Arne Nordmann ist von Kindesbeinen an Robotik-Fan und hat sich deswegen im Dezember 2008 entschlossen, seine Begeisterung in Form eines Blogs zu teilen. Er hat Elektrotechnik an der TU Dortmund studiert und an der Universität Bielefeld in der Robotik promoviert. Seit 2015 arbeitet er bei Bosch in der Forschung an der modell-getriebenen Entwicklung komplexer, software-lastiger Systeme wie z.B. Roboter und hoch-automatisierte Fahrzeuge.
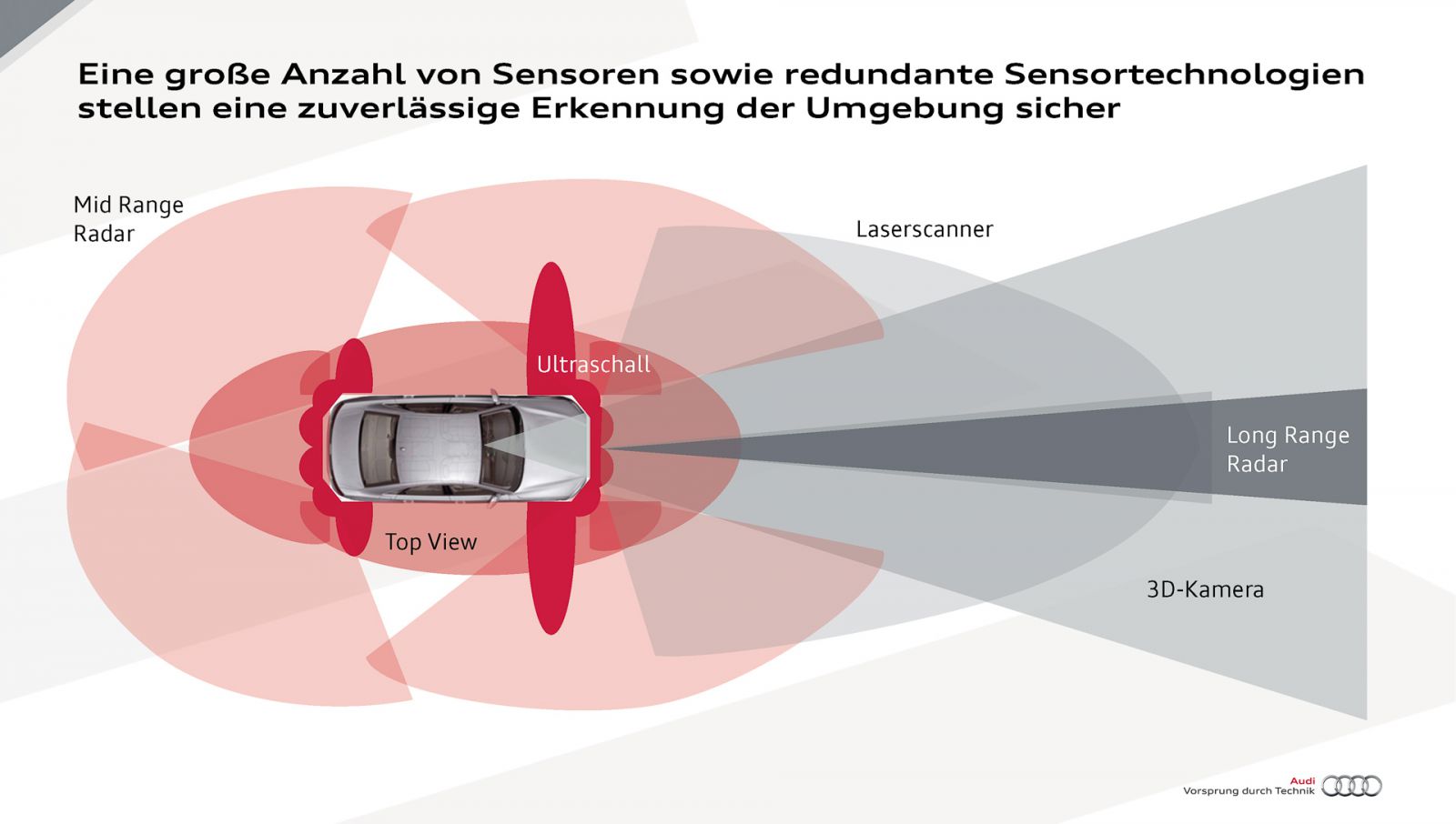
Drüben bei mobilegeeks.de hat Autoblogger Jan Gleitsmann seine Erfahrungen einer Probefahrt mit einem pilotierten Fahrzeug auf der Autobahn aufgeschrieben. Er berichtet von seinem Selbstversuch, mit dem Audi A7 „Jack“ pilotiert auf der Autobahn zu fahren und ist begeistert.
