Arne Nordmann ist von Kindesbeinen an Robotik-Fan und hat sich deswegen im Dezember 2008 entschlossen, seine Begeisterung in Form eines Blogs zu teilen. Er hat Elektrotechnik an der TU Dortmund studiert und an der Universität Bielefeld in der Robotik promoviert. Seit 2015 arbeitet er bei Bosch in der Forschung an der modell-getriebenen Entwicklung komplexer, software-lastiger Systeme wie z.B. Roboter und hoch-automatisierte Fahrzeuge.
Die Robotik-Softwareschmiede Willow Garage feiert das Fünfjährige ihres open-source Robot Operating System (ROS) mit diesem coolen Artikel und diesem coolen Video:
https://youtube.com/watch?v=zV48Pq0muEkROS: Five Years
Der Artikel zeigt beeindruckend, welche Verbreitung ROS in den letzten fünf Jahren in der wissenschaftlichen Robotiklandschaft erhalten hat, zum Beispiel die Anzahl der offiziell unterstützten Roboter (beeindruckende achtundzwanzig), womit es unter den sonst in der Robotik häufigen Einzellösungen positiv hervorsticht.
Und das alles frei verfügbar unter der BSD-Lizenz!
Glückwunsch! Und alles Gute für die nächsten fünf Jahre.
Nebenan bei Robonews schrieb man vorgestern über Roboter im “echten Leben” – Roboter in Fukushima und versucht, Beispiele für Roboter im „echten Leben“, also für den Einsatz in realer Umgebung, zu geben. Die Idee ist gut, aber die genannten Beispiele können die Überschrift gerade nicht stützen. Ich hatte begonnen, einen Kommentar zu dem Blogartikel zu schreiben. Der Kommentar wurde aber immer länger und ausführlicher, weswegen ich ihn jetzt hier aufschreibe.
Industrieroboter, die dort als Beispiel genannt werden, funktionieren nämlich in der Regel für eine einzelne Aufgabe, in streng strukturierter, abgesperrter und unveränderlicher Umgebung. Und die Bilder des Roboters, der womöglich in Fukushima zum Einsatz kommen soll, sind wohl nicht umsonst alle in einer Halle mit künstlich gebauten und vorher bekannten Hindernissen entstanden.
Wie wenig das mit der echten, harten Realität zu tun hat, deutet sich bei Betrachtung der Reaktionen auf Fukushima an: über Wochen ist dort nämlich zum Erstaunen der breiten Öffentlichkeit kein Roboter zum Einsatz gekommen. Bis die Japaner einen Monat nach dem Unglück mit dem geliehenen amerikanischen Militärroboter PackBotimmerhin ein paar Messungen von innerhalb der Reaktorgebäude bekommen konnten. (Ein Umstand, der einen gehörigen Einfluss auf die öffentliche Wahrnehmung der japanischen Robotik in der eigenen Bevölkerung hatte)
Bilder von PackBot aus dem Innern von Fukushima
Roboter im echten Leben müssen nämlich nicht nur mit ein paar Holztreppen in gut ausgeleuchteter Umgebung zurechtkommen, wie es die Bilder im oben genannten Artikel zeigen, sondern die Realität ist viel brutaler: Plötzlich ist überall Schutt und Wasser, die Temperaturen liegen weit jenseits üblicher Werte, so dass jegliche Standardelektronik versagt. Sensoren versagen, da alles dunkel, nass und dreckig ist. Der Funkkontakt zum Roboter bricht aufgrund der radioaktiven Strahlung ab, usw. …
Dass Roboter außerhalb ihrer Laborumgebung zurechtkommen, müssen sie auch an echten Problemen zeigen, wenn diese auftreten. Hübsche Bilder von Robotern auf Holztreppen Monate nach einer Katastrophe zu zeigen, oder zwei Jahre nach dem Auftreten des Problems einen Roboter dafür konstruiert zu haben, ist kein guter Hinweis für die Einsatzfähigkeit und Robustheit, die für den Einsatz in der Realität außerhalb von Laboren notwendig ist.
