Boston Dynamics‚ Roboter ‚Atlas‘ zeigt in einem neuen Video eine einwandfreie Gymnastikkür, wie man sie als mittelmäßig sportliche Person kaum besser zeigen könnte:
LEGO Ideas ist eine Website, auf der alle Legobegeisterten Ideen und Entwürfe hochladen können und diese dann – wenn genug andere Legobegeisterte dafür stimmen – von Lego als Sets verkauft werden.
Via twitter bin ich auf folgenden Entwurf aufmerksam gemacht worden, bei dem ich seit einigen Minuten Supporter Nummer #293 bin:
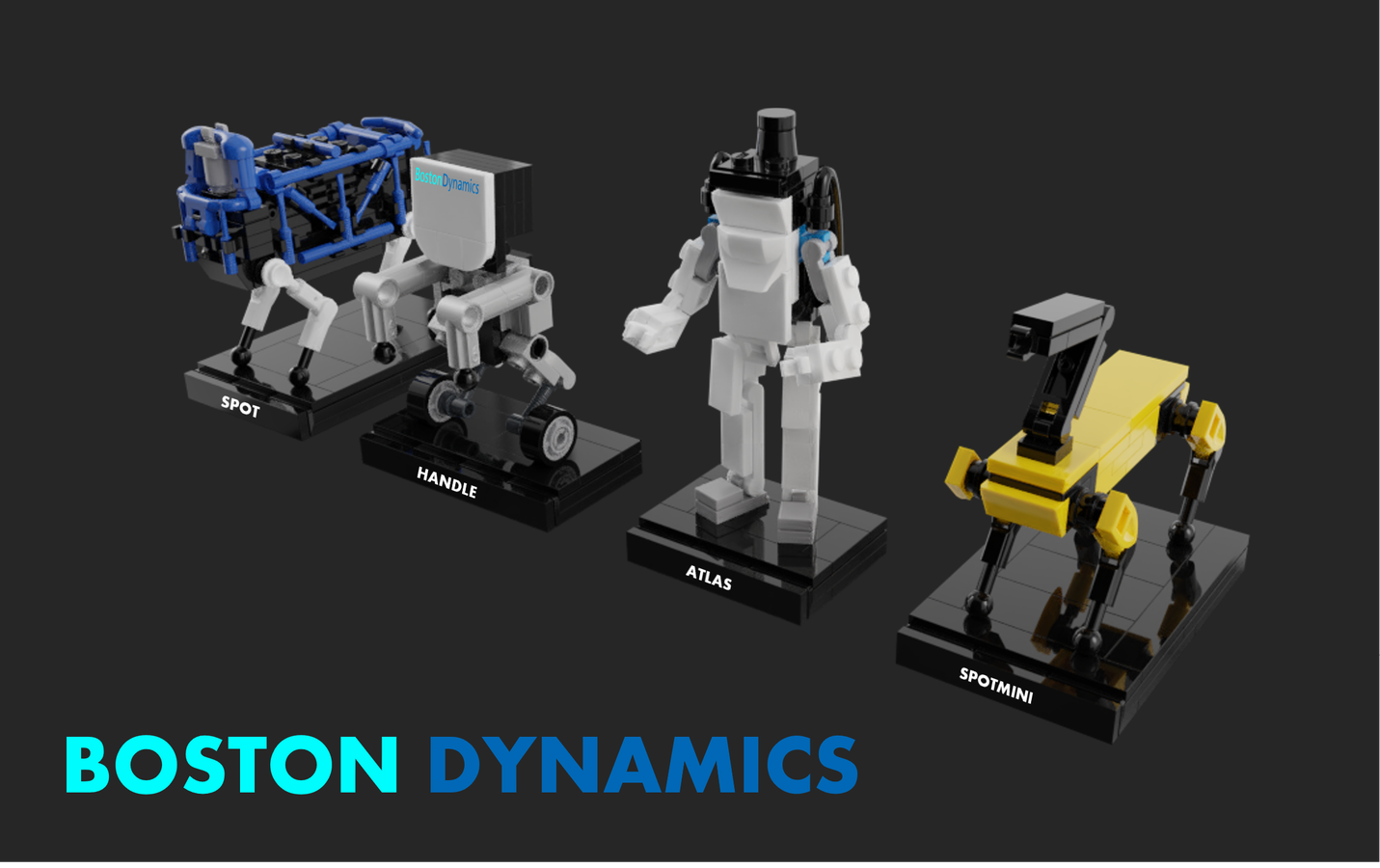
LEGO Ideas Projekt ‚Boston Dynamics‘
Das LEGO Ideas Projekt Boston Dynamics enthält kleine Lego-Roboter, die den berühmt-berüchtigten Robotern von Boston Dynamics nachempfunden sind, z.B.: SpotMini, Atlas, Spot, and Handle. In der Projektbeschreibung steht, dass es gegebenenfalls noch weitere Roboter von Boston Dynamics geben wird, vielleicht kommen ja auch noch BigDog oder Petman dazu.
