
In related news: Das AMARSi-Projekt ist jetzt zwei Jahre alt und ich bin jetzt schon seit zwei Jahren beim CoR-Lab. Jihaa!
Robotik-Blog
In related news: Das AMARSi-Projekt ist jetzt zwei Jahre alt und ich bin jetzt schon seit zwei Jahren beim CoR-Lab. Jihaa!
Seit heute steht fest: Der Spitzencluster 1 „Intelligente Technische Systeme“
aus Ostwestfalen-Lippe hat den Spitzencluster-Wettbewerb gewonnen und damit einen Spitzencluster zur Robotik und Automatisierung gewinnen lassen.

Dazu werden über die nächsten Jahre 40 Millionen Euro für 45 Forschungsprojekte in den Spitzencluster fließen, um einen „Innovationssprung von der Mechanik zu Intelligenten Technischen Systemen“ zu machen.
Die Liste der Partner in dem Spitzencluster liest sich durchaus stattlich und mit der Universität Bielefeld, dem CoR-Lab und dem CITEC, ist die Robotik stark vertreten. Die Themen Mensch-Maschine-Interaktion und Intelligente Sensoren im Projektplan sind dann auch klassische Themen der Robotikforschung.
Ich freu mich! Auf die Projekte, die da kommen werden.
Disclaimer: Ich studiere an der Universität Bielefeld und arbeite für das CoR-Lab.

In knapp drei Tagen, am kommenden Dienstag startet in Istanbul an der Grenze zwischen Europa und Asien die RoboCup-Weltmeisterschaft 2011. Auch ein Team aus Bielefeld, ToBi (Team of Bielefeld) ist wieder in der RoboCup@Home-Liga dabei.
Ich habe deswegen die Gelegenheit des letzten Robotik-Stammtischs genutzt, um mit Frederic Siepmann, dem Verantwortlichen für das Bielefelder Team, ein wenig über den RoboCup und die Vorbereitungen dafür zu sprechen:
Ich: Hey Frederic. Ihr habt ja im letzten Jahr in Singapur den siebten Platz gemacht. Welche Unterschiede und Verbesserungen in diesem Jahr an Eurem System gibt es im Vergleich zum Vorjahr. Und sind überhaupt die Aufgaben wieder die gleichen?
Frederic: In diesem Jahr ist im Prinzip der selbe Funktionumfang wie im letzten Jahr gefordert. Es gibt immer einige kleine Änderungen an Aufgaben, in denen sich im vergangenen Jahr Probleme herausgestellt haben oder die Regeln nicht klar genug formuliert waren. Es hat sich auch ein bisschen etwas an der Punktevergabe geändert, aber im Prinzip sind es die selben Aufgaben.
Daher ist der Unterschied bei uns zum letzten Jahr vor allem, dass damals viele Sachen einfach mit der heißen Nadel gestrickt waren. Das konnten wir jetzt mal etwas intensiver testen und stabilisieren. Im Rahmen der @Home-Liga gibt es auch immer die sogenannte Demo Challenge. Dafür wird immer ein Thema vorgegeben und dort kann man dann im Prinzip tun, was man will. Es muss nur irgendwie in dieses Demo-Konzept passen. In Singapur im letzten Jahr war ein Restaurant-Kontext vorgegeben. Das heißt, wir haben zum Beispiel viel gesehen, dass der Roboter Bestellungen entgegennimmt und den Leuten Getränke bringt; wie man sich das eben von einen Roboter im Restaurant vorstellt. In diesem Jahr ist das Thema Household Cleaning vorgegeben. Da haben wir jetzt bei den German Open noch nicht so sehr viel gesehen, aber man sah, dass viele Roboter versuchen, Gegenstände vom Boden aufzusammeln und in den Müll zu schmeißen …
Ich: Ich glaube, ich habe auch gesehen, wie einer der Roboter versucht hat, mit einem Lappen einen Tisch sauberzumachen …
Frederic: Ja, genau. Das waren wir.
Ich: Ach, das wart Ihr. Und das werdet Ihr auch in Istanbul zeigen?