Das Problem ist auf ungefähr allen Ebenen unglaublich schwierig. Und gerade deshalb muss man mit Aussagen vorsichtig umgehen, dieses Problem habe man im Griff.
Am morgigen Sonntagabend läuft die Premiere des Dortmunder Tatort Alter Ego (ARD, Sonntag, 20.15 Uhr), der schon vor Wochen an den Bielefelder Robotik-Instituten CoR-Lab und CITEC seine Schatten voraus warf.
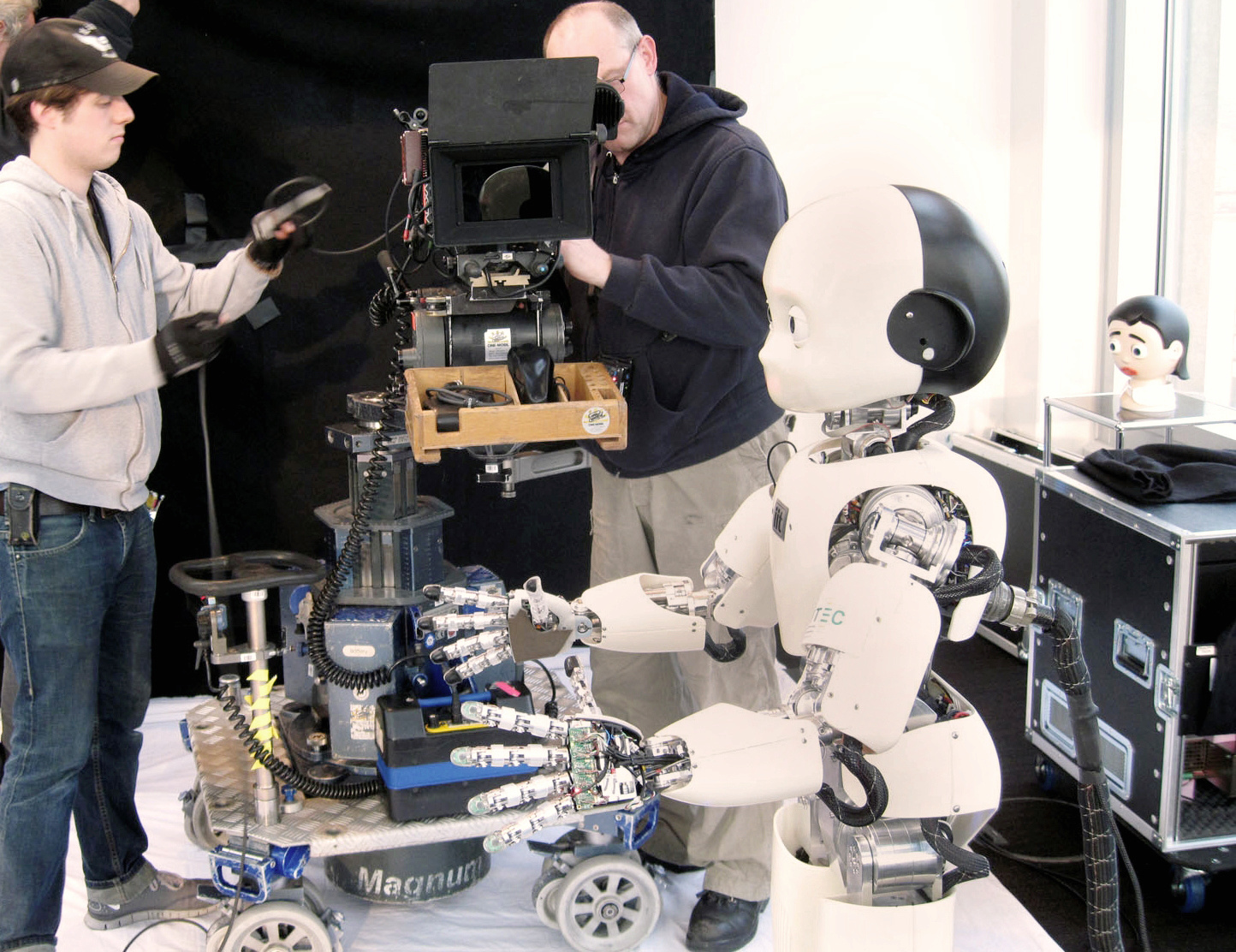
Der Grund: Die Spurensuche führt die Kommissare im Tatort in ein Technologiezentrum spielt, in dem an menschenähnlichen Robotern geforscht wird. Für den Spielfilm wurde das Technologiezentrum mit den zwei Bielefelder Robotern iCub und Flobi ausgestattet wurde. Die Ermittlerin befragt darin eine Tat-Zeugin, während ihr Kollege mit unserem iCub spielt.