Zum Abstimmen über das Projekt geht`s hier: Boston Dynamics, zum Abstimmen muss man allerdings angemeldet sein.
Es gibt auch noch viele andere tolle Roboter-Ideen, TARS aus dem Film Interstellar finde ich zum Beispiel auch sensationell.
Ich glaube, ich werde bei Gelegenheit mal eine neue Kategorie in diesem Blog einführen, in die ich Artikel über Entwicklungen einsortiere, die zu meiner Kindheit, Jugend oder – wie im heutigen Beispiel – auch in den letzten Jahren wie Science Fiction klangen, jetzt aber Wirklichkeit geworden sind. Eine Kategorie „Die Zukunft ist da“ oder „Science Non-Fiction“ oder so. Dieser Artikel handelt von einem rührenden Beispiel, das gerade dieser Tage in Tokyo Wirklichkeit wird. Dort hat am 26. November das Cafe DAWN ver.ß eröffnet, in dem Gäste ausschließlich von Robotern bedient werden, die von gelähmten Personen ferngesteuert werden.
Der Roboter OriHime-D bei der Arbeit, kellnernd, ferngesteuert von einer gelähmten Person aus ihrem Bett.
Dass in einem Restaurant oder Cafe von Roboter gekellnert wird, klingt selbst schon nach Science Fiction, ist den Robotik-Interessierten aber mittlerweile einigen Orten auf der Welt bekannt. Dass diese Roboter aber nicht einfach eine technische Aufgabe erfüllen, sondern in diesem Fall gelähmten Personen die Möglichkeit bieten, in einer Form an der Gesellschaft teilzunehmen, wie sie es sonst nicht einfach tun könnten. Von zu Hause, im Bett legend, haben Sie die Chance, einer bezahlten Arbeit nachzugehen und über den Roboter mit fremden Menschen in Kontakt zu treten. Wer sich hier nicht an „Surrogates“ – Mein zweites Ich erinnert fühlt … und diese Zukunftsvision ist nicht einmal zehn Jahre alt, vom September 2009.
Das Cafe ist übrigens erst ein einmal nur ein Experiments zusammen mit dem Robotik-Startup Ory und endet bereits am 7. Dezember diesen Jahres. Ich finde, es ist trotzdem ein Blick in die Zukunft und eine wunderbare Anwendung der Robotik. Wer weiß, was daraus noch wird.
Kurzes Video aus dem Cafe.
Die Zukunft ist da. Und hier setzt sie Technologie zum Wohle von Menschen ein.
Mehr Informationen und Videos gibts bei soranews24.com.
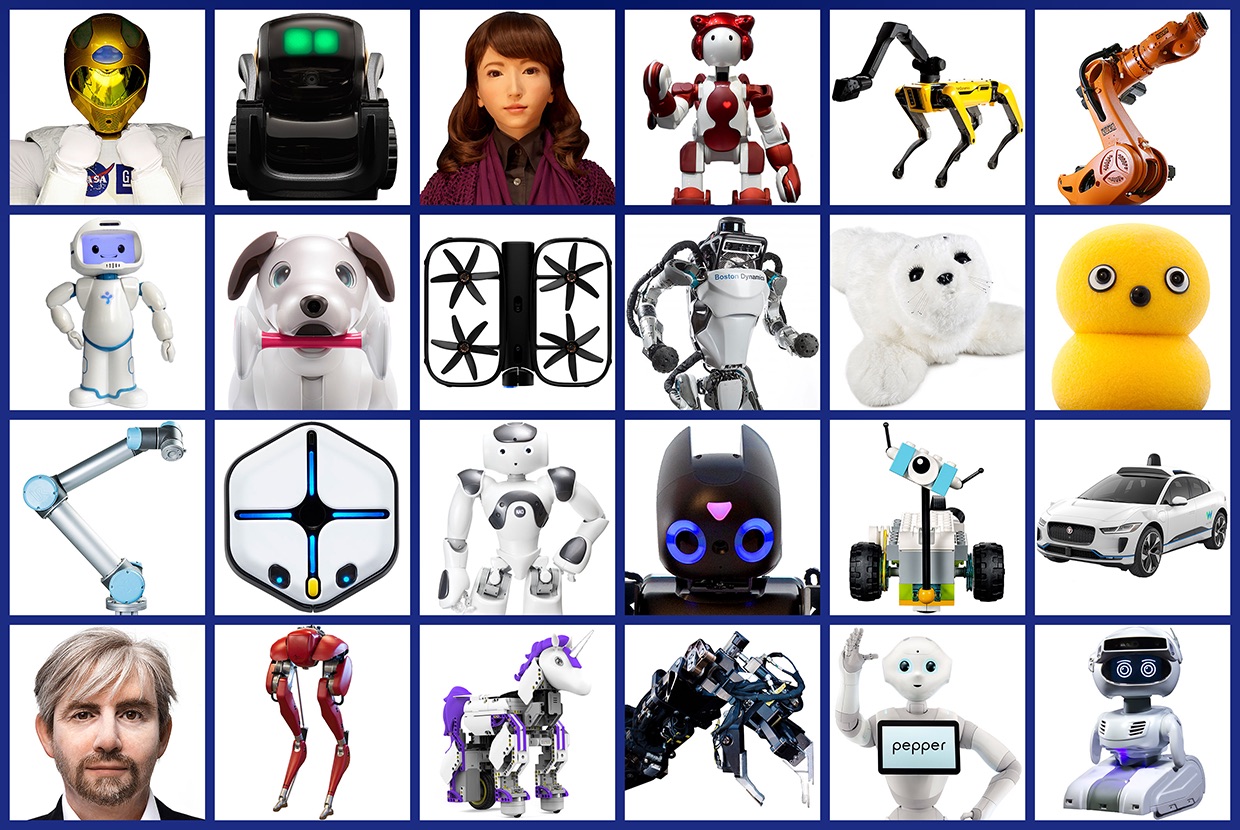