Frederic: Ja, wir werden mit Sicherheit wieder Tischsäubern zeigen. Wie Du ja weißt, ist die Plattform bei uns ja etwas eingeschränkt, da der Arm nicht soweit herauskommt. Aber wir haben jetzt noch ein paar Extra-Gimmicks eingebaut, zum Beispiel dass der Roboter jetzt dynamisch die Flächen erkennen kann und man dem Roboter zeigen kann, wo er reinigen soll. Es ist für den Roboter natürlich schwierig zu erkennen, wie schmutzig eine Fläche ist. Wenn da Konfetti liegen ist das noch okay, aber bei Staub wird es schon schwierig. Man muss da noch etwas sehen, welche Szenarien da denkbar sind, aber im Prinzip passt das.
Ich: Ihr wart ja im April bei den German Open und habt glaube ich den dritten Platz gemacht …
Frederic: Nee, nach der Vorrunde waren wir zwar auf dem dritten Platz, sind dann im Finale aber noch von den b-it-bots abgefangen worden.
Ich: Ein vierter Platz, mit dem Ihr zufrieden wart?
Frederic: Ja, auf jeden Fall.
Ich: Ich nehme aber an, dass Ihr auch von dort noch Dinge mitgenommen habt, die noch zu verbessern sind?
Frederic: Ja. Die German Open – und vermutlich alle nationalen Vorentscheide – sind immer so ein bisschen ein erster Test Case. Da hat man dann normalerweise zum ersten Mal on site wirklich Zeit, das System intensiv zu testen. Die Studenten bekommen dann auch zum ersten Mal wirklich mit, wie das ist: Wenn es dann wirklich auf Kommando losgehen soll, hektisch ist und die Hardware überall herumfliegt usw. … von daher ist das ein super Testszenario, das würde ich auch nicht missen wollen.
Ich: Zum ersten Mal auch unter den echten Wettkampfbedingungen …
Frederic: Richtig! Man muss dann auch zum ersten Mal richtig in die Arena hereinfahren und dann stehen dort Objekte und Möbel herum, die man nicht erkennen kann. Man kann sich dann auch wirklich intensiv und mit viel Zeit um den Roboter kümmern, da ja dann auch das gesamte Team da ist. In der Uni mischen sich dann ja auch immer viele andere Dinge dazu. Das hat uns auch wieder ziemlich viel gebracht in diesem Jahr. Wir konnten viele Dinge für die weitere Arbeit in unserem Wiki festhalten: Dinge, die gut und Dinge, die nicht so gut gelaufen sind und die wir noch verbessern wollen.
Ich: Seit wievielen Jahren seit Ihr jetzt mit Eurem System beim RoboCup@Home vertreten?
Frederic: Tatsächlich erst seit 2009. Damals sind wir aus dem Stand auf den achten Platz gekommen, was ziemlich gut war. Im letzten Jahr sind wir dann wie gesagt Siebter geworden, dieses Jahr werden wir sehen, was passiert.
Ich: War das damals die gleiche Plattform wie in diesem Jahr?
Frederic: Ja gut, wir haben die seitdem natürlich etwas modifiziert, aber die Basis ist die gleiche geblieben. Wir hatten damals die neue Plattform bekommen und in dem Rahmen beschlossen, dass die Teilnahme an der @Home-Liga eine brauchbare Sache wäre. Diese Liga hat eben Anforderungen, die unserer sonstigen Forschung insgesamt schon recht ähnlich sind. Das erste Team hat natürlich erst einmal die meiste Arbeit, weil einige der Basiskomponenten einfach noch nicht für die Plattform zur Verfügung standen. SLAM zum Beispiel musste erst einmal darauf gebracht werden. Oder Objekterkennung. Das war zwar schon vorhanden, aber eben noch nicht auf dieses Robotersystem portiert. Das war viel Arbeit zu Beginn.
Ich: Kommen bei Euch denn jetzt eigentlich auch im Vergleich zur German Open noch weitere Features dazu?
Frederic: Stabilität ist natürlich auch ein Feature. (lacht) Wir haben aber tatsächlich auch noch ein wenig grundlegend an der Software gearbeitet. Zum Beispiel die Ansteuerung des Arms und die Objekterkennung verbessert. Das heißt, da können wir jetzt auch noch etwas mehr als bei den German Open.
