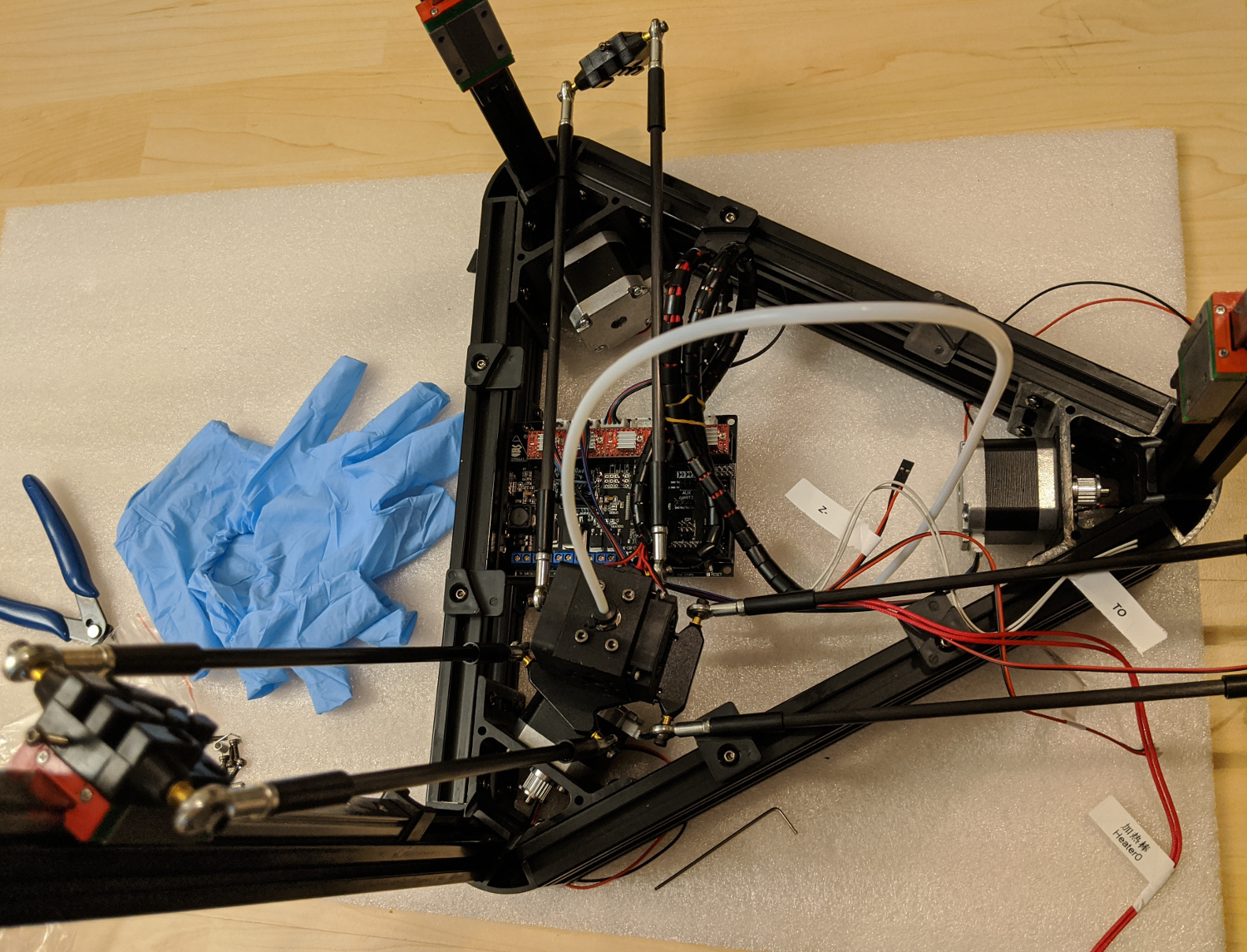
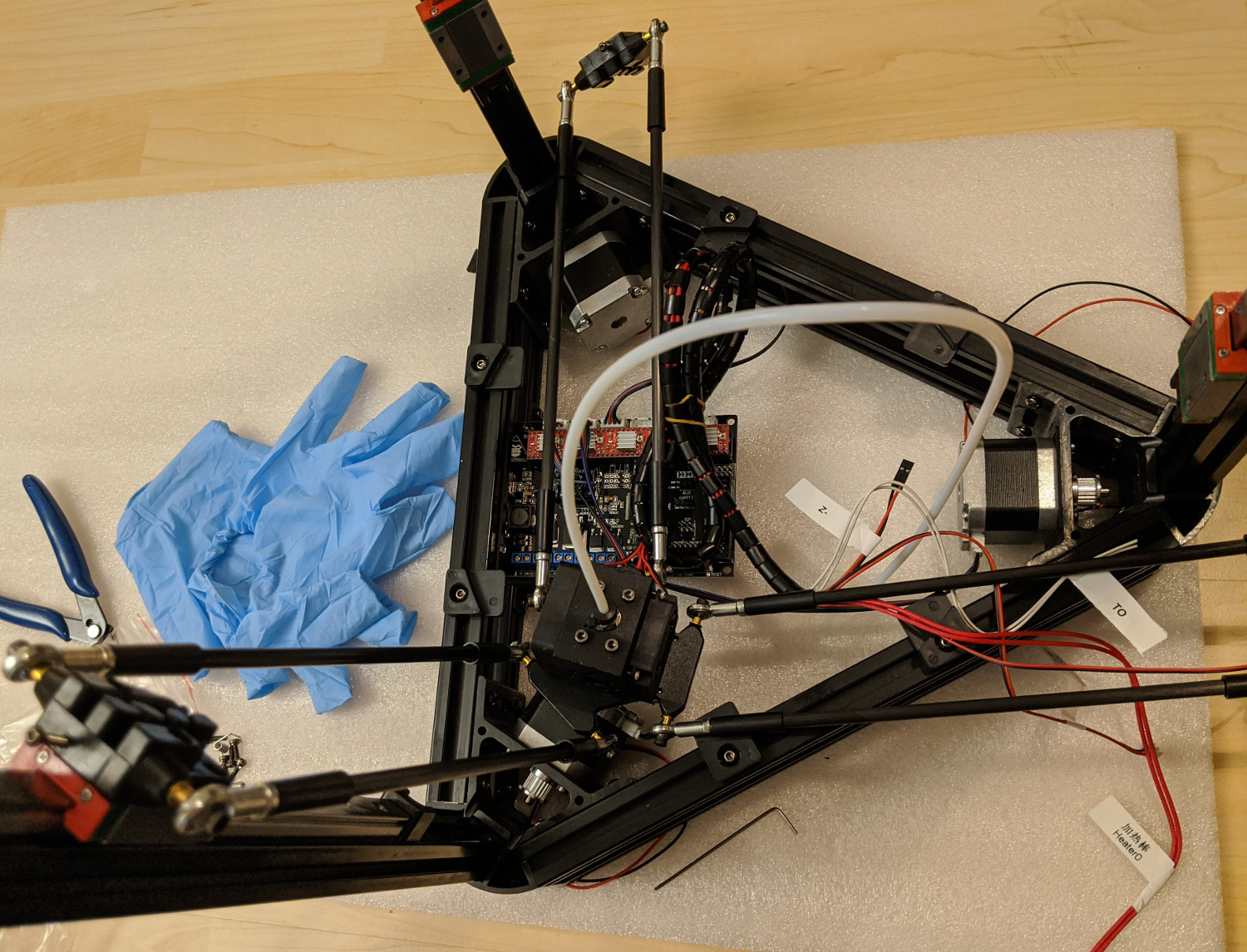
Man kann ja bekanntlich nie genug Roboter haben, weswegen ich mein loses Interesse an 3D-Druckern kürzlich genutzt habe, mir einen besonderen solchen schenken zu lassen. Auch wenn es 3D-Drucker nämlich in langweiliger, und schon zusammengebauter, Kastenform zu kaufen gibt, hatte ich meine Augen auf einen Delta-Drucker geworfen. Geworden ist es dann der AnyCubic Delta Kossel Plus. Das ist nämlich nicht nur ein Delta-Roboter zum Drucken, sondern außerdem ein Bausatz. Den zusammen