Der Roboter wurde dazu so programmiert, dass er von einem Schauspieler gesteuert werden konnte, dessen Bewegungen mit Infrarotsensorik erfasst und gleichzeitig vom iCub nachgespielt werden.
Vorbereitung einer Filmszene mit dem Bielefelder iCub
Das Humanoids Lab am CoR-Lab, in dem der iCub normalerweise steht, ist nur wenige Türen von meinem Büro entfernt und auch wenn ich nicht selbst an den Vorbereitungen beteiligt war, erinnere ich mich an so manchen langen Abend, an dem im Lab die Vorbereitungen liefen. Schon Tage vor dem Dreh wurden die Roboter für den Auftritt vorbereitet und programmiert, denn die Anforderungen für einen Filmdreh sind andere als die der täglichen Forschungsarbeit am Institut, insbesondere die neue Umgebung mit vielen Menschen, viel Hektik, neuen Anforderungen und komplett anderen Lichtverhältnissen als im gewohnten Labor. Die Kollegen Florian Lier, Simon Schulz, Lars Schillingmann und Frank Hegel haben dann auch den Roboter nicht nur selbst zum Drehort gebracht, sondern auch den ganzen Drehtag vor Ort betreut.
Leider ist das zahlreiche Filmmaterial mit dem Roboter letztendlich stark gekürzt worden, auf etwa 5 Sekunden. Spaß hat es allen Beteiligten aber wohl trotzdem gemacht und war für die Bielefelder Robotik auf jeden Fall eine spannende Erfahrung.
Ein Linktipp: Boris Hänßler schreibt in seinem Blog Robotergesetze über den Film „Mensch 2.0“, der Ende des Monats in die deutschen Kinos kommt:
Ich kann den Film sehr empfehlen. Es kommen zwar die üblichen Verdächtigen zu Wort, Hiroshi Ishiguro, Kevin Warwick, Ray Kurzweil, Bruce Duncan usw. Aber der Film verbindet die Robotik-Forschung mit der Frage, was Menschsein heutzutage bedeutet – und was es heißt, künstliche Intelligenz zu schaffen.
Boris Hänßler
Die Beschreibung des Films klingt hochinteressant und könnte in Teilen thematisch an den Film Plug&Pray anknüpfen. Spennend ist sicher auch das Interview mit dem Macher des Films, Alexander Kluge, das Boris Hänßler gemacht hat und das laut eigener Aussage in zwei Wochen erscheint.
Positiv ist mir auch aufgefallen, dass künstliche Intelligenz nicht als Bedrohung erscheint. Alexander Kluge ist weder Optimist noch Pessimist. Das finde ich sehr angenehm.
Heute sind die DGR-Tage 2012, das zweite Jahrestreffen der Deutschen Gesellschaft für Robotik, zu Ende gegangen. Dieses Mal wurden sie gemeinsam von Olliver Brock, Marc Toussaint und Ivo Boblan an der TU Berlin ausgerichtet. Das Jahrestreffen teilt sein hehres Ziel mit dem von botzeit propagierten Robotik-Stammtisch, allerdings deutschlandweit: Nämlich den Austausch der deutschen Robotik-Forschungslandschaft, insbesondere der Doktoranden, zu fördern.
Dementsprechend waren am ersten der beiden Veranstaltungstage zwanzig Doktoranden, dieses Mal auch ich, eingeladen, ihre Projekte und ihre Forschung vorzustellen. Viele interessante Projekte, aufgeteilt nach den Forschungsfeldern Perception (Umgebungswahrnehmung), Representations and Learning (Umgebungsrepresentation und maschinelles Lernen), Manipulation and Motion Planning (Greifen und Bewegungsplanung), Robot Programming und Flying, Swimming, Rolling.