Das klassiche Problem ist ja zum Beispiel, dass wenn man ein Objekt erkannt hat, man den Roboter erst einmal so positionieren muss, dass der Arm das Objekt überhaupt greifen kann. Das stellt sich im Moment noch etwas als Schwierigkeit heraus. Die Software haben wir schon, sie ist aktuell aber einfach noch nicht vollständig ins System integriert.
Ich: Also Frederic, ich nehme an, Deine letzten Wochen waren deutlich von der Arbeit für den RoboCup bestimmt?
Frederic: Das würde ich sofort unterschreiben, ja!
Ich: Das kostet ja insgesamt schon ziemlich viel Zeit, insbesondere natürlich in der Vorbereitung eines Turniers. Inwiefern, würdest Du sagen, profitiert da ein Institut oder vielleicht sogar Du als Wissenschaftler von?
Frederic: Super Frage! Also bei uns ist es ja tatsächlich so, dass ca. 90 Prozent der Teammitglieder jedes Jahr wechseln. Da kommen also jedes Jahr frische, neue Studenten, die an dem Roboter arbeiten wollen. Das ist mit Sicherheit auch etwas Besonderes von dem Bielefelder Team, was natürlich auch besondere Anforderungen an die Entwicklungsumgebung stellt. Wir machen das aber natürlich sehr gerne, weil wir dadurch sehr früh die Studenten mitnehmen können. Von der universitären Seite ist natürlich sehr spannend, dass wir die Studenten so sehr früh in unsere Software einführen können. Die können dann damit wirklich coole Sachen machen, wir haben zum Beispiel unheimlich viele studentische Abschlussarbeiten im Rahmen unserer RoboCup-Teilnahme. Außerdem kommen so auch immer wieder Studenten als Hilfswissenschaftler zu uns. Davon kann natürlich die Universität und das Institut ganz enorm profitieren. Einfach auch weil wir damit natürlich auch viel Manpower dazugewinnen.
Das System als solches, das wir in dem Rahmen entwickeln, und die Entwicklung, die man in der Kürze der Zeit damit macht, würde man wahrscheinlich sonst auch in der Form nicht hinbekommen.
Ich: … wegen der fokussierten Arbeit an einer lauffähigen und stabilen Version …
Frederic: Genau! Also, man mag mir da widersprechen, aber es ist sonst im universitären Umfeld auch nicht so häufig, dass so stark in Richtung eines Systems gearbeitet wird, das wirklich stabil auf einer Plattform läuft.
In wissenschlaftlicher Hinsicht ist der RoboCup immer durchaus zwiespältig diskutiert. Einige sagen, dass die Verfahren einfach schon seit Jahren bekannt sind und es im Prinzip nur darum geht, die schnellere Hardware zu haben. Zum Teil ist das sicherlich auch berechtigt und mag stimmen. Gerade beim Roboterfußball hört man das häufig.
Bei der @Home-Liga trifft das sicherlich nicht so sehr zu. Da lässt sich durch schnellere Hardware nicht so viel wettmachen, weil viele Probleme hier einfach auch noch nicht gelöst sind.
Ich: In der @Home-Liga passiert also auch noch mehr Forschung, würdest Du sagen? Weil es da auch konzeptionell noch mangelt?
Frederic: Die @Home-Liga ist auch einfach noch eine der jüngsten Ligen des RoboCup, ich glaube erst 2005 gegründet worden, und seitdem die am stärksten wachsende Liga. Und die Teilnehmer, ob jetzt Georgia Tech, University of Tokio, Osaka University, Bielefeld und einige andere … das sind Namen, die man durchaus auch im Forschungsumfeld viel hört.
Es sind einfach auch viele Probleme wirklich noch ungelöst. Daher würde ich schon sagen, dass wenn man Forschung in diesem Bereich macht – was Grundvoraussetzung ist – kann man da durchaus von profitieren. Auch, da man dadurch ja Systeme bekommt, mit denen man dann empirische Daten aufnehmen kann. Häufig hat man eben in der Robotik einzelne Komponenten, aber ohne lauffähiges Gesamtsystem kann man keine vernünftigen Tests machen. Das Problem haben wir nicht.
Ich: Du würdest also sagen, dass Du auch als Wissenschaftler davon profitierst?
Frederic: Vielleicht nicht so viel wie ich könnte, aber im Prinzip auf jeden Fall, ja.