zu basteln hat mich vorgestern Abend beschäftigt, was allerdings eine gewollte und sehr schöne Abendbeschäftigung war:

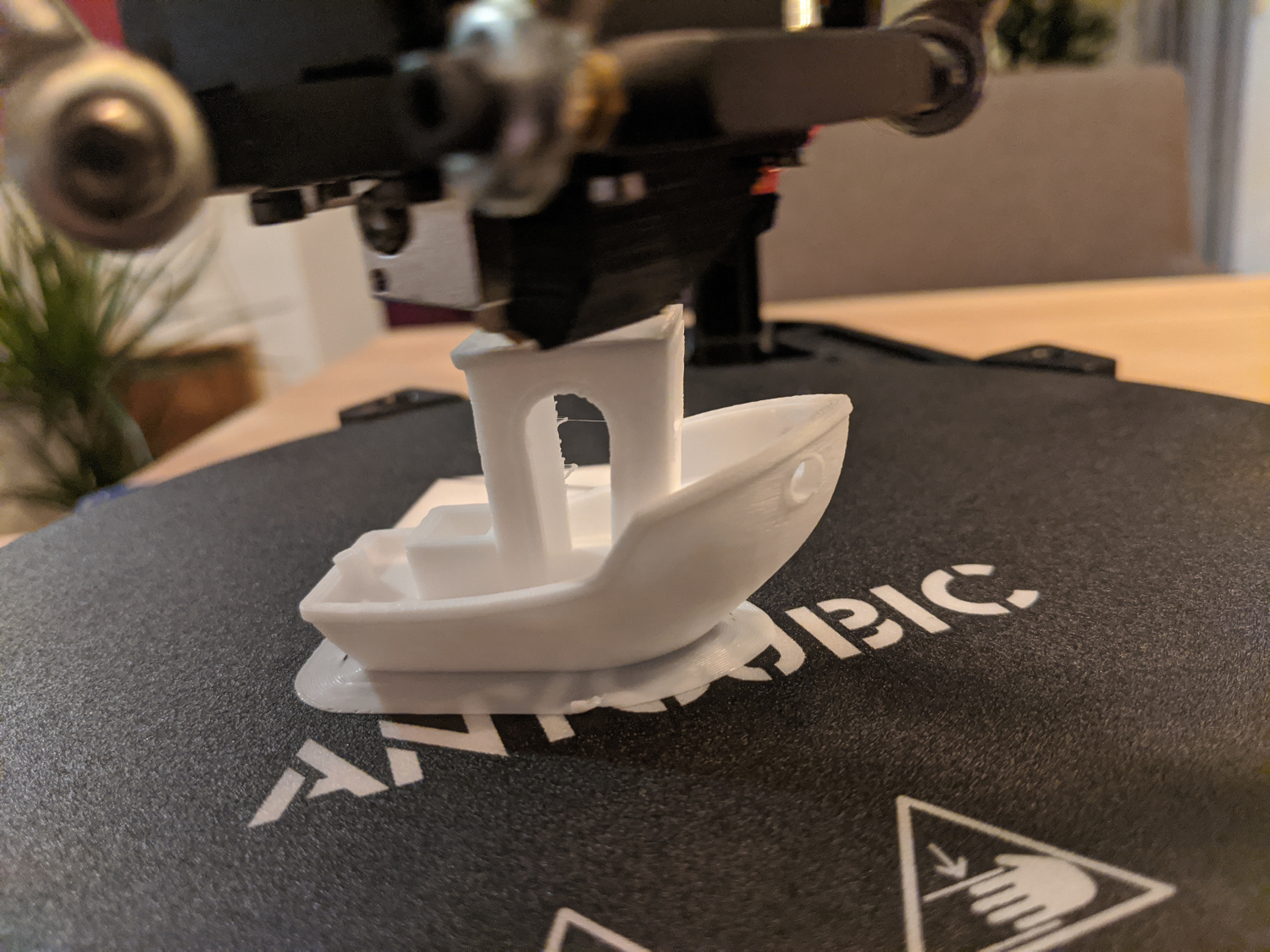
Heute dann habe ich mich ganz grundsätzlich mit Slicern auseinandergesetzt und zu meiner großen Überraschung bereits ein erstes anständiges Modell drucken können. Das Modell, natürlich, der 3D-Testdruck-Klassiker 3DBenchy. Wenn man sieht, wieviel beim Druck in Bewegung ist, alle drei Arme sind in konstanter und teils ruckartiger Bewegung, um den Druckkopf zu manövrieren, bin ich wirklich erstaunt, wie präzise und sauber schon der erste Druck geworden ist:
Und der Drucker ist einfach extrem cool anzusehen!
Beim Druck ist alles in Bewegung.
Auch wenn es sicherlich robustere 3D-Drucker gibt macht es wirklich Spaß, dem Delta-Drucker bei der Arbeit zuzusehen. Die Entscheidung für diesen Drucker werde ich glaube ich nicht bereuen, zumal die Inbetriebnahme unter Linux absolut problemlos verlief.
(Ja, das Video ist bescheiden, aber es kommen sicherlich in den nächsten Wochen bessere Videos. Ich werde sicherlich noch das ein oder andere Roboterfigürchen drucken.)