Die Robotik-Landschaft ist um eine weitere Website reicher, die es in sich hat. https://robots.ieee.org ist eine (zur Zeit noch ausschließlich englischsprachige) Sammlung von über 200 Robotern aus 19 Ländern und enthält alles, was in der Robotik Rang und Namen hat: ASIMO, Aibo, Pleo, … viele Roboter, die hier im Blog auch schon Thema waren, z.B. Roomba, iCub, der gruselige CB2, der niedliche Keepon, usw.
Quelle: IEEE Spectrum
Alle Roboter sind mit fantastischen Bildern, Videos und Hintergrundinformationen ausgestattet (im Moment noch alles auf Englisch). Bei ASIMO lassen sich zum Beispiel die Prototypen sehen, die Honda seit dem Start seiner Entwicklung 1986 gebaut hat.
Die Website ist eine wunderbare Sammlung, die weiter wachsen wird und unter Anderem zum Ziel hat, Schüler für Roboter und damit für (Ingenieurs)-Wissenschaften, Mathematik und Technik zu begeistern.
… drei Wissenschaftler aus der Abteilung Advanced Robotics des IIT in Genua. Sie saßen des Morgens beim Kaffee und entwickelten diese Idee. Die Idee von einer Weihnachtsgeschichte, in der die am IIT entwickelten und eingesetzten Roboter die Protagonisten darstellen:
Youtube-Video: A Robot Christmas Story
Unter den Kollegen fand die Idee großen Anklang. Schnell wurden Meetings angestzt, um die Geschichte auszuarbeiten und zu verfeineren. Die Kollegen von der Medienabteilung wurden hinzugezogen um technische Details zu klären. Schließlich wurden Requisiten gekauft und Zeitslots für die Roboter reserviert, so dass wir die Dreharbeiten parallel oder gar im Anschluss zum ganz normalen Projekt- und Forschungsalltag durchführen konnten.
Wie Ihr im Making of sehen könnt, hatten wir dabei viel Spaß, auch wenn nicht immer alles so auf Anhieb geklappt hat:
Youtube-Video: The making of...
In diesem Sinne allen Lesern frohe Feiertage und einen guten Start ins neue Jahr!
Eine Woche ist es her, seit der DARPA Robotics Challenge (DRC). Noch am Abend des zweiten Wettkampftages haben wir Walkman wieder verpackt und auf den Heimweg geschickt. Anschließend hatten wir Zeit, Schlaf nachzuholen, ein wenig Californien zu erkunden und die DRC-Woche Revue passieren zu lassen.