Ich: Und ich nehme an, du würdest Studenten in der Robotik auch jederzeit empfehlen, an solchen Wettbewerben teilzunehmen, sofern die Möglichkeit an der Universität oder dem Institut besteht?
Frederic: In meinen Augen ist das das beste, was man machen kann. Das ist das echte Entwicklerleben und nicht die berühmte trockene Theorie, die einem ja sonst häufig in der Informatik vorgeworfen wird. Das einmal mitgemacht zu haben, ist auch wirklich ein Erlebnis. Kann natürlich auch sehr frustrieren sein, wenn es nicht funktioniert. Aber wenn man dann dazu beigetragen hat, einen Platz XY bei der Weltmeisterschaft zu machen und Sachen, die man selbst programmiert hat vor einem Publikum präsentieren kann und der Roboter räumt dann richtig ab … das ist einfach nur genial!
Ich: Okay, Frederic. Danke vielmals für den ausführlichen Einblick und viel Erfolg mit Team ToBi in Istanbul!
Frederic: Danke.
Das Team ToBi bloggt übrigens auch fleißig über den Turnierverlauf und die Vorbereitungen. Frederic Siepmann ist Diplom-Informatiker am Center of Excellence Cognitive Interaction Technology (CITEC) in Bielefeld und seit 2008 Teamlader des Team ToBi.
Wie angekündigt findet auch in diesem Monat am letzten Donnerstag, also in der kommenden Woche am 26. Mai, ein Treffen des frisch gegründeten Robotik-Stammtisches statt. Dieses Mal werden wir uns im Ruhrgebiet im schönen Dortmund treffen. Als Lokalität haben wir das BAM Boomerang in Bahnhofsnähe ausgewählt, in dem für uns ausreichend Platz reserviert sein wird.
Wir freuen uns darauf, an die gesellige Atmosphäre des letzten Stammtisches und an die zahlreichen fachlichen und auch weniger fachlichen Gespräche anknüpfen zu können. Dieses Mal hoffentlich auch wieder mit einigen neuen Gesichtern aus NRW, dem Ruhrgebiet und Umgebung. Ein gutes Mittel dafür ist Mund-zu-Mund-Propaganda, deswegen bitte Ort und Termin fleißig an Robotik-Interessierte weiterleiten.
Mehr zum nächsten Stammtisch, inklusive Karte, gibt`s wie gehabt auf der Stammtisch-Seite (jetzt auch rechts in der Seitenleiste zu finden). Bitte nach Möglichkeit auch wieder ins Doodle eintragen.
Wir sehen uns in Dortmund!

Letzte Woche Donnerstag, am 28. April, traf sich eine mutige Gruppe Robotik-Interessierter aus NRW zur Gründung des Robotik-Stammtisches NRW. Insgesamt ein gutes Dutzent Teilnehmer aus Bielefeld und dem Ruhrgebiet besprachen sich gut speisend und trinkend sowohl fachfremd als auch zum Hauptthema des Stammtisches, wie die unten abgebildete Servietten-Skizze beweist (Thema war maschinelles Lernen in gemeinsamer Diskussion zwischen Dortmundern und Bielefeldern).
Anlass für erste vage Projektabsichten gab das mitgebrachte Maskottchen des ersten Treffens, ein RP6 (rechts im Bild), der möglicherweise bald mit Anbindung an ein Android-Phone aufgerüstet wird. Wissenschaftliche Kontakte wurden auch bereits erfolgreich geknüpft.
Insgesamt zeigten sich alle Anwesenden, mit denen ich gesprochen habe, sehr zufrieden mit dem ersten Treffen und haben sich einstimmig dafür ausgesprochen, das Treffen regelmäßigzu wiederholen. Und auch der einmonatige Rhythmus soll fürs Erste beibehalten werden, vorgesehen ist ab sofort der letzte Donnerstag jeden Monats. Das nächste Treffen ist auch schon geplant und wird am 26. Mai im Ruhrgebiet, in Dortmund stattfinden, um mehr Teilnehmer aus dem Ruhrgebiet und vielleicht sogar von außerhalb anzulocken. Die genaue Lokalität (natürlich zwecks bequemer An- und Abreise wieder in Bahnhofsnähe) wird noch verkündet. Hier werden wie immer Informationen zum nächsten Treffen zu finden sein und dort im Doodle kann man sich schon eintragen.
