Roomba, dem erfolgreichen Staubsaugerroboter von iRobot, stehen womöglich in naher Zukunft einige Änderungen ins Haus. Robot Stock News hat Patente von iRobot zu möglichen Änderungen aufgetan.
So ist ein Patent aus dem Jahr 2008 aufgetaucht, dass einen Roombas mit eckiger zeigt, die es dem Roomba erlaubt, auch in Ecken besser zu säubern. 1

Inwieweit sich diese Form auf die Navigationsfähigkeit des Roombas, insbesondere das Befreien aus engen Ecken auswirkt, wird sich zeigen müssen. Dass Roomba damit auch Ecken anständig säubern kann, dürfte jedoch einige Besitzer freuen.
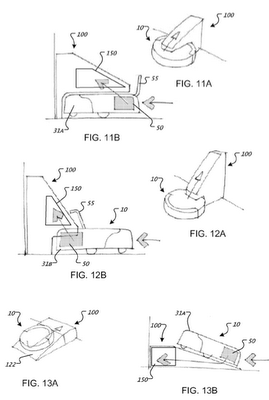
Ein weiteres jüngeres Patent soll Roomba noch selbstständiger machen, indem es ihm erlaubt, sich zu leeren und zu säubern. 2 Dafür hat iRobot gleich eine ganze Armada möglicher Design für Basisstationen entworfen, an denen Roomba den Staub entladen und sich reinigen kann. Eine gute Sache, die Roomba erlauben dürfte, größere Wohnungen auch ohne Anwesenheit des Herrchens vollständig reinigen zu können. Und das ist ja schließlich der Sinn der Sache. Hier einer der Entwürfe von iRobot:
Via Planet Robotics.