In der Tat, es ist nicht bei den zwei gestürzten Robotern während des Testlaufs geblieben. Am ersten Wettkampftag sind nahezu alle Zweibeiner früher oder später gestürzt. Jemand hat sich die Mühe gemacht einige der Stürze in einem Video zusammenzufassen:
Stürzende Roboter, via IEEE Spectrum
Etwa ab Sekunde 00:19 ist Walkman zu sehen. Die Aufnahme zeigt unseren ersten Lauf in der zweiten Gruppe am Freitag Morgen. Innerhalb von acht Minuten und zwölf Sekunden hatte Walkman den Polaris Ranger von der Startlinie durch den Parcours zu Eingangstür der simulierten Industrieanlage gefahren und damit den ersten Punkt geholt. Wie im nachfolgenden Video ab Sekunde 50 zu sehen, wurde Walkman dabei kräftig angefeuert.
Walkman’s erster Lauf, angefeuert von seinem Team
Zu diesem Zeitpunkt hatte Walkman zunächst die beiden Atlas Teams, die offenbar technische Schwierigkeiten hatten, weit hinter sich gelassen. Doch dann standen plötzlich für mehrere Minuten auf allen vier Bahnen sämtliche Roboter still. Offenbar gab es bei allen Teams Probleme mit der Kommunikation zwischen den Piloten und dem Roboter. Die Verzögerungszeit auf allen Bahnen wurde daher an die Wettkampfzeit angehängt. Allerdings zehrten die Roboter während dieser Zeitspanne weiterhin von ihren Batterien…
Als es weiterging, öffnete Walkman problemlos die Tür und setzte an, die diese zu durchschreiten. Wir hatten dies in unserer Garage mehrfach geübt. Aufgrund der sehr breiten Schultern des Roboters (ca. 80 cm), ist das Durchschreiten der Tür nicht ganz einfach. Die Strategie bestand also in einer Drehung des Roboters auf der Stelle um 90°. Anschließend passierte Walkman die Tür mit Seitwärtsschritten. Leider brach Walkman unmittelbar nach dem Öffnen der Tür plötzlich einfach zusammen (siehe Video). Glücklicher Weise hat sich Walkman bei diesem Zusammenbruch quasi abgerollt, sodass nichts passiert ist. In der Tat ist von diesem Sturz kaum ein Kratzer zu sehen.
Die Ursache für den Zusammenbruch ist nicht klar. Die Batteriekapazität lag noch bei 80 %. Faszinierender Weise stürzte exakt zur gleichen Zeit auf der Roboter auf der Nachbarbahn. Bei einem Sturz schaltet das Team den Roboter per Funk über einen sogenannten E-Stop Schalter aus, um weitere Schäden zu vermeiden und eine sichere Annäherung an den Roboter zu ermöglichen. Da ein Übersprechen zwischen den E-Stops beider Teams nicht ausgeschlossen werden konnte, gewährte uns die Wettkampfleitung freundlicher Weise eine Wiederholung des Laufs ab dem Zeitpunkt der Kommunikationspanne. Das bedeutet, wir durften am Abend des gleichen Tages noch einen Versuch unternehmen. Der Versuch startete an der Stelle vor der Tür mit der uns am Morgen an dieser Stelle noch verbliebenen Zeit. Dieses mal gelang es die Tür zu durchschreiten. Leider geriet Walkman unmittelbar auf der anderen Seite der Tür ins Straucheln, fiel mit lautem Scheppern auf die Seite und drehte sich anschließend auf die Frontseite. Er kam auf den Knien und dem Schutzkäfig am Kopf jenseits der Türlinie zum liegen. Damit hatten wir dann immerhin unseren zweiten Punkt geholt.
Die am Roboter angebrachten Polster haben auch bei diesem Sturz schlimmeres Verhindert. Eine Schraube zur Befestigung des Ellenbogen Polsters war deutlich verbogen. Diese Schraube hatte beim Aufprall ein Loch im Asphalt der Wettkampfbahn hinterlassen. Darüber hinaus war dem Roboter scheinbar nichts ernstes passiert. Dennoch wurden einige Rekalibrationen erforderlich, die wir dann bis in die Nacht hinein durchführen mussten.
