Ein weiterer Artikel aus der Serie „Roboter gegen COVID-19“: Pepper erinnert uns daran, unsere Mund-Nasen-Bedeckung (MNB) zu tragen.
Die Mund-Nasen-Bedeckung hilft Pepper sicher nicht. Sie soll aber daran erinnern, eine zu tragen.
Geplante Einsatzorte für Pepper sind sowohl Geschäfte als auch Büros, in denen Menschen auch mal versehentlich vergessen, Ihre Masken zu tragen. Die in Pepper eingebaute, auf OpenCV basierende Gesichtserkennung kann das erkennen und ein entsprechendes Verhalten bei Pepper auslösen. Erkennt Pepper etwa, dass die untere Gesichtshälfte nicht ordentlich bedeckt ist, weist der Roboter freundlich darauf hin („You have to always wear a mask properly.“, etwa: „Sie müssen ihre Maske immer ordentlich tragen.“). Setzt die betreffende Person ihre Maske dann allerdings auf, bedankt sich Pepper auch artig: „Thank you for having put on your mask“ (etwa: „Danke für das Ausetzen der Maske“).
Wie im folgenden Video zu sehen ist, kann Pepper mehrere Personen gleichzeitig nach Masken scannen und zeigt diese auf seinem Display entweder mit roter Umrandung (trägt keine MNB) oder grüner Umrandung an:
Pepper erinnert Menschen an das Tragen ihrer Mund-Nasen-Bedeckung
Das Verhalten des Roboters kann laut Hersteller SoftBank noch erweitert werden, zum Beispiel dem Geschäft zu melden, wenn sich in ihm Personen ohne Masken aufhalten. Als Roboter-Polizei sei das nicht gedacht, versichert man bei SoftBank, sondern nur als freundliche Erinnerung. Nunja…
Im Video ist leider nicht zu erkennen, wie gut das wirklich funktioniert. Dort wirkt es doch etwas aufgesetzt und alle Personen beugen sich ganz deutlich vor die Kamera des Roboters. Solch optimalen Bedingungen für die Gesichts- bzw. Maskenerkennung dürfte es im echten Geschäfts- und Büroumfeld doch seltener geben.
Wie Boston Dynamics heute bekannt gab, ist der kleine, flinke Vierbeiner Spot jetzt nicht mehr nur in den USA, sondern auch Europa, Großbritannien und Kanada erhältlich.
Spot
Spot ist für schlappe 74,500$ zu haben und innerhalb von 6-8 Wochen bei Dir. Wenn das kein Schnäppchen ist … Großkunden und Universitäten kommen sogar noch günstiger dran.
Hier nochmal das tolle Launch-Video aus dem letzten Jahr:
Bei Merck in Darmstadt ist Spot sogar schon im Einsatz. Zusammen mit Energy Robotics wurde Spot dort in Betrieb genommen, um die Anlagen des Chemieunternehmens zu inspizieren.
Eigentlich sollte im Oktober diesen Jahres die alljährliche ROSCon, eine Konferenz rund um ROS, das Robot Operating System, in New Orleans stattfinden. Vernünftigerweise passiert das wegen der COVID-Pandemie natürlich und leider nicht. Stattdessen findet in diesem Jahr als Ersatz zum ersten Mal überhaupt ein ROS World statt.
Die ROS World 2020 wird eine virtuelle 1-Tages-Konferenz am 12. November, die die ROSCon ersetzt und der ROS-Community einen Ausgleich geben soll, sich trotzdem auszutauschen und vernetzen zu können. Wie bei einer ROSCon wird es natürlich auch bei der ROS World viele Vorträge aus der Community geben, die im Live Stream übertragen werden. Dazu kommen Diskussionsforen, 1-zu-1-Videochats zwischen Teilnehmer:innen und Interaktionsmöglichkeiten während des Vortrags zum Fragenstellen und Abstimmen über Themen.
Ich habe mich auf jeden Fall schon als Teilnehmer registriert, vielleicht werde ich mich auch noch an einem Beitrag beteiligen (etwa zu micro-ROS). Die Registrierung zum Event scheint erstmal kostenlos zu sein, zumindest noch bis zum 5. Oktober. Hier geht’s zur Registrierung!
Die nächste ROSCon gibt es dann voraussichtlich vom 21. – 22. Oktober, natürlich in New Orleans.
