Küche überlassen und habe mich zurück an die Arbeit begeben. Die ganze Zeit das leise Surren im Ohr und immer die hörbare Rückmeldung, wenn er gerade wieder in der Ecke der Küche angekommen war, in der bei mir die Pfandflaschen auf dem Boden stehen. *kling**pling*
Als ich ihn später ins Badezimmer setzte − eine ziemlich kleine Bodenfläche − schloss ich die Tür, damit er dort in Ruhe reinigen kann, ohne versehentlich den Raum zu verlassen, hier hatte ich nämlich noch kein Lighthouse aufgestellt. Nach ca. 10 Minuten hörte ich, wie Roomba sich abschaltete und mir durch ein fröhliches Piepen signalisierte, dass er den Raum nun für sauber befindet und bereit für den nächsten Raum ist.