Am nächsten Morgen ging es dann nach einem kurzen Testlauf in der Garage zum zweiten Wettkampflauf. Beim Fahren des Polaris Rangers konnte Walkman die Zeit vom Vortag nahezu halbieren. Vor der Tür begannen dann leider wieder die Schwierigkeiten. Zuerst machte sich ein Rattern während der Bewegung des linken Ellenbogengelenks bemerkbar. Während des Drehens auf der Stelle vor der Tür berührte Walkman den Türrahmen und geriet zunächst gefährlich ins Wanken. Wenige Minuten später mussten wir letztendlich Walkmans letzten Sturz des Wettkampfs mitansehen… Dieses Mal hat sich Walkman wohl das Fußgelenk verknackst…
Schade ist, dass wir nach so kurzer Zeit und einem so guten Start in den zweiten Wettkampftag dann doch so früh abbrechen mussten. Dennoch herrscht Einigkeit im Team und auch so manch anderer bekannter Robotiker in Fairplex hat uns das bestätigt: angesichts der kurzen Entwicklungszeit haben wir einen für den Wettkampf ernstzunehmenden Roboter präsentiert, eine gute Leistung gezeigt und sind damit doch sehr weit gekommen. Wir haben zwei Punkte geholt und haben so mit dem 17. Platz immerhin sechs weitere Teams hinter uns gelassen. Das Technologiekonzept scheint also prinzipiell zu stimmen, am Reifegrad der Technologie dürfen wir noch arbeiten. Da der Roboter von der ersten Schraube bis zum letzten Softwarebit selbst entwickelt worden ist, können wir alle gelernten Lektionen auch unmittelbar umsetzten.
Als Fazit war die Woche für jeden vons eine großartige Erfahrung und anders als bei vielen der anderen Teams stellt die Teilnahme an dem Wettkampf nicht das Projektfinale dar. Für das Team Walkman war dies nur ein früher Meilenstein nach einem Drittel der Projektzeit.
Hier noch ein paar Eindrücke von unseren Vorbereitungen in der Garage:
Team Walkman bei den Vorbereitungen
sowie den Wettkampftagen:
Team Walkman beim Wettkampf
Und da es offensichtlich noch Bedarf zur Nachbesserung in Sachen Balance gibt, begann Team Walkman sogleich mit einem passenden Aufbauseminar… am Strand von San Diego
Nachhilfe in Sachen Balance am Strand von San Diego
Das war’s. Das Team Walkman dankt allen, die die Daumen gedrückt und uns angefeuert haben!
Heute durften alle Teams auf dem Wettkampfgelände einen vollständigen Testlauf durchführen. Nach einigen Hardware-Problemen wie einem kaputten Magnetencoder im rechten Knie und einem defekten Ladewiderstand gab es bei dem heutigen Testlauf auf dem Wettkampfparcours schließlich noch Probleme mit einem launigen On-board Switch…
Der Wettkampfparcours. Insgesamt finden vier Läufe gleichzeitig statt.
Immerhin besteht die Chance, dass Team Walkman damit den Vorrat an Pech verbraucht hat und morgen ein glückliches DRC Finale bevorsteht!
Ein hübsch rundes Loch ist das da geworden.Der Versuch eine Tür zu öffnen.
So wie es aussieht haben bei dem heutigen Testlauf insgesamt 12 von 25 Teams nicht einen einzigen Punkt geholt. Bei manchen lief es einfach nicht gut, andere Teams wollten vor dem eigentlichen Wettkampf wohl nicht zu viel riskieren. Zwei Teams sind bereits ausgeschieden. Zwei Roboter sind heute während des Testlaufs gestürzt und es werden wohl nicht die letzten gewesen sein… Es wird also spannend!
So, nach nunmehr drei Tagen am Austragungsort der DARPA Robotics Challenge in Pomona mit viel zu viel Fastfood und wenig Schlaf nehme ich mir die Zeit ein paar Eindrücke über botzeit zu teilen.
Zum Hintergrund des Walkman Projekts
Der Roboter ist 1.85 groß und wiegt etwa 120 kg. Der gesamte Roboter wurde in nicht mehr als 10 Monaten entwickelt, gefertigt und erstmalig in Betrieb genommen. Als ich im Januar in Genua ankam, steckten die extern gefertigten Teile noch in der Zollabfertigung fest…
Als schließlich alle Teile im Institut angekommen waren, wurde der Roboter binnen zwei Wochen zusammengebaut und in Betrieb genommen. Zu diesem Zeitpunkt blieb uns für die Fertigstellung der Qualifikationsvideos für die DRC Finals dann noch ein knapper Monat Zeit.
Auch nach der Qualifikation blieb nicht viel Zeit zum Durchatmen. Während der Qualifikationsexperimente hatten sich ein paar Tücken sowohl in der Hardware, wie auch in der Software offenbart. Alles andere wäre vermutlich auch sehr überraschend gewesen…
Am vergangenen Samstag sind wir schließlich hier in Pomona nahe Los Angeles angekommen und bereiten uns seither auf den Wettkampf vor.
