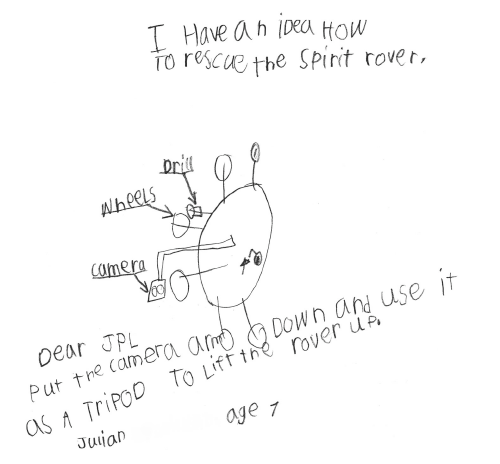
Der Mars-Rover Spirit hat sich vor einiger Zeit im Mars-Sand festgefahren und kommt nicht mehr frei. Der 7-jährige Julian hat nun der NASA gezeigt, wie man Instrumente kreativ einsetzt und seine Idee zur Lösung des Problems aufgemalt:
Vorschlag von Julian: Kamera-Arm benutzen
Julian schlägt vor, dass die NASA den Kameraarm als Stütze benutzt, um den Roboter aus dem Sand zu stemmen. Paolo Bellutta, Hauptzuständiger für das Fahren von Spirit, ist begeistert und will nun versuchen, die Idee in ähnlicher Form umzusetzen.
Das Jet Propulsion Laboratory der NASA erlaubt es jedem Besucher der Website, seinen Namen in eine Liste einzutragen, die in einen Chip gegossen im Jahr 2011 mit dem Mars Science Laboratory auf den Mars geschossen wird.
Von der ICRA 2009, der diesjährigen International Conference on Robotics and Automation sind mittlerweile die Videos einiger Beiträge online verfügbar. Die ICRA ist die Internationale Robotik-Konferenz mit üblicherweise viel Robotik-Prominenz, in diesem Jahr in Kobe in Japan.
Wer wissen will, was die internationale Forschung in der Robotik zur Zeit bewegt, sollte dort vorbeischauen. Die Videos finden sich hier: ICRA Podcast
Als Video finden sich dort sowohl Beiträge deutscher Robotik-Prominenz wie von Prof. Dillmann aus Karlsruhe als auch Beiträge zu aktuellen internationalen Entwicklungen wie zum Beispiel das aktuelle Exoskelett HAL oder Nano-Robotik. Die Proceedings der Konferenz mit allen Veröffentlichungen findet sich wie üblich bei IEEE Explore (kostenpflichtig).
Aus dem Wikipedia-Eintrag zur ICRA: „Die International Conference on Robotics and Automation (kurz ICRA) ist eine internationale Konferenz zum Thema Automatisierung und Robotik. Sie wird veranstaltet von der IEEE Robotics and Automation Society. Die ICRA zählt neben der IROS zu den wichtigsten Konferenzen in der Robotik. Sie findet seit 1984 regelmäßig jährlich an wechselnden Orten im Frühjahr oder Sommer statt.“
Wer die Möglichkeit hat oder bekommt, dem empfehle ich sehr einen Besuch der ICRA. Im besten Fall als Teilnehmer, z.B. mit einem eigenen Konferenzbeitrag, sonst als Besucher. Einige Konferenzen haben auch Besuchertage, zumindest für regionale Besucher. Auch wenn sich dabei womöglich nicht den wissenschaftlichen Beiträgen folgen lässt, so ist schon allein die Ausstellung mit den zahlreichen Robotern den Besuch wert!
Nachtrag: Hier finden sich Artikel zur ICRA 2012, die ich in Saint Paul besuchen durfte, sowie der ICRA 2020, die wegen der COVID-19-Pandemie online stattfinden musste. Noch mehr Artikel zur ICRA finden sich hinter unserem ICRA tag.
Finanziert durch die US-amerikanische National Science Foundation hat die Computer Research Organization (CRA) eine Roadmap für die Robotik in den USA erstellt. „A Roadmap for US Robotics − From Internet to Robotics“ heißt der Report und wurde in Zusammenarbeit mit zig renommierten US-amerikanischen Universitäten erstellt.
Die Analyse zu Beginn zeichnet kein besonders positives Bild des aktuellen Stands der Robotik in den USA und mahnt dringend Handlungsbedarf an:
Unfortunately, the United States lags behind other countries in recognizing the importance of robotics technology. While the European Union, Japan, Korea and the rest of the world have made significant R&D investments in robotics technology, the U.S. investment, outside unmanned systems for defense purposes, remains practically non-existent. Unless this situation can be addressed in the near future, the United States runs the risk of relinquishing its ability to globally compete in these emerging markets putting the nation at risk of having to rely on the rest of the world to provide a critical technology that our population will become increasingly dependent upon.
Computer Research Organization
Zentraler Kritikpunkt ist also, dass die USA bislang verpasst hat, das Potential der Robotik auch im zivilen Sektor zu realisieren und sich auf nationaler Ebene fast ausschließlich um die militärische Robotik bemüht. Die Befürchtung, dadurch in Zukunft bei einer Kerntechnologie nicht unabhängig sondern von anderen Nationen abhängig zu sein, ist eine Urangst der USA.
Der 94-seitige Report (PDF, 1,32 MB) der CRA zeigt aber auch einen Plan − eine Robotik-Roadmap − auf, wie die USA wieder Anschluss in der Robotik gewinnen kann. Die Roadmap ist in Roadmaps zur Automation, medizinischen Robotik und Servicerobotik unterteilt.
