(this article is also available in English)
Die Vermeidung unerwünschter elastischer Effekte stellt eine große Herausforderung bei der Konstruktion von Robotern dar. Sie erschweren die präzise Positionierung des Roboterarms aufgrund statischer lastabhängiger Verbiegungen und schwingen nach jeder Bewegung nach. Vergleichbare Beispiele, bei denen Elastizitäten meist unerwünscht sind, finden wir fernab der Robotik bei Baumaschinen, wie Auto-Betonpumpen, Hubwagen aber auch Feuerwehrdrehleitern.
Wie wäre es, wenn auf die Steifigkeit bei der Auslegung einer Maschine weniger Wert gelegt werden müsste, da den damit einhergehenden unerwünschten Effekten mit regelungstechnischem Mitteln begegnet werden kann? Mechanische Strukturen könnten mit schlicht weniger Material leichter gebaut werden. Infolge dessen ließen sich Antriebe kleiner dimensionieren und hätten einen geringeren Energiebedarf.
Dieser Gedanke ist genau die Idee hinter dem Forschungsthema, dass ich bearbeite. Im Rahmen des Forschungsthemas haben wir den nachfolgend dargestellten gliedelastischen Roboterarm TUDOR als Experimentalsystem entwickelt.
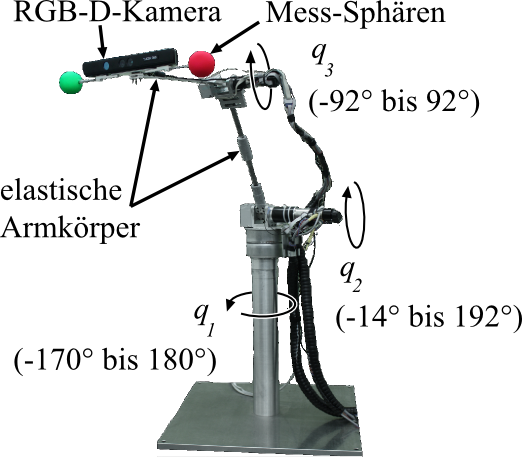
Er wird von drei bürstenlosen Gleichstrommotoren angetrieben und besitzt zwei Federstahlbalken als elastische Armkörper. Bei einer typischen Punkt-zu-Punkt-Bewegung der Antriebe treten Schwingungsamplituden von bis zu 10 cm auf.
Auf den Roboter-Konferenzen dieser Welt werden aktuell viele Beiträge zu Robotern mit elastischen Komponenten vorgestellt. Die elastischen Komponenten werden meist in die Robotergelenke integriert. Ein sehr heißes Thema sind vor allem Gelenke, bei denen sich die elastischen Eigenschaften der Komponenten aktiv variieren lassen. Die Elastizitäten bewirken, dass die aufgrund der hohen Getriebeübersetzung üblicher Roboterarme sehr großen Trägheitsmomente der Antriebe von den Trägheitsmomenten des übrigen Arms entkoppelt werden. Das bedeutet, dass im Falle eines physischen Kontakts mit dem Roboter der Interaktionspartner eine geringere Trägheit des Armes „sieht“. Damit kann beispielsweise eine Verringerung des Gefährdungspotenzials des Roboters erzielt werden. Auf der anderen Seite speichern die Elastizitäten zusätzliche Energie, die im Falle eine Kollision freigesetzt und wiederum ein erhöhtes Gefahrenpotential (Peitscheneffekt) zur Folge haben kann. Häufig werden Elastizitäten eingesetzt, um dem Roboter zu natürlicheren und auch dynamischen Bewegungen zu verhelfen. Es ist festzuhalten, dass durch eine geeignete Regelung gezielt eingesetzte elastische Komponenten zahlreiche Möglichkeiten eröffnen.
Aus regelungstechnischer Sicht sind die elastischen Eigenschaften in den Robotergelenken am einfachsten zu beherrschen. Hier ist die Elastizität entlang der Wirkachse der Antriebe konzentriert. Überwiegt die Elastizität in den Roboter Armkörpern, so sind die elastischen Eigenschaften entlang der Armkörper und senkrecht zur Wirkachse der Antriebe verteilt. Die dadurch entstehenden Laufzeiteffekte erschweren eine Regelung des Roboterarms. Dies mag der Grund sein, aus dem derzeit vorwiegend Arbeiten zu gelenkelastischen Roboterarmen publiziert werden.
Mit TUDOR hat uns zunächst die Frage interessiert, ob wir mit einem gliedelastischen Roboterarm trotz der Schwingungen und last- und konfigurationsabhängigen variablen Verbiegungen eine zielgerichtete Aufgabe präzise in geforderter Zeit erledigen können. Als Demonstration hierzu haben wir uns, wie im nachfolgenden Bild dargestellt, das Fangen eines Balles ausgedacht.