Der Vorträge des zweiten Veranstaltungstags wurde mit Vorträgen verwandter Disziplinen und den deutschen Big Players der Robotikszene gefüllt: u.A. Michael Beetz, Helge Ritter und Wolfram Burgard (dem sich der erste Beitrag von botzeit widmete).
Die Teilnahme an dieser Veranstaltung (die es auch im nächsten Jahr wieder geben soll), kann ich jedem nur empfehlen, der sich für die deutsche Robotik-Forschungslandschaft interessiert. Hier zeigen sich die deutsche Unis und Robotikinstitute und zeigen Ausschnitte aus ihren aktuellen Forschungsprojekten. Dem abschließenden Aufruf der Veranstalter, die Mailingliste der DGR zur Anmeldung zu empfehlen, die über diese und ähnliche zukünftige Veranstaltungen informiert, kann ich mich deswegen nur anschließen.
Der neue flinke Vierbeiner Cheetah von Boston Dynamics zeigt in den letzten Tagen, dass selbst die schnellsten Menschen nicht mehr vor Robotern sicher sind. Cheetah rennt in dem folgenden Video für einen kurzen Moment über 45 Stundenkilometer (28,3 mph) schnell, und überholt damit selbst Usain Bolt, der bei seinem Weltrekord-Lauf 2009 auf 100 Metern im Schnitt knapp 38 km/h schnell lief.
Von Doping ist bei Cheetah übrigens nichts bekannt, wohl aber ist der Roboter die ganze Zeit seitlich geführt und der Druck für die Hydraulik kommt auch noch über Schläuche von außerhalb.
Cheetah in Aktion - zwischenzeitlich 45 km/h schnell (28,3 mph)
Dass der Roboter so schnell laufen kann und den alten Rekord von 21 km/h (13.1 mph) aus dem Jahr 1988 so beeindruckend brechen konnte, liegt übrigens weniger an stärkeren Motoren und besserer Hardware, sondern hauptsächlich an einer cleveren Koordination der Körperteile, die man sich vom biologischen Vorbild abgeschaut hat. Zum Beispiel, dass die Vorderbeine beim Laufen innen an den Hinterbeinen vorbei geführt werden können, was wie beim echten Geparden große, raumgreifende Schritte erlaubt.
Und Boston Dynamics will noch mehr: Der Nachfolger soll im nächsten Jahr im freien Terrain laufen können und dabei auch Richtungswechsel beherrschen. Dass Boston Dynamics für die Zukunft auch anpeilt, den Geschwindigkeitsrekord des echten Gepards (110 km/h) zu brechen, steht außer Frage.
Der deutsche Robotiker Sebastian Thrun ist mittlerweile Professor für künstliche Intelligenz an der Stanford University. Er gewann 2005 mit seinem Team und dem autonom fahrenden VW Touareg „Stanley“ die hochdotierte DARPA Grand Challenge und gilt spätestens seitdem als großer, wenn nicht größter, Vertreter der Probabilistischen Robotik: Also der Robotik, die, vereinfacht gesagt, nicht mehr versucht, ein exaktes Modell der Welt zu finden, sondern lediglich das wahrscheinlichste. Das mag nicht besonders vertrauenserweckend klingen, funktioniert aber ganz hervorragend und fährt mittlerweile erfolgreich Googles autonome Fahrzeuge durch den regulären Straßenverkehr der USA.
Die FAZ hat nun Sebastian Thrun im Silicon Valley besucht und fasst in einem Artikel die Eindrücke zusammen:
Der Deutsche Sebastian Thrun gründete Googles geheimes Forschungslabor „X“, entwickelte Autos ohne Fahrer und brachte die Computerbrille „Glass“ auf den Weg. Nun hat er sich vorgenommen, die Bildung zu revolutionieren.
Die aktuelle Mars-Mission Mars Science Laboratory (MSL) und ihr Curiosity-Rover treten ein großes Erbe an, die Vorgänger-Mission um die Rover Opportunity und Spirit hat sämtliche Erwartungen übertroffen und ihre geplante Missionszeit pulverisiert.