Eine dringende Frage der Community wurde auch schon beantwortet: Ja, es gibt T-Shirts! 😉
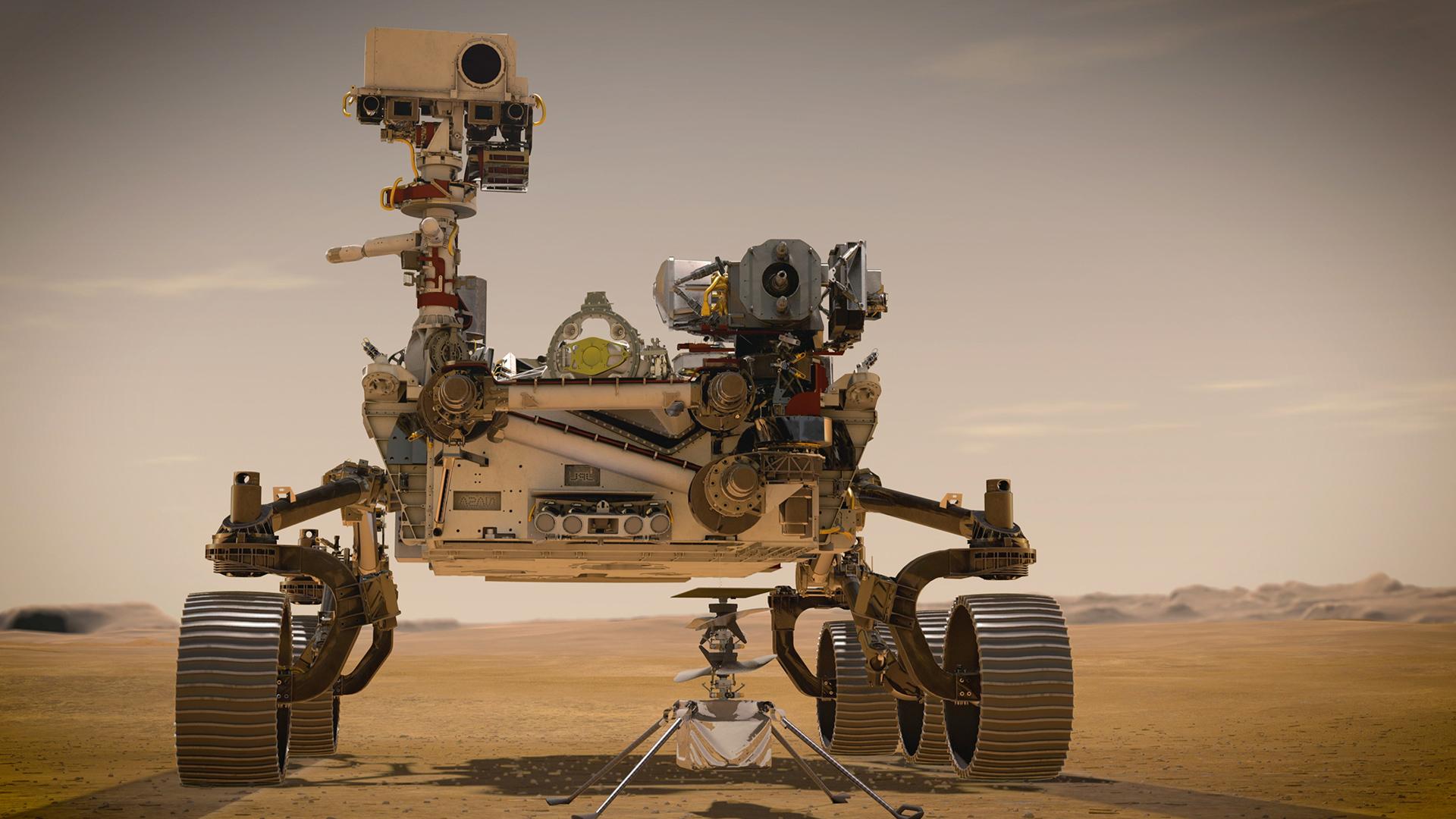
Im März hatte ich im Rahmen der öffentlichen Namensfindung schon über den neuen Mars-Rover Perseverancegeschrieben. Übermorgen, am 30. Juli, soll er sich jetzt endlich auf den Weg zum Mars machen – mit deutscher Beteiligung. Der Rover ist mit seiner umfangreichen Sensorik an sich schon recht komplex, trägt aber zusätzlich noch eine kleine Hubschrauberdrohne mit sich, die Erkundungsflüge auf dem Mars unternehmen soll:
Mars-Rover “Perseverance” und Hubschrauberdrohne “Ingenuity” [NASA/JPL-Caltec]
Übermorgen, am 30. Juli 2020 um 13:50 Uhr mittel-europäischer Zeit, soll es von Cape Canaveral losgehen. Auf die Landung und den ersten Einsatz des Rovers müssen wir noch etwas warten: das ist für den 18. Februar 2021 geplant.