Herausgekommen ist ein unterhaltsames, lesenswertes, weil auch umfangreiches Stück, was über den aktuellen Stand aufklärt und über einige feine aber wichtige Unterschiede zwischen Fahrerassistenz, pilotiertem Fahren und autonomen Fahren hinweist. Lesenswert!
Eine mittlerweile beliebte Frage auf Messen und Konferenzen, auf denen Hersteller der neuen Generation kollaborativer Roboter als praxistauglich preisen ist: Wie viele eurer Roboter setzt ihr denn selbst bei der Herstellung eurer eigenen Roboter ein?
Die Antwort war bislang in aller Regel ernüchternd: Der KUKA iiwa wird handgefertigt, Baxter habe ich bislang nicht viel mehr als das Aufheben von Objekten machen sehen (und Rodney Brooks musste die Frage auf einer Konferenz auch verneinen), und meine diesbezügliche Frage beim Bosch APAS wurde auch zögerlich bis ausweichend beantwortet.
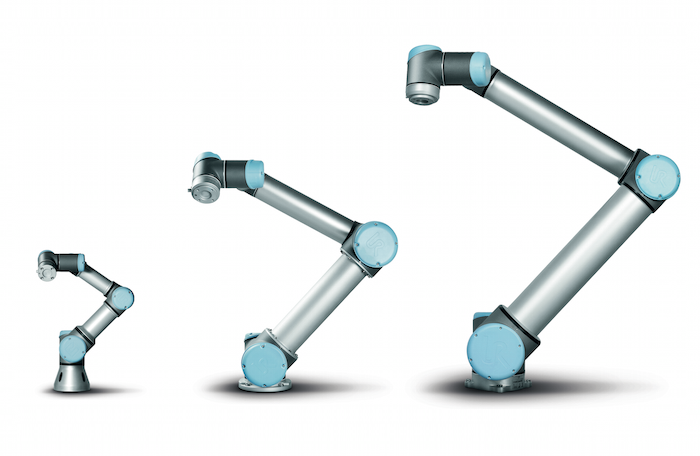
Der dänische Roboterbauer Universal Robots, das seit einigen Jahren mit günstigen und kraftgeregelten Leichtbaurobotern den internationalen Robotermarkt aufräumt, scheint das nun zu ändern. Der neu vorgestellte Universal Robots UR3 ist genau für Fertigungsarbeiten und Werkstattaufgaben gemacht und wird daher Universal Robots eingesetzt, um Kopien von sich selbst herzustellen 1 :
“Our robots are indeed helping to build our robots.” — Esben Østergaard, CTO und Mitgründer von Universal Robots
So sollte es sein. Wenn sie stimmt, gibt mir diese Aussage Vertrauen in die Praxistauglichkeit des Roboters. Und umgekehrt: Wenn der Hersteller seine Produkte selbst nicht einsetzt, warum sollte ich glauben, dass sie mir helfen können?
tl;dr: Der neue Universal Robots UR3 wird von Universal Robots beim Bau seiner eigenen Kopien eingesetzt. Und das ist gut so!
Die Universal Robots UR10, UR5 (von rechts) und links der neue kleine UR3.
Google zeigt mit Wucht, dass es sein Engagement in der Robotik offenbar ernst meint. Gestern wurde bekannt, dass Google als achte Robotikfirma innerhalb kürzester Zeit nun auch Boston Dynamics gekauft hat.
