Das Uncanny Valley (englisch für „unheimliches Tal“) ist die Bezeichnung für einen psychologischen Effekt, der in der Robotik bei humanoiden Robotern auftritt. Der Effekt ist scheinbar widersprüchlich, aber deutlich messbar. Er bewirkt, dass humanoide Roboter dem Menschen nicht in dem Maße vertrauter werden wie sie ihm ähnlicher werden.
Bis zu einem gewissen Maße ist dies zwar der Fall: Ein ASIMO ist uns vertrauter als eine Blechbüchse. Aber irgendwann kippt dieser Effekt und wir beginnen, uns zu gruseln. Es ist der Moment, in dem unser Unterbewusstsein beginnt, in dem Roboter tatsächlich eine menschliche Gestalt zu erkennen. Unser Unterbewusstsein beginnt in dem Moment allerdings auch, an diese menschliche Gestalt all die Ansprüche zu stellen, die wir an einen Menschen stellen. Wir erwarten Mimik, dass sich der Brustkorb beim Atmen bewegt, dass die Augen mit uns Blickkontakt aufnehmen, vielleicht blinzeln und wir erwarten vor Allem weiche, natürliche, menschliche Bewegung. Sehen wir eine menschliche Gestalt (die gilt übrigens im gleichen Maße für animierte Figuren etwa in einem Computerspiel) und vermissen diese Aspekte, signalisiert uns unser Unterbewusstsein, dass irgendetwas nicht stimmt. Schuld ist hier wie so oft unser Fortpflanzungstrieb, der uns potentielle Partner kontinuierlich auf Hinweise auf Fehlbildungen oder Krankheiten absuchen lässt.
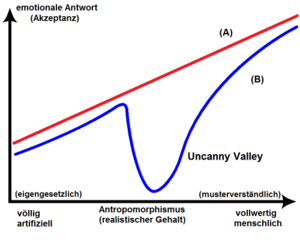
Der Effekt lässt sich wie gesagt messen und wie in obiger Grafik darstellen (entnommen der Wikipedia). Die Grafik zeigt in rot die intuitive Annahme, dass die (emotionale) Akzeptanz mit der Menschenähnlichkeit steigt und in blau die tatsächliche Akzeptanz, die kurz vor der Menschenähnlichkeit dramatisch einknickt und den Betrachter verstört.
Zurück zur Robotik: Das Uncanny Valley zu Umschiffen ist für die Erbauer humanoider Roboter eine wichtige Frage. Wollen Sie den Roboter für die Interaktion mit dem Menschen erbauen (und das ist bis auf wenige Ausnahmen bei Humanoiden der Fall), ist einem mit einem Roboter, der den Betrachter verstört, nicht viel geholfen.
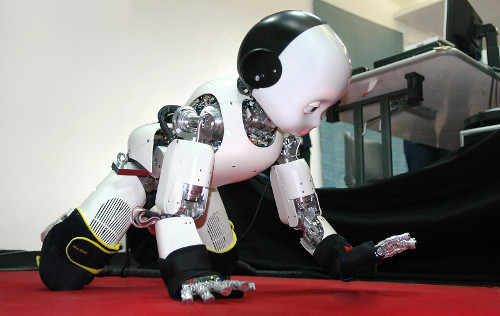
Viele Entwickler entscheiden sich deshalb bewusst für eine schemenhafte, manchmal gar comic-hafte Gestalt, die uns schon vertraut ist, aber bewusst nicht ähnlich genug, um ins Uncanny Valley zu geraten. An dieser Stelle wollte ich auf ursprünglich auf den iCub verweisen, der für mich ein gutes Beispiel darstellt. Ein Kommentar in meinem Beitrag zum iCub zeigt jedoch, dass es da offenbar deutliche Unterschiede gibt. Simon ist vielleicht ein noch besseres Beispiel.
Und damit komme ich zum ursprünglichen Antrieb für diesen Blogbeitrag: Ein neuer Roboter auf der internationalen Bildfläche der Telenoid R1:

Der Roboter ist nicht nur ein humanoider, sondern er ist sogar ausdrücklich zur Kommunikation mit einem Menschen konstruiert. Er ist ein Telepräsenzroboter und damit dafür gedacht, einen Diskussionspartner zu vertreten, der irgendwo auf der Welt in eine Kamera spricht. Der Roboter gibt die Sprache weiter und versucht, die mit der Kamera aufgezeichnete Gesichtszüge und Mimik nachzuahmen.
Die reduzierte Gestalt des Roboters ist Absicht und soll erlauben, dass der Telepräsenzroboter sowohl weibliche als auch männliche, sowohl junge als auch ältere Gesprächspartner repräsentieren kann.
Hier scheint es mir doch deutlich der Fall zu sein, dass die Uncanny-Valley-Empfindung im japanischen Raum entweder eine komplett andere ist oder von dem allgemeinen Robotik-Enthusiasmus schlicht überschrieben wird. Dass jemand 6.000 Euro bezahlt (der geplante Preis bei Markt-Einführung), um sich in einem Gespräch von dem merkwürdig anmutenden Telenoid mit seinen Stummelarmen vertreten zu lassen, scheint mir in westlichen Ländern mindestens unwahrscheinlich. Das Konzept, die Telepräsenz auf die Art und Weise durch die physische Präsenz eines Avatars noch realistischer zu machen, ist mir zwar einleuchtend, aber wer will schon während der Telepräsenz tief im Uncanny Valley sitzen?
Und hier sieht man den Roboter im Einsatz, für mich sieht das nicht nach einer besonders vorteilhaften Gesprächssituation aus:
Der Telenoid kommt übrigens von dem gleichen Schaffer, Hiroshi Ishiguro, der auch schon für den Geminoid verantwortlich zeichnet, der ähnliche Reaktionen hervorrief.




{kind=link}