Wie schon bei vorigen Missionen wie Mars Express, Dawn, MASCOT/Hayabusa2 und Philae/Rosetta hat auch diese Mission wieder deutsche Beteiligung an Bord: an der Verarbeitung der Bilder der Stereokamera Mastcam-Z sind Forscher des Berliner Deutschen Luft- und Raumfahrtzentrum (DLR) beteiligt. „Die beiden wissenschaftlichen Augen von Perseverance zur räumlichen Orientierung und mineralogischen Analyse befinden sich am ‚Kopf‘ des Rovers auf dem markanten Mast“, erklärt Frank Preusker vom DLR-Institut für Planetenforschung. Die im Kopf enthaltene Kamera kann mit maximalem Zoom bei einzelnen Aufnahmen Objekte von „der Größe einer Stubenfliege über die Länge eines Fußballfeldes hinweg sichtbar machen“. Insgesamt hat Perseverance sogar über 23 Kameras an Board, mehr als jede andere Mars-Mission bisher.
Zusammen werden die Kameras von Perseverance in der Lage sein, 360-Grad-Panoramen in 3D und in Farbe zu liefern. Auf die können wir uns also ab Februar 2021 freuen!
Schon seit längerem geplant und jetzt in Vorbereitung eines längeren Artikels endlich mal dazu gekommen: ein Interview mit Arne Maibaum von NotMyRobots über NotMyRobots.
Ich bin eigentlich nur mit einigen, wenigen Fragen ins Interview gegangen, rund um eine Kernfrage in Vorbereitung meines Artikels. Das Gespräch hat dann aber doch insgesamt fast eine Stunde gedauert und war extrem interessant. Es ging um den Terminator und Roboter, die uns die Jobs weg nehmen, aber auch um viele unerwartete Aspekte wie Sexismus, Rassismus und Epistemologie. Wie Arne Maibaum zum Ende des Gesprächs sagt: „Das kommt davon, wenn man mit SozialwissenschaftlerInnen redet.“ Hier also das ganze Interview:
Ich: Hallo, Arne! Für alle, die es noch nicht kennen: Was ist NotMyRobots überhaupt?
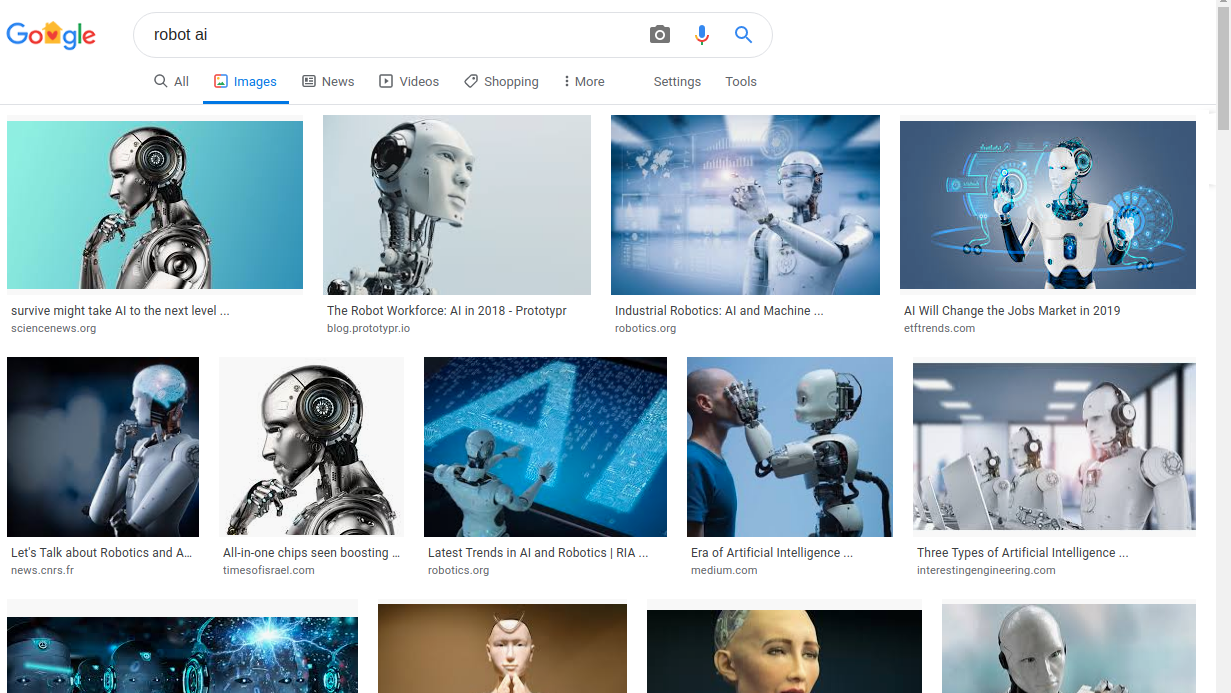
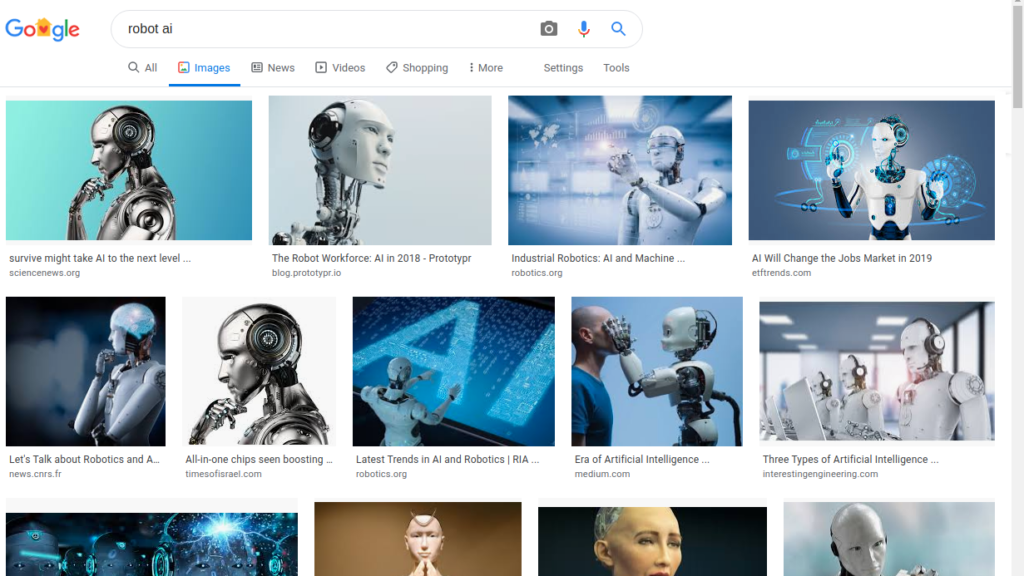