Boston Dynamics hat in den letzten Jahren durch fulminante Robotervideos auf sich aufmerksam gemacht, die eine Bewegungsdynamik zeigen, die bis dahin weitestgehend unbekannt war. Eines der beeindruckensten Videos war und ist wahrscheinlich nach wie vor eines der ersten vom BigDog:
Eines der frühen Videos von BigDog mit beeindruckender Stabilität
Dieses Video hat mich beim ersten Mal schockiert. Insbesondere die Szene ab Minute 0:52, bei der BigDog auf Eis ausgleitet. Ich sah ein Robotervideo und mein Hirn signalisierte in dieser Szene, dass es auf ein lebendiges Tier blickt und war einigermaßen verwirrt.
Dass Boston Dynamics diese Kompetenzen auch auf humanoide Robotik übertragen hat, macht es nicht weniger beeindruckend bzw. (je nach Perspektive) beängstigend:
PetMan
Eine Suche nach Boston Dynamics (insbesondere Youtube) fördert noch viele weitere beeindruckende Videos zutage, etwa neue Vierbeiner-Videos von Boston Dynamics WildCat:
WildCat
Nun ist es so, dass Boston Dynamics bislang primär via DARPA vom Militär gefördert war und man daher keine zuverlässigen Informationen über die Technik hinter diesen Videos und die Reproduzierbarkeit der gezeigten Fähigkeiten bekommt. Es gibt Hinweise darauf, dass einzelne Szenen der beeindruckensten Videos von Boston Dynamics gegebenenfalls eher selten / einmalig so gut aussehen und so gut funktionieren.
Mit Googles Engagement ist aber auch hier die Hoffnung, dass Boston Dynamics Schritt für Schritt weniger vom Militär abhängen wird und daher auch mehr Informationen zur Technik und der Reproduzierbarkeit der Experimente publizieren darf. Für die Robotik-Szene wäre das sicherlich ein enormer Gewinn.
Google executives said the company would honor existing military contracts, but that it did not plan to move toward becoming a military contractor on its own.
Das klingt für mich nach einer etwas verklausulierten Aussage, dass Google zwar bestehende Verträge mit dem Militär noch erfüllen will (muss), Boston Dynamics aber sukzessive aus der Milotärrobotik zurückziehen will.
Gestern gab es einen Paukenschlag in der Robotik: Google gab bekannt, man habe sieben Robotikfirmen gekauft und habe vor, in Zukunft in Robotik zu investieren. Mit Meka Robotics and Redwood Robotics zum Beispiel hat man zwei nicht ganz unbekannte Firmen der Robotik gekauft, die sich auf humanoide Roboter und Arme spezialisieren.
Das ist insofern ein Paukenschlag, als die Robotik bislang eigentlich nur in der Industrierobotik, (Nachtrag: der Medizinrobotik) und dem Militär einen wirklich kräftigen Markt hat. Die Servicerobotik ist noch großteils von Forschung, Prototypen und nur vereinzelt kommerziell erfolgreichen Robotern wie dem Roomba, Poolreinigungsrobotern o. Ä. bestimmt.
Dass ein Unternehmen wie Google nun diesen Markt angreift (vorerst nur als moonshot-Projekt, also ein eher visionäres Unterfangen), könnte der Robotik in diesem Bereich gehörigen Schub geben. Mit Googles selbstfahrendem Auto haben sie schließlich schon gezeigt, dass sie auf diesem Feld durchaus zu ernsthaften Entwicklungen willens und in der Lage sind:
Googles selbstfahrendes Auto gibt Gas
Und mit dem initialen Kauf von sieben Robotik-Unternehmen und dem ehemaligen Android-Chef Andy Rubin an der Spitze zeigt Google, dass sie es durchaus ernst meinen.
Ich bin gespannt, was da noch kommt. Ob dies die Robotiklandschaft (also die Servicerobotik, abseits der Industrie- und Militärrobotik) verändern kann/wird?
Der Oncilla ist verpackt und fertig für die Rückreise. Eingepackt in einem wasser- und stoßfesten Koffer, gemütlich in maßgeschneiderter Schamstoffeinfassung.