Das ist besonders aufgrund der widrigen Umstände von Marsmissionen imposant. Eine der großen Schwierigkeit der Mars-Missionen ist die große Entfernung zwischen Kontrollzentrum und den Robotern, die eine Verzögerung der Kommunikation von mehreren Minuten bedingt. Die Roboter müssen daher über einen hohen Grad an Autonomie verfügen, um über eine gewisse Zeitspanne den grob vorgegebenen Zielen selbstständig folgen zu können; und das in einer in großen Teilen noch unbekannten und unwirtlichen Umgebung. Die Leistung der Rover ist also kaum hoch genug einzuschätzen.
Eines der spannendsten und anforderndsten Teile der jetzt (an)laufenden Mission dürften allerdings bereits die ersten Minuten nach Eintritt sein:
Curiosity's Seven Minutes of Terror
Wie Ingenieur Adam Stelzner zu Anfang des Videos zurecht sagt: Die Pläne zur Landung des Rovers sehen absolut verrückt aus. Curiosity’s Seven Minutes of Terror (Curiosity’s schreckliche sieben Minuten) nennen die Ingenieure die Tatsache, dass die Landung sieben Minuten dauert, die Information darüber allerdings erst vierzehn Minuten auf der Erde eintrifft. Wenn das Kontrollzentrum das Signal über Eintritt in die Atmosphäre erhält, ist der Rover also entweder bereits heile auf dem Mars gelandet, oder schon seit sieben Minuten auf dem Mars zerschellt. Die komplizierte Landung wird notwendig aufgrund der Größe des neuen Rovers (siehe Größenvergleich rechts).
Es wird also spannend, morgen früh ab ca. 7 Uhr mitteleuropäischer Zeit. Nicht nur wegen der besonders komplizierten Landung, die Erfolgsbilanz der bisherigen Marsmissionen ist mit nur 15 geglückten von 39 Marsmissionen ohnehin nicht so gut. 1
Gut verfolgen lässt sich der Missionsverlauf einerseits über die offiziellen Seiten wie zum Beispiel die zur Mission Mars Science Laboratory der NASA. Aber auch die deutschsprachige Wikipedia hat einen tollen Artikel mit fantastischen Bildern und Illustrationen und das Jet Propulsion Laboratory der NASA teilt schon seit Tagen faszinierende Informationen, Bilder und Videos bei Facebook in Vorbereitung des Finals.
Fundstück bei der Literaturrecherche: „Learning Motor Control by Dancing YMCA“. Veröffentlicht 2010 von Rikke Amilde LÄvlid auf der Konferenz Advances in Information and Communication Technology:
To be able to generate desired movements a robot needs to learn which motor commands move the limb from one position to another. We argue that learning by imitation might be an efficient way to acquire such a function, and investigate favorable properties of the movement used during training in order to maximize the control system’s generalization capabilities. Our control system was trained to imitate one particular movement and then tested to see if it can imitate other movements without further training.
Abstract
Leider habe ich kein Video dazu finden können.
Der Norweger Rikke Amilde LÄvlid von der Norwegian University of Science and Technology ist allerdings nicht der einzige, der den YMCA-Tanz für wissenschaftliche Publikationen nutzt. Auch zwei seiner Kollegen publizieren dazu, wie Google Scholar verrät.
Die International Conference on Robotics and Automation (ICRA) 2012 hat begonnen. Wie jedes Jahr trifft sich hier eine vierstellige Anzahl Robotik-Wissenschaftler der ganzen Welt, um aktuelle Forschung vorzustellen und zu diskutieren.
Und den kleinen Kumpel oben im Bild bekommen haben ich sowie alle Gäste der ICRA in diesem Jahr zur Begrüßung geschenkt bekommen. Wie geschaffen für ein Robotik-Blog mit dem Namen „botzeit“ …
Um der Konferenz zu folgen, empfehle ich wie immer Planet Robotics, sowie für den Livestream die Twitter-Hashtags #ICRA und #ICRA12.