Arne Maibaum: Wir haben ja auch eine kleine Beschreibung in unserem Twitter-Profil und auf unserer Website. Vor allem auf Twitter haben wir gesehen, dass wahnsinnig viele ganz fürchterliche, unrealistische, aber vor allem auch tatsächlich falsche Visualisierungen für populärwissenschaftliche Robotik-Artikel benutzt werden. Allerdings teilweise auch in Teasern zu wissenschaftlichen Artikeln. Das sind unrealistische Bilder in Artikeln zu Robotern, aber auch – in letzter Zeit immer mehr – in Artikeln zu AI, die ja häufig auch mit Robotern bebildert werden.
‚Wir‘ sind dabei Philipp,Lisa, Laura und ich. Phillip und ich arbeiten bei einer Robotikgruppe an der TU Berlin. Laura und Lisa sind in München und arbeiten auch aus einer sozial- bzw. kultur-wissenschaftlichen Perspektive an dem Thema Robotik. Phillip und ich sind zwar beide Soziologen, sind aber in der Mensch-Roboter-Interaktion gelandet. Wir haben alle schon immer diese Bilder gesammelt. Das heißt, alle von uns hatten ohnehin schon so eine kleiner Galerie des Schreckens in der Hand. Lisa widmet sich außerdem in ihrer Arbeit dem Roboter in der Popkultur der Amerikanischen Geschichte. Das heißt, sie hat das auch in Ihrer Dissertation benutzen können.
Aus diesem Konglomerat haben wir uns dann überlegt, dass wir das in irgendeiner Weise publik kritisieren müssen. Als eine Maßnahme dafür haben wir den Twitter-Account @NotMyRobots gegründet, der versucht, auf Twitter aufzuzeigen, wenn diese Symbolbilder verwendet werden. Wenn uns jemand solche Bilder über den Hashtag #notmyrobot zuträgt, das machen mittlerweile ziemlich viele, re-tweeten und sammeln wir die. Je nach Bild versuchen wir auch mit eigenen kritischen Kommentaren aufzuzeigen, warum wir das nicht gut finden.
Wie sind die Leute auf Euch gekommen? Also wie ist das passiert, dass da jetzt mittlerweile so viele mithelfen?
Ich denke mal, viele Robotiker stört das ganz gewaltig. Ich glaube aber auch, gerade viele Leute, die aus den Humanwissenschaften kommen, sind da auch extrem sensibel für. Viele von denen haben solche Bilder auch vorher schon immer gesehen und den Kopf geschüttelt. Da ergibt sich dann eine gewisse Anzahl von Leuten, die dieses Problem auch sehen und denen unsere Initiative gefällt. Die nutzen dann unseren Hashtag oder taggen uns.