Ein Blick in die Garage von Team Walkman
Eine Art Tagebuch
Sonntag: Registrierung, Begrüßung und Instruktionen
Der Sonntag Vormittag dient im Wesentlichen der Orientierung hier vor Ort. Es ist das einzige Zeitfenster, in dem wir einen kurzen Blick auf die Gegend um Los Angeles erhaschen und einige wenige Sehenswürdigkeiten besuchen können. Nach der Registrierung am Nachmittag findet dann die offizielle Begrüßung und Auftaktveranstaltung statt. Ein kurzer Überblick über die Daten und Fakten zum Event: es sind etwa 600 Team-Mitglieder angereist, betreut wird die Veranstaltung von 300 freiwilligen DARPA-Mitarbeitern. Zahlreiche internationale Pressevertreter haben sich angekündigt. Darunter unter anderem: ARD, BBC News, Daily Planet, IEEE Spectrum, MIT Technology Review, NBC News, Playboy.com, Spiegel Online, TEDx, ZDF.
Montag: der Einzug in die Team Garage
Wir bekommen ab 08:00 Uhr Zugang zu unserer Team Garage. Das ist der Ort, wo wir unsere Rechner, unsere Werkstatt, den Roboter und eine kleine Trainingsumgebung aufbauen.
Wir verbringen den ganzen Tag weitestgehend mit dem Einzug, dem Aufbau der Arbeitsplätze und ausgiebigen Tests des Roboters. Die beste Nachricht des Tages: Walkman ist gesund und munter angekommen. Der Roboter funktioniert einwandfrei. Auch das restliche Equipment hat den Transport unbeschadet überstanden.
Für die meisten endet dieser erste Tag etwa um Mitternacht mit dem Rückweg zum Hotel.
Dienstag: Modultest
Um 09:00 Uhr geht es für mich weiter. An diesem Tag steht Lokomotion im Fordergrund. Wir sind unsicher, wie Walkman mit dem unebenen Wettkampfgelände und vorhandenen Steigungen zurecht kommen wird. Entsprechend werden nach dem Transport einige Modellparameter überprüft und rekalibriert sowie Reglereinstellungen verfeinert.
Am Nachmittag können wir erstmalig den Roboter in eines der von der DARPA für den Wettkampf zur Verfügung gestellten Autos setzen und unsere Fahrzeugmodifikationen für diese Aufgabe testen.
Walkman im Auto
Anschließend haben sowohl Roboter als auchTeam einen offiziellen Fototermin.
Team Walkman (theroboticschallenge.org)