Gestern habe ich mich mit einem leeren speziellen Transportkoffer auf den Weg nach Lausanne in die Schweiz gemacht, um einen neuen Roboter abzuholen und nach Bielefeld zu bringen. Noch ist der Koffer leer, aber für den Rückweg wird mir das BioRob Lab der EPFL in Lausanne einen nagelneuen Oncilla in den Koffer legen. Gerne geben sie den selbstverständlich nicht her, aber so will es das AMARSi-Projekt. Und ich auch.
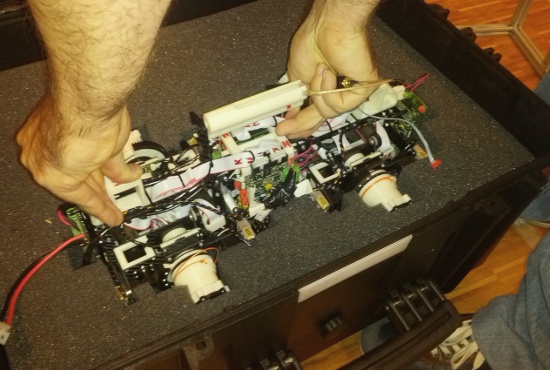
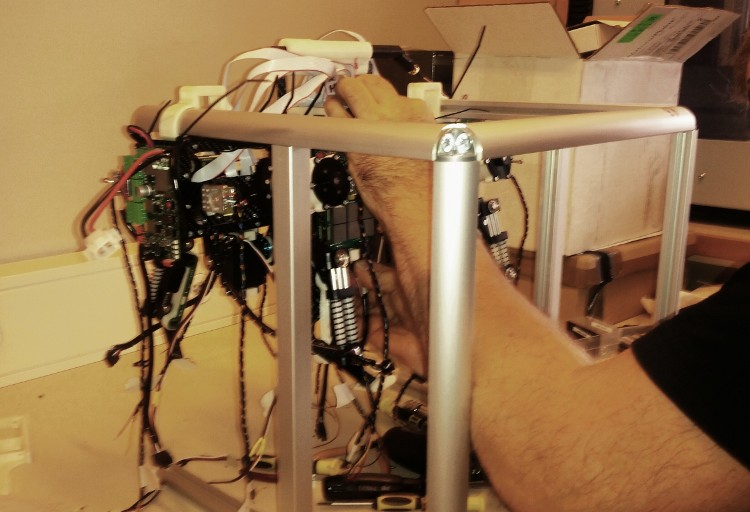
Hier der aktuelle Zustand des Oncilla-Roboters von heut morgen, noch auf dem Ständer und (noch) mit losen Kabelsträngen. Bis morgen ist Peter (im Bild) noch mit der finalen Verkabelung beschäftigt:
Oncilla-Roboter noch auf dem Ständer und mit (noch) losen Kabelsträngen
Hier ist ein Video der ersten Gehversuche (bzw. Trab-Versuche) eines Oncilla-Zwillings, das das Reservoir Lab aus Gent Anfang des Jahres gemacht hat:
Erste Gehversuche mit dem Oncilla (Trab)
Ich hole den Roboter persönlich ab, um gleichzeitig auch eine Einführung in die Hardware zu bekommen. Da ich selbst hauptsächlich mit Software arbeite, bin ich in Hardware-Fragen weitgehend unerfahren und benötige dringend einen Crash-Kurs in Inbetriebnahme und Wartung von Vierbeinern, damit ich unseren Oncilla nicht direkt bei den ersten Experimenten zerlege.
Gleichzeitig werden wir auch die Zeit nutzen, ein bisschen an der Control-Software zu hacken, was direkt vor Ort mit den Oncilla-Erschaffern einfacher ist als über größere Distanz. Ziel ist eine einfache API zu entwickeln, da Software und Hardware des Roboters (inklusive Simulator) in naher Zukunft vollständig Open Source sein sollen.