Das ist interessant. Mir fallen diese Bilder natürlich auch seit Jahren auf, mindestens seitdem ich selber in der Robotik bin. Ich rolle dann auch mit den Augen, habe aber nie wirklich reflektiert, dass das wirklich schädlich ist. Warum ist das denn so schlecht?
Also wovon wir immer ausgehen ist, dass Technik nicht aus dem leeren Raum kommt und Roboter nicht einfach so gebaut werden, wie es die Technik empfiehlt. Sondern, und das ist jetzt die soziologische Perspektive, Technik ist immer mensch-gemacht und immer sozial konstruiert. Als ein solches ist sie natürlich auch Aushandlungsprojekt davon, wie die Gesellschaft Robotik und Roboter sieht. In die Kommunikation darüber, wie so eine Technologie konstruiert wird, spielt natürlich Visualisierung eine große Rolle. Bei Pflegerobotern zum Beispiel sehen wir zwei Erwartungen, die stark mit Visualisierungen gekoppelt sind:
Als allererstes ist da immer der Terminator-Roboter, der aus irgendwelchen Gründen bei Robotik-Artikeln immer wieder auftaucht. Damit geht die Erwartung einher, dass zukünftige Roboter eiskalt sein werden und potentiell tödliche Maschinen sind, mit Metallgreifern, die nach uns greifen wollen. Das ist natürlich das Horrorszenario, das schürt Angst und führt dazu, dass Leute damit nichts mehr zu tun haben wollen.
Eines meiner liebsten Beispiele ist aus einem Projekt, in dem ich als Student tätig war. Wir hatten autonom fahrende Transportsysteme, die in Krankenhäusern zum Beispiel zum Transport von Wäschekisten eingesetzt wurden: der Casero-Roboter. Die sollten dann auf einer Bohrinsel eingesetzt werden, also bei Männern, die über viele Kilometer explosionsfähiges Material anbohren. Die haben sich aber strikt geweigert, einen solchen Roboter auf ihre Bohrinsel zu nehmen, weil sie Angst davor hatten, dass der sie alle umbringt. Dieses Bild kommt natürlich durchaus aus der Science-Fiction und dieser Angst, einer solchen Maschine ausgeliefert zu sein. Und wenn wir dann Artikel sehen, die so ein Bild unter ‚Roboter sollen uns helfen‘ setzen, ist das natürlich inhärent problematisch dafür, wie die Technik wahrgenommen wird. Das hat natürlich dann auch Einfluss auf Fördergelder usw.
Bei heise.de kommt man heute im Artikel zu Robotern gegen Corona-Krise zu dem Schluss: „[…] interessante Forschungen, die aber zugleich zeigen, dass die Technik von einer Einsatzreife noch weit entfernt ist. Tatsächlich hatten die Telepräsenzroboter […] eher experimentellen Charakter und mussten immer wieder manuell unterstützt werden, wenn sie sich irgendwo festgefahren hatten.“ Eine ähnlich ernüchternde Erkenntnis, wie wir sie zu Beginn unseres letzten Artikels zum Thema formuliert hatten.
In dem Artikel wird die aktuelle Pandemie allerdings auch als Chance für die Robotik diskutiert, daran etwas zu ändern: „Covid-19 könnte zum Katalysator werden, der die Entwicklung von Robotiksystemen vorantreibt“. Und weiter: „Es geht also offenbar darum, die Gunst der Stunde zu nutzen und Forschungsgelder einzuwerben. Das ist nachvollziehbar, schließlich werden weltweit von den Regierungen gerade große Geldmengen bereitgestellt.“ Aus Sicht der Robotikforschung sicher nachvollziehbar, allerdings ist mein Eindruck der letzten Jahre nicht, dass die Robotik unter mangelnden Forschungsgeldern leidet. Vielleicht sogar ganz im Gegenteil.
Als Antwort auf das Coronavirus werden, wie auch bei vielen Katastrophen zuvor, wieder Roboter als Wunderwaffe aus dem Hut gezaubert. Sie sind dieses Mal, anders als bei vorigen Katastrophen, allerdings auch tatsächlich schon im Einsatz und in Teilen nützlich. Besonders trifft das wohl auf Telepräsenzroboter zu.