Einige der Kernziele für die nächsten 15 Jahr sind:
Künstliche Exoskelette für den Menschen, die über Gehirn und Nerven gesteuert werden
Ornithopter, die das Zehnfache ihres Gewichts tragen können
Eine 100-mg-Batterie mit über 500 kJ/kg
Sensorik zum Tragen auf der Haut für medizinische Anwendungen (z. B. Prothesen)
Nicht nur werden Roboter zunehmend schlauer, selbstständiger und geschickter, auch die Hardware, die Aktorik wird besser. So lernen Roboter seit einiger Zeit nicht nur das Fahren, Laufen und den aufrechten Gang, sondern lernen durch neue Materialien und Methoden neuerdings auch, ebene Wände hochzulaufen.
Sie sind damit nicht nur nützlich, um an Orte zu klettern, die für Menschen nur schwer zugänglich oder gefährlich sind, sondern wecken natürlich auch Begehrlichkeiten in Sachen Überwachung. Roboter, die leise und unbemerkt Wände hochklettern können, können bequem Mikrofone oder Kameras durch Fenster halten.
Hier einige aktuelle Beispiele:
RiSE
Jüngster Spross ist RiSE von der University of Pennsylvania in der dritten Version:
RiSE V2 und V3
Die dritte Version wurde in Zusammenarbeit mit Boston Dynamics entwickelt, die schon durch andere beeindruckende Roboter aufgefallen sind. Während Version 1 und 2 des RiSE für ebene Wände gedacht waren, klettert die dritte Version Masten, Pfähle und Bäume hoch.
RiSE V3 klettert senkrecht mit beeindruckenden 30 cm pro Sekunde und hält damit aktuell den Geschwindigkeitsrekord. Er hat dazu sechs Beine, die mit mikrometer-großen Klauen ausgerüstet und unabhängig angesteuert sind. Mehr zum RiSE bei Boston Dynamics.
SpinyBot
Ähnlich funktioniert der SpinyBot der Stanford University, der zwar langsamer aber trotzdem erstaunlich ebene, glatte Wänder erklimmt und trotzdem auch mit den Fugen einer Klinker-Wand keine Schwierigkeiten hat. Inspiriert ist der SpinyBot von Kakerlaken und Spinnen.
Der StickyBot aus Stanford, der aussieht wie ein Gecko, ist dagegen für gänzlich glatte Oberflächen (Glas, Keramik, …) geeignet. Während andere Roboter dafür eine Menge Saugnäpfe nutzen, die im Wechsel an- und abgeschaltet werden müssen, ist beim StickyBot die Grundlage für die Haftung Adhäsion 1 durch Wahl eines geeigneten Materials sowie Anpassung an die zu erklimmende Oberfläche in Zentimeter-, Millimeter- und Mikrometer-Skala.
Kürzlich war hier von Tweenbots zu lesen, die darauf ausglegt waren, durch Hilfe von Passanten ihren Weg durch den Washington Square Park und zum Ziel zu finden.
Was die Tweenbots passiv durch ihr putziges, hilfesuchendes Erscheinungsbild und ein kleines Fähnchen mit der Bitte um Hilfe erledigten, macht ein aktueller Roboter aus München aktiv und sehr viel fortschrittlicher.
ACE (Autonomous City Explorer, autonomer Stadterforscher) erkennt Personen, fährt auf sie zu und fragt sie nach dem Weg. Er bittet sie dabei, mit dem Arm in die Richtung zu zeigen, die zum Ziel führt. Über seine Kameras ist der Roboter in der Lage, die gezeigte Richtung zu erkennen und dem Weg zu folgen. Während der Fahrt weicht der Roboter zudem natürlich Hindernissen und Passanten aus.
Im Video legt der ACE mit Hilfe von 38 Passanten in fünf Stunden die 1,5 Kilometer zu seinem Ziel zurück. Mehr zum ACE gibt´s auf der Projektseite der TU München.
Der Deutsche Verkehrssicherheitsrat (DVR) will herausgefunden haben, dass Notbremsassistenten bis zu 20 Prozent aller Unfälle vermeiden können. Tritt der Fahrer durch die Warnung des Systems eine halbe Sekunde früher aufs Bremspedal als ohne Bremsassistent, reduziert sich die Unfallwahrscheinlichkeit bereits um ein gutes Drittel. 1
Autofahrer treten im Gefahrenfall häufig zu zaghaft auf die Bremse. ABS springt dadurch häufig nicht an und die maximale Bremswirkung wird nicht erreicht. Ein Notbremsassistent kann an dem Bremsverhalten des Autofahrers erkennen, dass Gefahr besteht und automatisch die notwendige Vollbremsung einleiten − und das sehr viel schneller als ein menschlicher Fahrer dies könnte. Je nach Fahrer kann damit eine Verkürzung des Bremsweges um 15 bis 40 Prozent erreicht werden.
Für LKW, bei denen Auffahrunfälle besonders dramatische Folgen haben können, hat die EU übrigens in diesem Jahr beschlossen, dass die Ausrüstung mit den Bremsassistenten ab 2013 Pflicht wird. 2 Für PKW gibt es zwar zur Zeit noch keine entsprechenden Pläne, die Zahlen, die der DVR nennt, zeigen aber, dass diese Form der Fahrerassistenz im Interesse jeden Autofahrers liegen dürfte.