Am Donnerstag geht’s dann samt Roboter im Gepäck zurück zum CoR-Lab nach Bielefeld, der Spezialkoffer mit den Schaumstoffeinlagen verhindert dabei hoffentlich sämtliche Beschädigungen.
Und dann wartet die eigentliche Arbeit: dem Oncilla neue Tricks beizubringen!
Wer hat sich nicht schon einmal einen Roboter gewünscht, der im Haushalt hilft? Der zum Beispiel schon einmal den Kuchenteig anrührt, knetet und ausrollt, während man selbst die Glasur vorbereitet, bzw. einem das lästige Gemüseschnibbeln beim Kochen abnimmt. Oder einen kleinen Roboterassistenten, der einem bei heimischen Bastelarbeiten die richtigen Werkzeuge anreicht, wie man es aus OP-Sälen in Krankenhäusern kennt: „Roboter, Schraubenzieher!“ – „Schraubenzieher, und weiter?“ – „Schraubenzieher, bitte!“
Die Vision: Roboter und Mensch arbeiten zusammen [johanneswienke.de]
Zumindest in Industrieszenarien ist das keine allzu weit entfernte Zukunftsvision mehr. Flexibel anpassbare Roboter, die autonom oder Hand in Hand mit dem Menschen in einer Werkstatt oder Produktionsstrasse arbeiten und diesen bei Fertigungsaufgaben unterstützen, sind schon seit geraumer Zeit ein strategisches Anliegen europäischer Wissenschaftler und der Robotikindustrie. So führt bereits die im Jahr 2009 ausgerufene europäische Strategic Research Agenda diese beiden Szenarien, den „Robotic Worker“ und den „Robotic Co-Worker“, als Kernanwendungsszenarien zukünftiger Industrierobotik mit auf. Dabei geht es nicht um Großserien-Vollautomatisierung wie man sie z. B. aus der Automobilindustrie kennt, in der Roboter an Roboter aufgereiht in Käfigen und – aus Sicherheitsgründen – abgeschottet vom Menschen monatelang exakt die gleiche Aufgabe ausführen:
Vollautmatisierte Montage von Automobilen bei KIA
Es geht vielmehr um die Unterstützung von Mitarbeitern in kleinen und mittelständischen Unternehmen, deren Auftragslage sich relativ schnell ändern kann. Denkbar ist die Fertigung von Prototypen, von denen häufig nur geringe, einstellige Stückzahlen gefertigt werden. In diesem Kontext sind zur Zeit Handarbeitsplätze immer noch die Regel, d. h. Fachkräfte montieren und bearbeiten Bauteile bzw. bestücken und entladen Maschinen manuell. Häufig sind diese Arbeiten verbunden mit anstrengender körperlicher Arbeit.
Eine Vollautomatisierung im klassischen Sinne, also mit Robotern, die genau auf diesen einen Zweck ausgelegt sind und in aller Regel nicht oder nur sehr aufwendig an neue Fertigungsaufgaben angepasst werden können, macht hier allein schon aus ökonomischen Gründen keinen Sinn. Der durch die Einsparung einer Fachkraft gewonnene finanzielle Vorteil wird sofort wieder zunichte gemacht durch den notwendigen, häufigen und kostenintensiven Einsatz von Experten, die den Roboter bei jeder Änderung im Produktionsablauf wieder an seine neue Aufgabe anpassen und umprogrammieren müssen. Zusätzlich sind viele Teilaufgaben in solchen Fertigungsprozessen sehr komplex und wenn überhaupt nur mit enorm hohem technischen Aufwand automatisch zu bewerkstelligen, wie z. B. der berühmte Griff in die Kiste.