Am Abend geht es weiter mit Lokomotion. Eine Holzplatte und ein paar Balken dienen dienen als Testplattform. Wir testen das Stehen, Laufen und Drehen auf der Stelle auf der hölzernen Ebene mit bis zu 8° Grad Neigung. Der Roboter meistert die Tests und wir beenden unsere Arbeit sehr zufrieden um 03:00 Uhr am Morgen. Wir werden von den Jungs abgelöst, die nun das Autofahren testen werden. Die Kollegen vom IHMC haben uns freundlicherweise zu diesem Zweck bis 11:00 Uhr ihren Polaris Ranger überlassen. Mille mille grazie dafür!
Mittwoch: Manipulation Day Öffnen und Durchschreiten der Tür, Ventil-Aufgabe
Heute steht Manipulation auf der Tagesordnung. Im speziellen das Öffnen und Durchschreiten einer Tür, sowie das Drehen eines Industrieventils. Bei den Arbeiten bereitet uns das linke Kniegelenk Probleme. Einer der Magnetencoder versagt den Dienst. Am Morgen war bereits ein Fehler in der Leistungselektronik aufgetreten. Mir gibt der Ausfall die Zeit, diese Zeilen zu schreiben, während unsere Techniker daran arbeiten, nicht nur das defekte Teil zu ersetzen, sondern auch die Ursache für den Ausfall festzustellen…
Die Atmosphäre in der Garage:
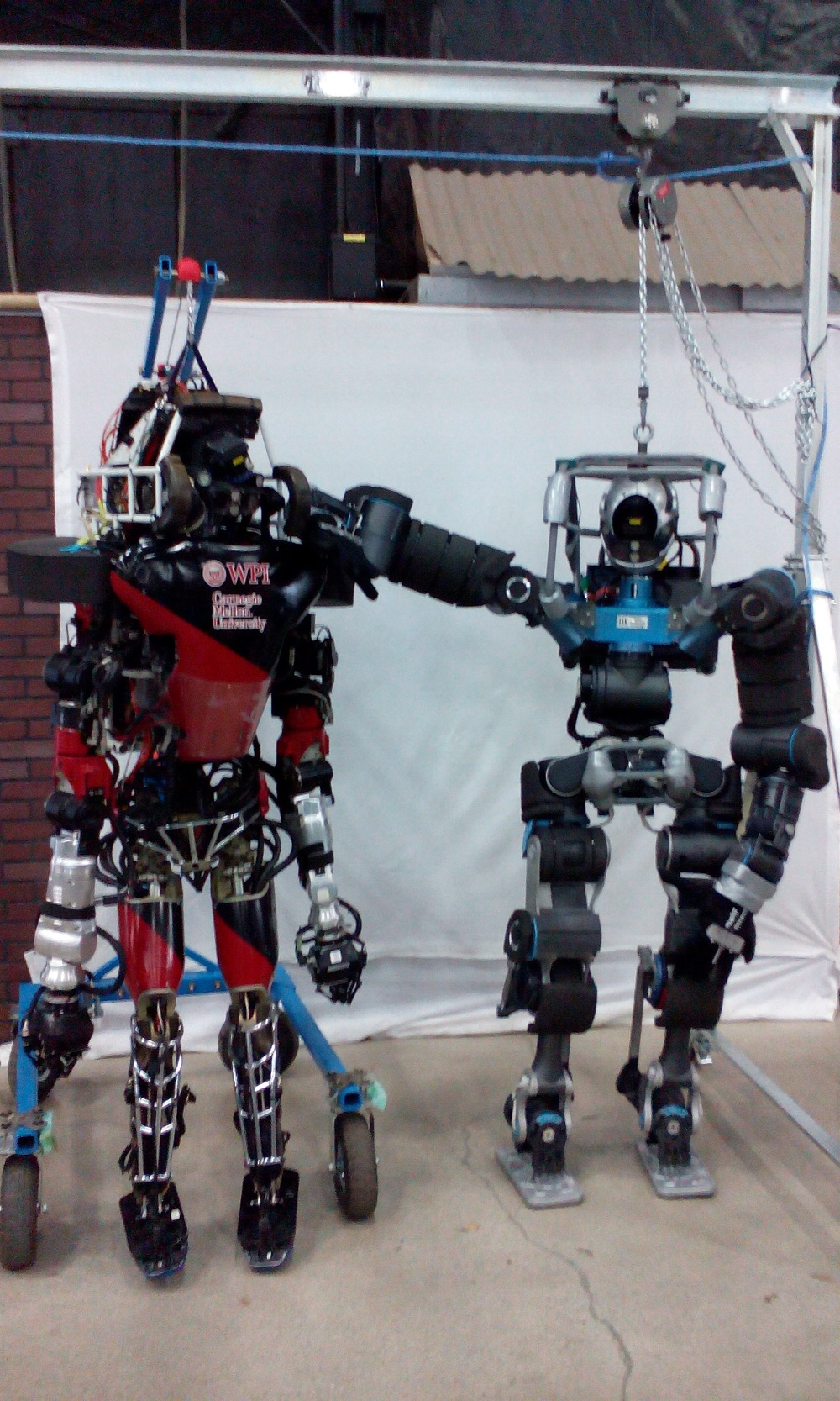
Insgesamt ist die Atmosphäre sehr angenehm. Insbesondere das Miteinander mit den übrigen Teams empfinde ich als sehr angenehm. Die Halle hier ist voll von Menschen, die mit großer Begeisterung an ihren Robotern arbeiten. Bis auf ein einziges Team hängt in jeder Garage ein grünes Schild, dass die Aufnahme von Fotos und Videos ausdrücklich erlaubt. Die Wissenschaftler und Techniker laufen von Garage zu Garage und informieren sich wissbegierig über die Konstruktion, Hard- und Software der anderen Teams. Die eigenen Erfahrungen werden meist gerne geteilt und wie es aussieht, knüpfen manchmal nicht nur Menschen, sondern auch Roboter neue Kontakte:
Atlas und Walkman verstehen sich.
Insgesamt gehen alle Teams sehr hilfsbereit miteinander um. Man leiht sich gegenseitig Ersatzteile und Werkzeug. Gegen Abend zeigt sich dann, welche Teams schon lange dabei sind und entsprechend eine ausgereifte Hard- und Software vorweisen können. Diese Teams verlassen ihre Garage am Abend und genießen ein wenig Freizeit. Andere Teams, die noch jung im Rennen sind und meist ihre Roboter vollständig selbst gebaut haben, bleiben bis in die Nacht hinein. Viele arbeiten im Schichtbetrieb – so wie wir.