Telepräsenzroboter
Telepräsenzroboter sind erstmal ein technisches Mittel, um direkten Mensch-zu-Mensch-Kontakt zu verhindern. Sie erlauben die Kommunikation über Distanz und verringern somit die Gefahr, Krankheiten zu übertragen. Das ist in einer Zeit, in der Social Distancing ausgerufen wird natürlich insgesamt nützlich, insbesondere allerdings in Krankenhäusern, wo es primär dem Schutz des medizinischen Personals dient.
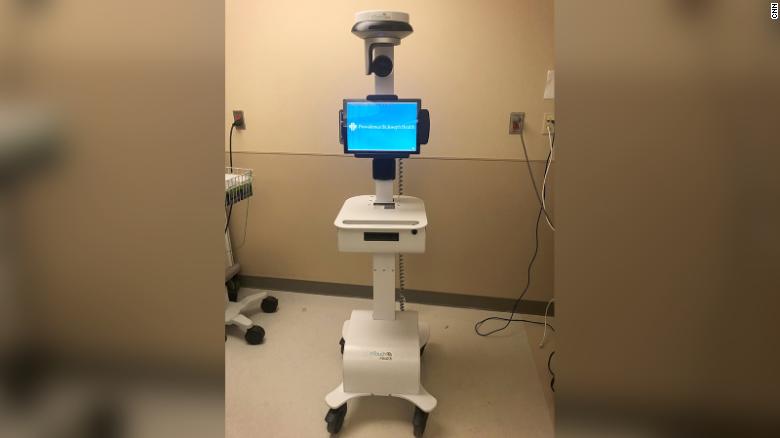
So wird in Seattle zum Beispiel der erste Coronavirus-Fall der USA, ein Mann aus Wuhan, weitestgehend mithilfe des unten abgebildeten Roboters behandelt. Diese Behandlungsmethode wurde eigentlich für MERS und Ebola erprobt, aber kurzerhand für die aktuelle Situation genutzt.
Telepräsenzroboter, der in Seattle bei der Behandlung eines COVID-19-Patienten eingesetzt wird. [CNN.com]
Mehrere Berichte aus China verweisen dort auf ähnliche Anwendungen. Ich würde mich außerdem nicht wundern, wenn auch die aktuell dramatisch gesteigerte Arbeit von zu Hause (Home Office) und die dadurch notwendig gewordenen Videokonferenzen die Verkaufszahlen der zahlreichen Telepräsenzroboter erhöhen. Das werden wir wohl in einigen Monaten sehen können.
Lieferroboter
Aus China sind außerdem Bilder und Videos von selbstfahrenden Lieferroboternzu sehen, die in Hotels als auch in Krankenhäusern Medikamente und Essen liefern. Wie zum Beispiel im nachfolgenden Tweet samt Video zu sehen:
JD.com liefert in China mittels autonomer Lieferroboter medizinische Hilfsgüter an Krankenhäuser und Lebensmittel. Die Alibaba-Tochter Ele.me, beliefert unter anderem Hotels per Lieferroboter mit Lebensmitteln.
Roboter des dänischen Unternehmens UVD Robots aus Odense desinfiziert einen Raum
Ähnliche Roboter gibt es mehrere. Ein ähnlicher Roboter der Firma Xenex Disinfection Services ist angeblich bereits in über 500 Krankenhäusern weltweit im Einsatz, unter Anderem in den USA. Mit Siemens mischt auch eine deutsche Firma mit. Der Roboter aus dem folgenden Video, Thor-1, kann angeblich zehntausend Quadratmeter in einer Stunde desinfizieren und kommt laut Spiegel mittlerweile rund um die Uhr in mehreren Kliniken zum Einsatz:
Der Roboter Thor-1 desinfiziert Städte und Kliniken
Nach dem bei vorigen Katastrophen die Robotik an ihren eigenen geweckten Erwartungen gescheitert ist und eben nicht helfen konnte, wäre es schön, wenn Robotik bei der aktuellen Pandemie tatsächlich einen positiven Beitrag leisten könnte. Viele der Bilder und Videos sind allerdings aktuell noch vorbehaltlich und mit Vorsicht zu genießen, da es sich auch weiterhin um Marketing handeln kann, wie zum Beispiel der WDR anmerkt.
Der Name ist bekannt! Geworden ist es: Perseverance (Ausdauer, Beharrlichkeit).
Bei dem Wettbewerb zum Namen des Marsroboters haben über 770.000 Abstimende mitgemacht. Gewonnen hat schließlich der Aufsatz des Siebtklässlers Alex Mather aus Springfield, Virginia, der 28.000 Stimmen erhielt:
Curiosity. InSight. Spirit. Opportunity. If you think about it, all of these names of past Mars rovers are qualities we possess as humans. We are always curious, and seek opportunity. We have the spirit and insight to explore the Moon, Mars, and beyond. But, if rovers are to be the qualities of us as a race, we missed the most important thing. Perseverance. We as humans evolved as creatures who could learn to adapt to any situation, no matter how harsh. We are a species of explorers, and we will meet many setbacks on the way to Mars. However, we can persevere. We, not as a nation but as humans, will not give up. The human race will always persevere into the future.
