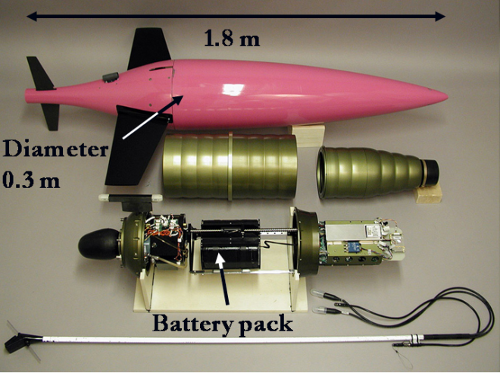
Bis zu zehn Monate kann der Unterwasserroboter Seaglider autonom, ohne Hilfe und ohne Energie nachzutanken durch den Ozean schwimmen. Auf der Suche ist er dabei nach Schnabelwalen, kleinen Delfin-ähnlichen Walen, und deren Gesang.
Der Seaglider zieht seine Bahnen durch den weiten Ozean rund um Hawai und kann so bis zu 4600 Kilometer alleine schwimmen und bis zu 650 Tauchgänge in Tiefen bis zu 1000 Metern absolvieren. Er soll dabei den Gesang der Schnabelwale aufzeichnen. Im Vergleich zu dem Gesang von zum Beispiel Buckelwalen ist der Gesang der Schnabelwale nämlich deutlich hochfrequenter und breitet sich daher nicht so weit aus und ist nur aus geringer Entfernung wahrzunehmen. Der Seaglider kann die Wale aber in Ruhe aufspüren und ihnen im richtigen Abstand folgen, um die Gesänge aufzuzeichnen. Immer wieder taucht der Seaglider an die Oberfläche, um Kontakt via Satellit aufzunehmen und dabei Ergebnisse zu melden und neue Instruktionen aufzunehmen.
Der Roboter wurde von iRobot und der University of Washington konstruiert. Geld und Ideengeber ist das Office of Naval Research, das im Namen der United States Navy wissenschaftliche Forschung durchführt. Das Projekt läuft vorerst für 20 Tage und ist mit 1,5 Millionen US-Dollar finanziert.
Ich musste eine Weile überlegen, bis ich darauf kam, woran mich der Seaglider erinnert: die Sonde aus Star Trek IV: Zurück in die Gegenwart.
Der Seaglider bei iRobot.
Via Planet Robotics.