Ich erinnere mich gut noch an die ersten DARPA Grand Challenges in 2004 und 2007. Damals habe ich noch den alten VHS Recorder an den Rechner angeschlossen, um den Internet-Stream aufzunehmen. Ich glaube Arne hat immernoch irgendwo meine Aufnahmen von der Urban Challenge? 😉
In der kommenden Woche finden die Finals der aktuellen DARPA Robotics Challenge (DRC) statt. Dabei geht es darum, dass ein ferngesteuerter Roboter in einem simulierten Katastrophenszenario eine Mission aus mehreren Teilaufgaben bewältigen muss. Zu den Aufgaben zählt das Fahren eines Autos, das öffnen und durchschreiten einer Tür, das Herstellen eines Durchbruchs in einer Gipskartonwand, das öffnen eines Industrieventils und einiges mehr.
Eine genauere und anschauliche Beschreibung findet ihr auf Sciencenews.org.
Insgesamt treten am 05. und 06. Juni 25 Teams in der Challenge an. Einen Überblick über die Teams und ihre Roboter gibt’s auf der offiziellen DRC Webseite.
Ich selbst darf als Mitglied des Teams Walkman vom IIT (Istituto Italiano di Tecnologia) dieses Mal alles aus nächster Nähe miterleben.
Unser Roboter ist dieses wunderschöne Stück Technik hier, dessen Entwicklung vor knapp einem Jahr im Rahmen des gleichnamigen EU-Projekts begann:
Walkman
Heute sitze ich am Flughafen und blicke auf einige sehr arbeitsreiche Wochen und Wochenenden seit meiner Ankunft am IIT zurück. In den kommenden Tagen packen wir den Roboter in Pomona aus und beginnen mit den letzten Vorbereitungen und Tests. Auch das werden wohl sehr intensive aber spannende Tage mit unserem Team sowie auch zusammen mit all den anderen Teams. Ich hoffe ein paar Eindrücke an dieser Stelle mit Botzeit teilen zu können.
Eine mittlerweile beliebte Frage auf Messen und Konferenzen, auf denen Hersteller der neuen Generation kollaborativer Roboter als praxistauglich preisen ist: Wie viele eurer Roboter setzt ihr denn selbst bei der Herstellung eurer eigenen Roboter ein?
Die Antwort war bislang in aller Regel ernüchternd: Der KUKA iiwa wird handgefertigt, Baxter habe ich bislang nicht viel mehr als das Aufheben von Objekten machen sehen (und Rodney Brooks musste die Frage auf einer Konferenz auch verneinen), und meine diesbezügliche Frage beim Bosch APAS wurde auch zögerlich bis ausweichend beantwortet.
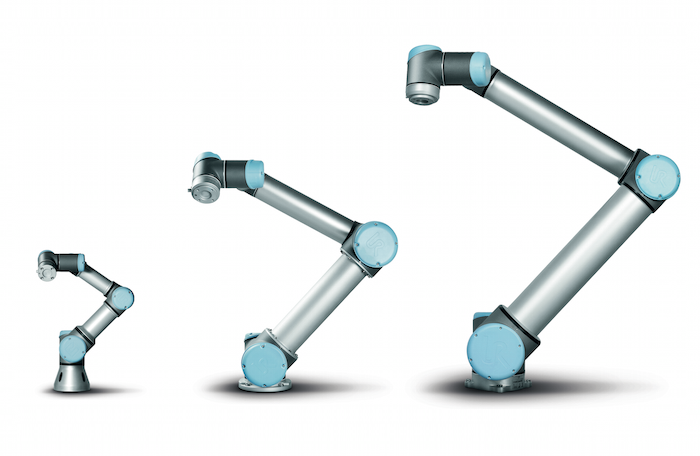
Der dänische Roboterbauer Universal Robots, das seit einigen Jahren mit günstigen und kraftgeregelten Leichtbaurobotern den internationalen Robotermarkt aufräumt, scheint das nun zu ändern. Der neu vorgestellte Universal Robots UR3 ist genau für Fertigungsarbeiten und Werkstattaufgaben gemacht und wird daher Universal Robots eingesetzt, um Kopien von sich selbst herzustellen 1 :
“Our robots are indeed helping to build our robots.” — Esben Østergaard, CTO und Mitgründer von Universal Robots
So sollte es sein. Wenn sie stimmt, gibt mir diese Aussage Vertrauen in die Praxistauglichkeit des Roboters. Und umgekehrt: Wenn der Hersteller seine Produkte selbst nicht einsetzt, warum sollte ich glauben, dass sie mir helfen können?
tl;dr: Der neue Universal Robots UR3 wird von Universal Robots beim Bau seiner eigenen Kopien eingesetzt. Und das ist gut so!
Die Universal Robots UR10, UR5 (von rechts) und links der neue kleine UR3.