Ich freue mich schon auf das nächste Treffen und hoffe auch neue Teilnehmer zu sehen. Wie gehabt bitte ich alle Leser, dies an alle Robotik-Interessierte der Region weiterzugeben.
Und jetzt geht`s auf nach Italien.
Ungefährt zwei Jahr ist die Idee nun schon alt und endlich – verzögert durch Ortswechsel und allerhand anderer Gründe, die derlei Dinge gerne verzögern – ist die Umsetzung abzusehen: Die Gründung einer Robotik-Gruppe oder, wie wir es nun nennen, eines Robotik-Stammtisches.
Es gibt einige Robotik-Enthusiasten, die so wie zwei Autoren dieses Blogs, Arne und Jörn, verrückt genug sind, sich nicht nur während der Arbeitszeit mit Robotern beschäftigen zu wollen, sondern die sich auch in der Freizeit mit Robotik beschäftigen und nach Möglichkeit mit Robotern herumbasteln wollen. Alleine macht dies allerdings sehr viel weniger Spaß als gemeinsam und ist überdies im regen Erfahrungs- und Ideenaustausch sehr viel spannender und produktiver. Begünstigt durch die dichte Hochschullandschaft beschäftigen sich zahlreiche Studierende sowie Doktoranden mit den vielfältigen und spannenden Themen der Robotik. Etwas schade ist, dass trotz dieser räumlichen Nähe Bekanntschaften mitunter nur auf Konferenzen entstehen und bisweilen verebben.
Mit dem Ziel also, Robotik-Enthusiasten und -Interessierte zusammenzubringen, gegenseitig Wissen auszutauschen, gemeinsam Ideen zu entwickeln oder einfach nur in entspannter Atmosphäre mit Gleichgesinnten bei einem Bierchen oder anderem Getränk über Robotik zu plaudern, findet am 28.04.2011 in Bielefeld die Gründung des Robotik-Stammtisches NRW statt.
Wer auch immer interessiert ist, ob aus NRW, ganz Deutschland oder weltweit, ist herzlich eingeladen, an dem Treffen teilzunehmen und diese Einladung an andere Robotik-Interessierte weiterzugeben. Als Lokalität für den ersten Stammtisch haben wir Bielefeld und dort zugunsten der einfachen An- und Abreise das New Orleans in unmittelbarer Bahnhofs-Nähe gewählt. Der Stammtisch startet um 19:00 Uhr.
Geplant ist es, den Stammtisch im monatlichen Rhythmus zu etablieren und, da es sich um den Robotik-Stammtisch NRW mit Gründungsmitgliedern aus dem Raum Bielefeld und Dortmund handelt, den Ort des Treffens regelmäßig zwischen Bielefeld und dem Ruhrgebiet wechseln zu lassen. Aktuelle Informationen zu Ort und Termin dieses und zukünftiger Stammtischtreffen finden sich zukünftig hier auf dieser Seite: Robotik-Stammtisch NRW
Wenn Du am Stammtisch teilnehmen möchtest, dann trag Dich nach Möglichkeit bis zum 26.04.11 im Stammtisch- Doodle ein, damit wir einen ungefähren Eindruck zur Anzahl der Teilnehmer gewinnen.
Einen Vorgeschmack zur weiteren Entwicklung in der Robotik hat das Deutsche Zentrum für Luft- und Raumfahrt (DLR) in den letzten Tagen geliefert:
Angetriggert von einem Artikel in der IEEE Spektrum, wie ich annehme, berichteten in den letzten Tagen allerhand englischsprachige Robotik-Blogs (z.B.) über die neue Roboterhand, die das DLR vorgestellt hat.