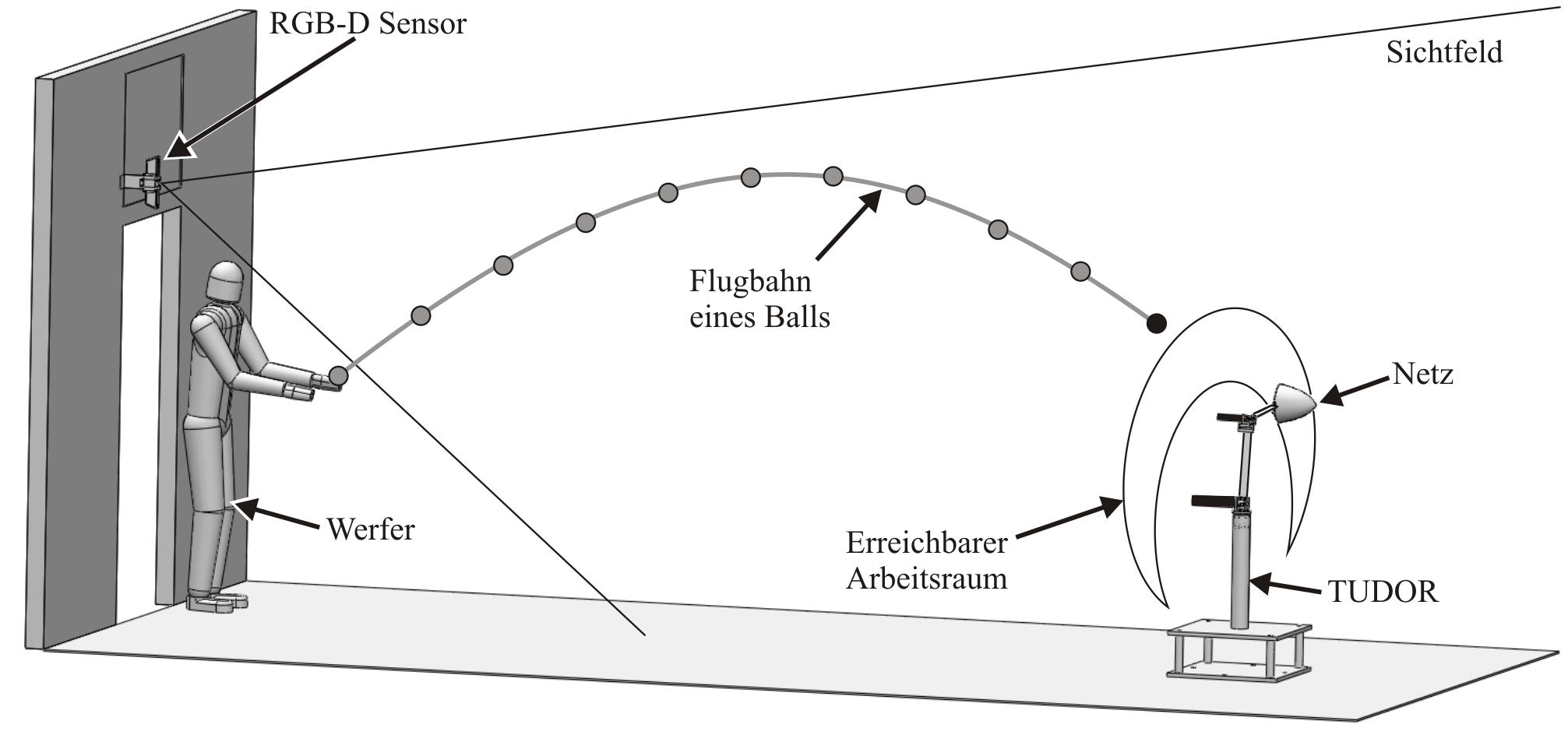
Ein menschlicher Werfer wirft den Ball in Richtung des Roboters. Die Flugbahn wird mittels einer Kinect-Kamera ermittelt und der Durchstoßpunkt der Flugbahn mit der Bewegungsebene des Roboters berechnet. Bevor der Ball am Roboter vorbei fliegt, bewegt der Roboter ein am Armende montiertes Netz dorthin und fängt den Ball damit auf. Das Resultat haben wir im nachfolgenden Video zusammengefasst:
A multi-link-flexible robot arm catching thrown softballs.Sofern die Schwingungen regelungstechnisch unterdrückt und Abweichungen aufgrund statischer Verbiegungen kompensiert werden können, ließen sich in manchen Anwendungen diese elastischen Eigenschaften vielleicht nicht mehr nur als Problem verstehen. Vielmehr könnten elastische Eigenschaften vielleicht auch ausgenutzt werden, um beispielsweise Kontaktsituationen zu erkennen und darauf zu reagieren. Mit aktiv geregelten moderat gelenkelastischen Roboterarmen wurde dies ja bereits eindrucksvoll gezeigt.
Bezüglich gliedelastischer Roboter ist die Dämpfung auftretender Schwingungen bislang noch das dominierende Thema in Publikationen.
In den vergangenen Tagen konnten wir hier womöglich einen ersten Schritt über die reine Schwingungsdämpfung hinaus machen. Basierend auf einer Kraftregelung ist es uns gelungen ein Regelungskonzept zu entwickeln, bei dem wir die Schwingungen der mechanischen Struktur eines Roboterarms unterdrücken und zugleich die Nachgiebigkeit aktiv beeinflussen können. Einige Experimente dazu haben wir in nachfolgendem Video festgehalten:
Video zur Kraftregelung eines gliedelastischen RoboterarmsIn dem Regelungskonzept wird die Information über die auf die Robterarme einwirkenden Kräfte mittels Dehnungsmessstreifen erfasst und individuell auf die Antriebsregler zurückgeführt. Auf diese Weise werden Schwingungen in der Armstruktur unterdrückt obgleich sie von der Gelenkbewegung oder der Interaktion mit der Umgebung herrühren. Zusätzlich lässt sich die Nachgiebigkeit des Roboterarms derart beeinflussen, dass wir mit sehr wenig Kraft den Roboterarm aus seiner aktuellen Position schieben können und die Wahrscheinlichkeit fragile Objekte bei einer unvorhergesehnen Kollision zu zerbrechen deutlich reduziert wird.
Also: elastische Roboterarmkörper – Fluch oder Segen? Trotz dieser Experimente sind noch zahlreiche Herausforderungen zu meistern und fragen zu beantworten. Dennoch scheint es mir, als schlummertem in den Elastizitäten der Armkörper nicht nur Probleme, sondern auch Potenziale.
Ich freue mich darauf zu sehen, wo die Reise noch hinführen wird.
Das ist ja interessanter Artikel!