Die Idee ist vielmehr, den Menschen zu unterstützen, indem man ihm diejenigen Arbeiten überlässt, die er z. B. auf Grund besserer visueller Wahrnehmung und guten Fingerfertigkeiten kompetenter und schneller durchführen kann als jede Maschine, ihn aber durch den Roboterassistenten von körperlich belastenden Arbeiten zu befreien … der Roboter als dritte Hand. Damit jedoch beide, Roboter und Mensch, an einem Arbeitsplatz gemeinsam sinnvoll zusammenarbeiten können, sind einige Herausforderungen zu bewältigen. Ein bisschen Buzzword-Bingo:
Flexibilität: Um sich den ständig wechselnden Aufgaben anpassen zu können und in beliebigen (engen, eingeschränkten) Arbeitsräumen mit dem Menschen zusammen zu arbeiten, ist im Vergleich zu herkömmlichen Industrierobotern zusätzliche Flexibilität nötig. Diese erhält man z. B. durch zusätzliche Bewegungsachsen: übliche Industrieroboter verfügen über bis zu sechs Achsen, ab sieben Achsen erhält man durch Redundanz zusätzliche Flexibilität.
Interaktion: Um teures und zeitaufwendiges Umprogrammieren der Roboter durch Experten zu umgehen, muss der Mitarbeiter vor Ort in der Lage sein, durch einfache, direkte Interaktion den Roboter an seine neuen Aufgaben und Arbeitsbedingungen anzupassen und ihn den eigenen Bedürfnissen entsprechend zu programmieren. Sicherheit: Die direkte physische Kooperation zwischen Mensch und Maschine erfordert andere Sicherheitsmechanismen als Zäune und strikte Arbeitsraumtrennung, um die Sicherheit für den Menschen dennoch zu gewährleisten.
Technisch gesehen scheinen obige Herausforderungen so gut wie gelöst. Der vom Deutschen Luft- und Raumfahrtszentrum und KUKA gemeinsam entwickelten Leichtbauroboter IV (LBR IV), dessen serienreifer Nachfolger KUKA LBR iiwa auf der diesjährigen Hannover Messe erstmals vorgestellt wurde, ist ein Beispiel. Das geringe Gewicht, Kraftsensoren zur Kollisionserkennung und eine sehr schnelle Regelung sind gute Voraussetzungen für eine sichere Interaktion mit dem Menschen. Außerdem ist der LBR mit seinen sieben Bewegungsachsen redundant, bietet also genügend Flexibilität, um um Hindernisse herumzugreifen oder Aufgaben auf mehr als nur eine Art zu erledigen.
Dass trotzdem nun nicht jeder sofort einem solchen Roboter Aufgaben beibringen kann, sieht man im folgenden Video, welches im Verlaufe einer umfangreichen Feldstudie 2 mit Mitarbeitern der Firma Harting entstand:
https://youtube.com/watch?v=tRTfSWBbE1QAuch moderne Roboter sind nicht leicht zu bedienen.
Die Aufgabe für die Probanden bestand im Prinzip aus einer Art Heißer-Draht-Spiel: Der vorn am Roboter montierte Greifer sollte möglichst genau an dem Styropor-Parcours entlang geführt werden, währenddessen natürlich jede Kollision sowohl vorne am Greifer als auch am Rest des Roboterkörpers mit den Umgebungsobjekten vermieden werden sollte. Der Hintergrund: Genau durch diese Art des Führens (englisch: Kinesthetic Teaching) können dem Roboter Aufgaben beigebracht werden. Die in der Interaktion entstandenen Bewegungen werden aufgezeichnet und können auf Befehl schneller, langsamer oder leicht verändert wieder abgespielt werden. Der Fachbegriff hierfür lautet Teach-In und bezeichnet das aktuell übliche Verfahren, um Roboter „anzulernen“.
Wie man in dem Video sieht, geht das zum Teil gehörig schief! Die Versuchspersonen scheinen (trotz einer vorherigen Eingewöhungsphase mit dem Roboter) überfordert von der Aufgabe, dem LBR den Parcours kollisionsfrei beizubringen. Das liegt nicht an der Komplexität der Aufgabe: Eine einfache vorgegebene dreidimensionale Bewegung wie die des Parcours aus der Studie nachzufahren, ist für uns Menschen typischerweise zu bewältigen und wie wir später sehen werden auch in Verbindung mit einem Roboter leicht möglich. Der Grund ist die durch jahrelange Ingenieurskunst geschaffene, komplizierte Technik des LBR, die technische Vorteile, aber auch erhöhte Komplexität mit sich bringt. Denn hinter dem einen „I“ des Wortes „Interaktion“ verstecken sich noch zwei weitere: intuitiv und intelligent. Einem Roboterarm mit sieben Gelenken eine bestimmte dreidimensionale Bewegung beizubringen und dabei gleichzeitig darauf achten zu müssen, dass er mit seinen sieben Achsen nicht mit Hindernissen im Arbeitsraum kollidiert, ist nicht intuitiv. Und eine vorgemachte Bewegung abspeichern und wieder abspielen zu können, ist nicht sonderlich intelligent.