Alexander Mather
Schwer pathetisch, aber das kennt man ja aus Hollywood.
Seit Freitag bin ich zurück vom European Robotics Forum 2020. Auf dem Hinweg hatte ich noch gerätselt, ob wohl die Auswirkungen des Coronavirus‘ zu bemerken sein würden. Jetzt kann ich sagen: ja, waren sie. Corona war gefühlt neben der Strategic Research Agenda für das kommende ForschungsrahmenprogrammHorizon Europe und künstlicher Intelligenz das vorherrschende Thema.
Direkt zu Beginn wurde erstens klar, dass die EU-Kommission wegen Reisebeschränkungen ausnahmsweise dem ERF komplett fernbleiben würde. Zweitens galt während des gesamten Events striktes Handschüttelverbot (das wird uns in nächster Zeit wohl noch häufiger begegnen). Und drittens wurden jeden Tag am Eingang des Veranstaltungsortes bei allen Teilnehmern die Temperatur gemessen. Ob wirklich jemand nach Hause geschickt wurde, weiß ich nicht, die Atmosphäre hat es aber natürlich trotzdem beeinflusst. Mein Husten und Schnupfen wurde während der Veranstaltung auch regelmäßig äußerst skeptisch beäugt.
Händeschütteln verboten beim ERF 2020
Exhibition
Die Ausstellungsfläche, auf der beim ERF traditionell in den Mittags- und Kaffee-Pausen Roboter und Robotikprojekte gezeigt werden, war auch dementsprechend ausgedünnt. Unter Anderem fehlte der Hauptsponsor des Events, ABB. ABB hätte dort sonst wahrscheinlich einen größeren Stand mit mehreren Robotern gezeigt.
Viele offene Flächen, wo eigentlich Roboter stehen sollten
Unserem Stand, vom micro-ROS-Projekt, tat dieser Umstand allerdings keinen Abbruch. Wir hatten über alle Tage viele interessierte Besucher, die unsere Demo gesehen und mit uns über ROS auf Mikrocontrollern diskutiert haben. Überraschenderweise schienen die Besucher des ERF ähnlich viele Unklarheiten und Fragen zu dem – theoretisch verbreiteten und schon über zwei Jahre alten – ROS-Nachfolger ‚ROS 2‚ zu haben wie zu unserem vergleichsweise kleinen Projekt. Da hat ROS 2 wohl noch Nachholbedarf in der Dokumentation und Kommunikation.
Viel Diskussion am micro-ROS-Stand
Workshops
Abseits der Ausstellungsfläche haben in den Workshops meinem Eindruck nach zwei Themen dominiert: künstliche Intelligenz (AI) und die Strategic Research and Innovation Agenda (SRIA) für Horizon Europe. Dies betrifft zumindest die Workshops, die auch tatsächlich stattgefunden haben. Mehrere der ursprünglich geplanten Workshops und Vorträge fielen nämlich aus oder wurden spontan von anderen Teilnehmern vertreten.
Die SRIA war so präsent, da sie beeinflusst, zu welchen Themen die EU-Kommission in den Jahren 2021–2027 ca. 100 Milliarden Euro Forschungsgelder zur Verfügung stellen wird (nicht ausschließlich für die Robotik, selbstverständlich). Dass AI so im Fokus des ERF stand liegt daran, wie die EU-Kommission das Verhältnis von AI und Robotik sieht bzw. – besser gesagt – definiert. Sie hat nämlich erklärt, dass sie Robotikals Teil von AI versteht und nur in dem Rahmen fördern wird. Die Robotik-Community sieht das natürlich anders, nämlich dass AI und Robotik zwei separate Disziplinen mit einigen Überschneidung sind. Will man sich allerdings mit der EU-Kommission vertragen, muss man diese Sichtweise zähneknirschend tolerieren.
In diesem Rahmen habe ich während der Veranstaltung auch gelernt, dass ich in diesem Jahr wohl noch ein bis zwei Male in Brüssel sein werde. Als Koordinatoren einer der euRobotics-Topicgroups werde ich dort wohl am Input für die SRIA mitarbeiten. Wahrscheinlich geht’s damit schon im Mai los.
