Am morgigen Sonntagabend läuft die Premiere des Dortmunder Tatort Alter Ego (ARD, Sonntag, 20.15 Uhr), der schon vor Wochen an den Bielefelder Robotik-Instituten CoR-Lab und CITEC seine Schatten voraus warf.
Der Grund: Die Spurensuche führt die Kommissare im Tatort in ein Technologiezentrum spielt, in dem an menschenähnlichen Robotern geforscht wird. Für den Spielfilm wurde das Technologiezentrum mit den zwei Bielefelder Robotern iCub und Flobi ausgestattet wurde. Die Ermittlerin befragt darin eine Tat-Zeugin, während ihr Kollege mit unserem iCub spielt.
Der Roboter wurde dazu so programmiert, dass er von einem Schauspieler gesteuert werden konnte, dessen Bewegungen mit Infrarotsensorik erfasst und gleichzeitig vom iCub nachgespielt werden.
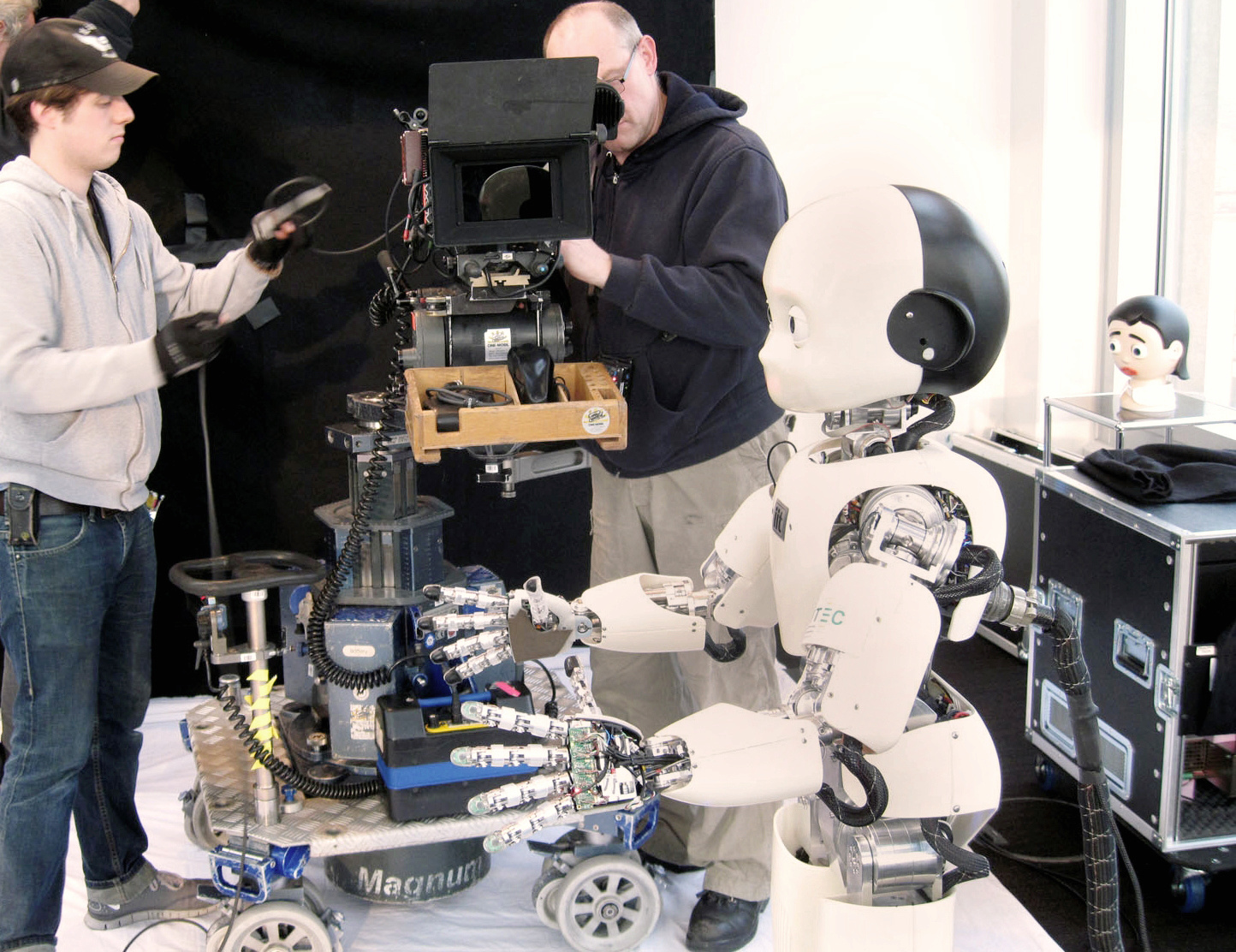
Das Humanoids Lab am CoR-Lab, in dem der iCub normalerweise steht, ist nur wenige Türen von meinem Büro entfernt und auch wenn ich nicht selbst an den Vorbereitungen beteiligt war, erinnere ich mich an so manchen langen Abend, an dem im Lab die Vorbereitungen liefen. Schon Tage vor dem Dreh wurden die Roboter für den Auftritt vorbereitet und programmiert, denn die Anforderungen für einen Filmdreh sind andere als die der täglichen Forschungsarbeit am Institut, insbesondere die neue Umgebung mit vielen Menschen, viel Hektik, neuen Anforderungen und komplett anderen Lichtverhältnissen als im gewohnten Labor. Die Kollegen Florian Lier, Simon Schulz, Lars Schillingmann und Frank Hegel haben dann auch den Roboter nicht nur selbst zum Drehort gebracht, sondern auch den ganzen Drehtag vor Ort betreut.
Leider ist das zahlreiche Filmmaterial mit dem Roboter letztendlich stark gekürzt worden, auf etwa 5 Sekunden. Spaß hat es allen Beteiligten aber wohl trotzdem gemacht und war für die Bielefelder Robotik auf jeden Fall eine spannende Erfahrung.
Neue Westfälische: Ein Roboter als Fernsehstar Uni Bielefeld: Neuer Dortmund-Tatort mit Bielefelder Robotern