Dieses Beispiel zeigt, dass in der Praxis mehr notwendig ist als nur die technischen Möglichkeiten zu schaffen. Der Schlüssel, davon sind wir überzeugt, liegt in einer systematischen Integration von Hochtechnologie, maschinellem Lernen und einfacher Interaktion. Um ein solches Robotiksystem für den Arbeiter vor Ort bedienbar zu machen, muss die eigentliche technologische Komplexität im besten Fall hinter intuitiven Benutzerschnittstellen und schrittweiser Interaktion versteckt werden. Am Forschungsinstitut für Kognition und Robotik (CoR-Lab) der Universität Bielefeld beschäftigen wir uns seit Jahren genau damit. Das Robotersystem, das oben im Video zu sehen war und auf einem KUKA LBR IV aufbaut, ist unsere Forschungsplattform FlexIRob: ein Beispielszenario, bei dem wir diese Art von Integration untersuchen. Um die obige Aufgabe zu erleichtern, haben wir einen Ansatz entwickelt, mit dem jeder einen solchen Roboter an neue Umgebungen und Aufgaben anpassen kann. Die Idee ist im Prinzip einfach und beruht darauf, die komplexe Aufgabe in zwei Teilschritte zu unterteilen. Dass das funktioniert, ist im folgenden Video zu sehen:
Erleichterung der Interaktion durch Aufteilung in explizite Konfigurations- und assistierte Programmierphase (ab ca 1:15)
Der erste Teilschritt der Aufgabe heißt Konfigurationsphase und ist unabhängig von der Aufgabe, die der Roboterarm später ausführen soll. In dieser Phase bringt der Nutzer bzw. der Mitarbeiter dem Roboter seine neue Umgebung bei, d. h. eventuelle dauerhafte Hindernisse, welche in seinem Arbeitsbereich platziert sind, wie z. B. herumliegende Objekte, Säulen oder Regale. Als Mensch hat er dabei ein intuitives Verständnis der Szenerie: Er sieht die Hindernisse, er weiß, dass und wie man um sie herumgreifen muss und ist deswegen instinktiv in der Lage, den LBR dabei in ausgesuchte Regionen zu führen und dort mit ihm zusammen einige Beispielbewegungen durchzuführen, ohne mit den Hindernissen zu kollidieren. Von diesen Beispielbewegungen kann nun der Roboterarm lernen, wie er sich in seinem Arbeitsbereich zu bewegen und wie er die Hindernisse im Zweifel zu umgreifen hat. Die Methoden zum Lernen, die dabei verwendet werden, gehen über simples Aufnehmen und Reproduzieren hinaus. Mit Hilfe von künstlichen neuronalen Netzen ist das System nämlich nicht nur in der Lage sich innerhalb der trainierten Bereiche zu bewegen, sondern auch zwischen diesen hin- und her zu manövrieren und kollisionsfreie Bewegungen für den Arm zu wählen. Diese Eigenschaft von Lernverfahren nennt man Generalisierungsfähigkeit und beschreibt die Fähigkeit, von wenigen Beispieldaten ein generelles Verhalten zu erlernen und dieses auf unbekannte Daten zu übertragen. In unserem Fall sind die Beispieldaten die Trainingsdaten, welche vom Nutzer zur Verfügung gestellt werden und im Video als grüne Punkte dargestell sind. Von diesen lernt der Roboter innerhalb weniger Minuten, beliebige Zielpositionen anzufahren, ohne dabei mit den Hindernissen zu kollidieren. Und das nicht nur in den Trainingsbereichen, sondern auch darüber hinaus 3.