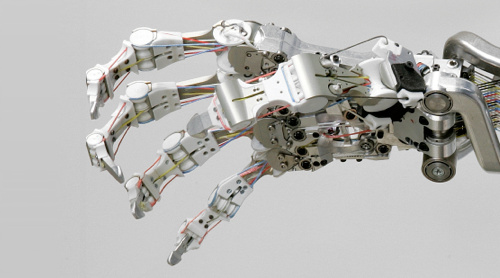
Die Hand sieht nicht nur spektakulär aus, ihre wahre Sensation liegt zum einen in ihrer Ähnlichkeit zur menschlichen Hand und vor allem in ihrer Robustheit. Die Ähnlichkeit zur menschlichen Hand liegt maßgeblich im (technische) Design begründet, das dem Bewegungsapparat der menschlichen Hand sehr Nahe kommt. Dass die Hand in den Blogs dieser Welt unter Bezeichnungen wie Super Robust Robot Hand geführt wird, ist darin begründet, dass das DLR zeigen kann, dass diese Hand selbst mehrere Schläge mit einem Hammer überlebt; mit nahezu allen bisherigen Robotik-Bauteilen absolut undenkbar. Vor allem, wenn sie dafür nicht in eine Schutzhülle eingepackt sein müssen und sich dabei noch so präzise bewegen können.
Hier im Video ist die Hand zu sehen und wie mit ihr umgegangen wird:
Schon auf der Automatica im letzten Jahr zeigte das DLR die Hand plus angeschlossenem Unterarm und zog damals schon viele Blicke auf sich. Dass die Robotik-Abteilung des DLR um Hirzinger plant, sozusagen als nächsten großen Wurf, dieses Designprinzip innerhalb der nächsten fünf Jahr in einen Vollkörper-Humanoiden fließen zu lassen, stimmt mich äußerst erwartungsvoll. Der Plan ist, so hört man aus eingeweihten Kreisen, innerhalb der nächsten fünf Jahre die Hardware des Roboter fertigzuhaben und in weiteren fünf Jahren den Roboter vollständig zu beherrschen, so dass er rennen und Treppen rauf- und runterspringen kann. Und wem ist das mehr zuzutrauen, als dem DLR, nachdem die Robotik-Abteilung zuletzt mit dem Leichtbau-Industriearm gezeigt hat, zu welchen technologischen Sätzen man dort in den Lage ist.
Was diese Hand so besonders robust macht, ist ihr durchdachtes Design, moderne Materialien, aber vor allem die Verwendung von künstlichen Sehnen zur Bewegung der Finger. Diese erlauben es, plötzlich auftretenden Kräften nachzugeben (wie zum Beispiel bei einem Aufprall), so dass die Struktur der Hand und die Elektronik von diesen Kräften nicht verletzt wird. Weiterhin wurden die Sehnen in einer Art und Weise verbaut, die es erlauben, ihre Steifigkeit zu verändern. Also etwa steife Sehnen für einen möglichst präzisen Griff und weniger steife Sehnen, wenn es darum geht, unbekannte Gegenstände zu ertasten, oder empfindliche Objekte sanft zu greifen.
Mit insgesamt 19 Freiheitsgraden ist die Hand außerdem ähnlich bewegungsfähig wie unsere Hand (die gerade einmal einen Freiheitsgrad mehr hat). Bei der Konstruktion haben die Bauer darauf achtgegeben, dass die Bewegungsabläufe der Finger denen menschlicher Finger sehr nahe kommen, was diese Hand insgesamt mit all den obigen Faktoren zur aktuell wahrscheinlich coolsten Roboterhand für Humanoide macht. Der Konferenzbeitrag 1 zu der Hand und diesem Arm wurde auf der HUMANOIDS-Konferenz im Dezember in Nashville folgerichtig mit dem Best Paper Award ausgezeichnet. Dort zeigte der Vortragende Grebenstein im Video, wie mit einem Baseball-Schläger auf den Arm eingeschlagen wird, ohne dass dieser Schaden nimmt. Und das – das macht es so beeindruckend – nicht etwa mit ausgeschalteten Motoren und schlaff herumhängend, sondern in voller Positionsregelung. Ein gehöriger Unterschied, muss man doch bislang mit Robotern jede Bewegung im Vorhinein in Simulation ausführen, um jede Kollision mit eigenen Körperteilen oder anderen Objekten und eine damit einhergehende Beschädigung des Roboters auszuschließen.
Auf den Humanoiden des DLR in diesem Design kann man nur gespannt sein. Mehr und mehr beeindruckende Humanoide hat man in den letzten zwei Jahren die Weltbühne betreten sehen. Aber ein Leichtbau-Roboter, der in jedem Detail so durchdacht und so technologisch fortgeschritten ist, wie es uns mit der DLR-Hand gezeigt wurde, dürfte ein neues Niveau erreichen.