Abseits davon hat mich persönlich gefreut, dass auch das Thema Sicherheit (sowohl im Sinne von Safety als auch von Security) beim ERF präsenter wird. So habe ich drei gute Workshops zum Thema Safety besucht, unter anderem in der Industrierobotik, in dem ich auch selbst vorgetragen habe. Ich hoffe, das bleibt so, denn dieses Thema schien mir in den letzten Jahren bei euRobotics deutlich unterrepräsentiert.
Insgesamt also ein ausgedünntes European Robotics Forum in diesem Jahr, mit trotzdem einigen interessanten Themen, aber leider wenigen Robotern. Im nächsten Jahr hoffentlich dann wieder mit vollem Schwung, dann geht’s zum ERF 2021 nach Rotterdam!
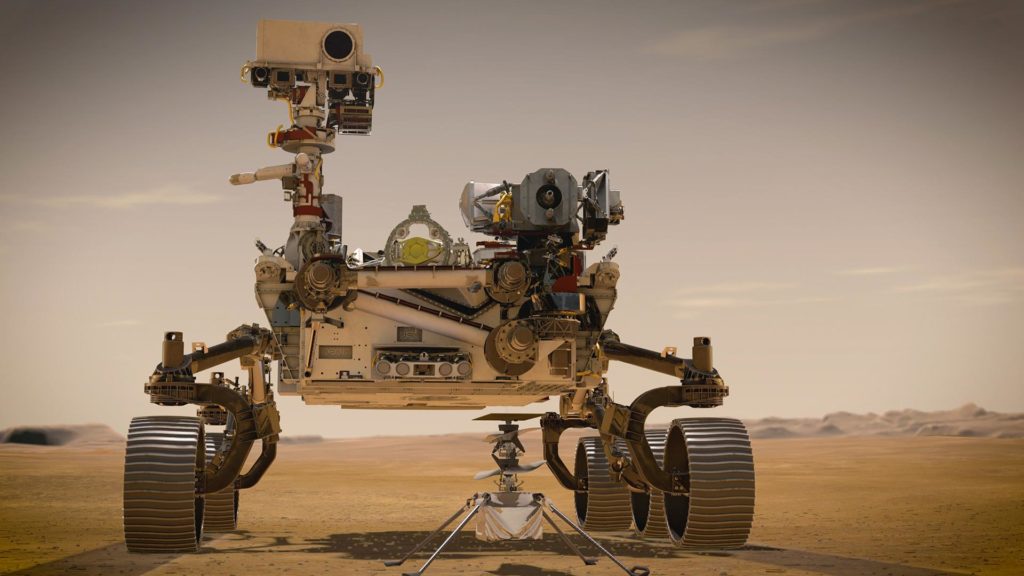
Noch für gut einen Tag (zum Zeitpunkt des Schreibens 1 Tag und gute 9 Stunden) darf man bei der NASA über den Namen des Mars-Roboters für die Mission Mars2020 abstimmen. Zur Auswahl stehen die Namen TENACITY (Beharrlichkeit), CLARITY (Klarheit), INGENUITY (Einfallsreichtum), PROMISE (Versprechen), FORTITUDE (Tapferkeit), VISION, PERSEVERANCE (Ausdauer), ENDURANCE (Ausdauer) und COURAGE (Tapferkeit). Hier geht’s zur Abstimmung!
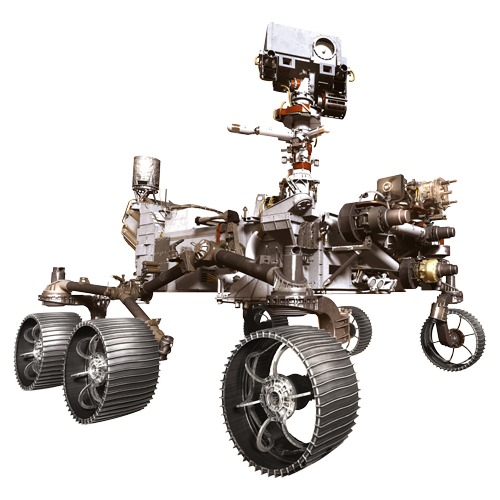
Der Roboter soll zwischen dem 17. Juli und 5. August 2020 von der Cape Canaveral Air Force Station in Florida starten und voraussichtlich am 18. Februar 2021 im Jezero Crater auf dem Mars landen. Vorausgesehen ist eine Missionsdauer von mindestens einem Mars-Jahr (ungefähr 687 Tage auf der Erde). Und so sieht er aus:
Mars-Roboter für Mars 2020 [Quelle: NASA]
Ich denke, ich muss Euch nicht sagen, dass es nur eine offensichtlich richtige Antwort gibt.







![[Quelle]](https://commons.wikimedia.org/wiki/File:HAL9000.svg){kind=link}