Im nächsten Schritt, geht es nun darum, ihm die eigentliche Aufgabe beizubringen. Das kann z. B. eine Schweiß- oder Klebenaht sein und auf verschiedenen Wegen passieren, z. B. erneut mit Hilfe von Kinesthetic Teaching, also dem direkten Führen des Roboters. Da dieser sich aber in seiner Umgebung nun schon zu bewegen weiß, braucht der Nutzer nicht mehr alle Gelenke gleichzeitig zu kontrollieren. Es reicht, dass er ihn vorn am Greifer entlang der spezifischen Aufgabe führt und der Roboter assistiert ihm dabei sozusagen bei der Hindernisvermeidung, wie in dem Video ab Minute 2:10 zu sehen ist. Diese Phase nennen wir deshalb Assisted Programming.
Der Knackpunkt zur Vereinfachung dieser Interaktion liegt also in der Aufteilung der Gesamtaufgabe in zwei oder mehr aufeinander aufbauende Teilschritte, um den Nutzer bzw. Mitarbeiter des Roboters nicht zu überfordern. Im letzten Jahr haben wir mit Unterstützung der Firma Harting oben genannte Pilotstudie zum Thema Kinesthetic Teaching durchgeführt und die beschriebene Idee evaluiert. Dabei haben 48 Mitarbeiter, unterteilt in zwei Versuchsgruppen, mit dem System interagiert und versucht, dem Roboter obigen Parcours beizubringen. Die Ergebnisse der einen Gruppe waren bereits im ersten Video zu sehen. Von 24 Versuchsteilnehmern, haben es gerade einmal zwei Probanden geschafft, den Parcours kollisionsfrei abzufahren; eine Probandin brach ihren Versuch nach einiger Zeit frustriert ab. Die zweite Versuchsgruppe hingegen benutzte den assistierten Modus und zeigte signifikant bessere Ergebnisse. Diese Teilnehmer benötigten im Schnitt weniger als die Hälfte der Zeit, um den Roboter anzulernen, die beigebrachten Bewegungen waren signifikant näher an der Vorgabe und wesentlich ruckelfreier.
Unsere Experimente und Studien legen nahe, dass moderne Robotiksysteme durchaus über die Flexibilität verfügen, regelmäßig und vor Ort an wechselnde Aufgaben angepasst zu werden, wie es zum Beispiel für Kleinserienfertigung oder Prototypenbau notwendig ist. Dazu reicht die rein technische Flexibilität allerdings nicht aus, denn sie erfordert immer noch lange Einarbeitung und Robotikexperten. Erst in der Kombination mit lernenden Systemen und einfachen Interaktionsschnittstellen spielen solche Systeme ihr volles Potential aus.
Christian Emmerich und Arne Nordmannsind Doktoranden am Forschungsinstitut für Kognition und Robotik der Universität Bielefeld und beschäftigen sich mit lernenden, interaktiven Robotiksystemen.
So, es ist soweit, nach drei Jahren verlasse ich im mein bisheriges Büro im Hauptgebäude der Universität Bielefeld und ziehe etwa einen knappen Kilometer weiter auf den neuen Campus der Uni Bielefeld.
Auf der sogenannten schlausten Baustelle Europas entsteht neben neuen Uni- und FH-Gebäuden auch der Forschungsbau „Interaktive Intelligente Systeme“, auf den man in Bielefeld mächtig stolz ist. In seiner Empfehlung zur Förderung von Forschungsbauten an Hochschulen hatte der Wissenschaftsrat nämlich den Antrag zur Errichtung eines neuen Forschungsbaus „Interaktive Intelligente Systeme“ landesweit mit Platz 1 bewertet.
Diese Woche hat 3sat eine Themenwoche „Die Macht der Maschinen“ mit vielen Spielfilmen und Dokumentationen zur vielen unterschiedlichen, gesellschaftlichen Aspekten der Robotik.
Gestern zum Beispiel mit Dokumentation zu unbemannten Drohnen, Roboter für medizinische Operationen und Pflege, etc. Die ganze Woche geht es noch spannend weiter.