Morgen geht`s für mich auf nach Nashville, Tennessee, wo am Montag eine der – aus meiner Sicht – spannendsten Robotik-Konferenzen stattfinden wird: die HUMANOIDS 2010, eine Konferenz gewidmet der Königsklasse der Roboter: den Humanoiden.
Ich bin am Dienstag auf dem im Rahmen der Konferenz stattfindenden iCub-Humanoids-Workshop iCub and Friends dazu eingeladen, über meine Arbeit der letzten Monate vorzutragen. Workshops wie dieser sind eine tolle Gelegenheit nicht nur vorzutragen, sondern sehr fokussiert – in diesem Fall mit Fokus auf dem iCub – mit den anderen Teilnehmern intensiv Ideen auszutauschen und zu diskutieren.
Ich bin schon sehr gespannt auf die Vorträge der anderen Workshop-Teilnehmer und die Vorträge der Hauptkonferenz an den anderen beiden Tagen. Hoffentlich macht mir der Schnee beim Hinflug keinen Strich durch die Rechnung. Drückt mir die Daumen.
Auf nach Nashville! Yihaaa!
Zu Recht reißt die Robotik den diesjährigen Zukunftspreis an sich: Festo, die in der Vergangenheit schon durch mit beeindruckenden bionischen Experimenten von sich reden machten, wurden gestern am 1. Dezember zusammen mit dem Fraunhofer Institut für Produktionstechnik mit dem Deutschen Zukunftspreis 2010 ausgezeichnet. Ausgezeichnet wurden sie für den folgenden Roboterarm:
Wie schon der Kaffeegreifer besticht diese Entwicklung durch ihr im Kern einfaches Prinzip: Der Arm besteht aus drei Segmenten, die jeweils aus drei Ziehharmonika-förmigen Kunstoff-Hohlkammern bestehen. Jede dieser Kammern wird durch Einpumpen von Luft verlängert und durch Absaugen der Luft verkürzt, wodurch sich der Arm wild verbiegen lässt. Kombiniert mit einem cleveren Greifer, dem Fingripper, der sich um den Gegenstand schließt, den er greift, gibt das eine spannende, neue Robotik-Plattform für den Fertigungseinsatz. Denn wie in der Laudatio richtig gesagt, erlaubt der Roboterarm durch seine weichen, nachgiebigen Strukturen auch eine sichere Zusammenarbeit mit dem Menschen, die in Zukunftsvisionen von industrieller Fertigung eine große Rolle spielt, mit konventionellen schweren Industrierobotern aber nicht denkbar ist. Und auch in der Servicerobotik wird der Bionische Handling-Assistent sicher in Betracht gezogen werden.
Abseits von dem wirklich gut gemachten Werbevideo oben, muss sich nun zeigen, wie gut der Arm beherrschbar ist und sich einsetzen lässt. Die viel beschworene Feinmotorik des Arms – dass er durch seine weiche Struktur und den feinfühligen Greifer auch mit empfindlichen Objekten umgehen kann – setzt nämlich auch voraus, dass man ihn zumindest einigermaßen clever zu den Objekten hinbewegen kann. Und seine ganze Stärke spielt der Arm ohnehin erst aus, wenn auch alle Freiheitsgrade ausgenutzt werden können, um sich wie ein Elefantenrüssel schlängeln und winden zu können, was das Video grob demonstriert, aber noch nicht im wirklichen Einsatz zeigt.
Die Herstellung des Arms ist übrigens auch innovativ: Arm und Greifer kommen nahezu komplett aus einem 3D-Drucker.
Mehr zu dem Arm bei Golem und natürlich bei Festo selbst (PDF).
Ich bin leider etwas zu spät für einen Lesetipp, möchte aber trotzdem noch auf einen Artikel in der vorletzten Ausgabe der
Der Artikel unter dem Titel Lauftraining für Roboter diskutiert den aktuellen Stand der Forschung zum zweibeinigen Laufen bei Robotern, vor Allem am Beispiel des iCubs und des BioBiped aus Darmstadt. Für Interessierte ist der Artikel auch jetzt noch für 1,50 EUR – wenn auch mit umständlichen Bezahlverfahren – zu haben.